
基于数字图像处理的玻璃瓶瑕疵检测系统
2014-08-10 08:09:56吴房胜徐金秀李如平
宜宾学院学报 2014年6期
吴房胜,徐金秀,李如平
(1.安徽工商职业学院电子信息系,安徽合肥231131;2.安徽鸿路集团设计院,安徽合肥231131)
基于数字图像处理的玻璃瓶瑕疵检测系统
吴房胜1,徐金秀2,李如平1
(1.安徽工商职业学院电子信息系,安徽合肥231131;2.安徽鸿路集团设计院,安徽合肥231131)
市场上众多的玻璃瓶产品表面存在裂缝、破损、磨损带过大等问题,如流入市场即成为次品并要求退回,严重影响了产品质量,并消耗了大量的劳动力.为解决此问题,研究了一套装置,利用数字图像处理技术,通过改进的Sobel检测算子方法,对采集的图像进行边缘检测,并结合ARM控制技术,自动检测玻璃瓶瑕疵,并将其剔除,替代了传统的用人工目视的检测方法,克服了人工检测速度慢、检测结果可靠性低、一致性和稳定性差,无法提高产品质量,检测效率低等问题.
图像处理;Sobel算子;玻璃瓶;瑕疵

图1 装置在线检测的结构示意图
该自动瓶检系统采用ARM技术,因其具有高性能的处理速度,该装置具有很高的检测精度,检测速度与灌装生产线的线速完全匹配,高精度微米级在线检测的精度可以根据要求任意调节,用来检测玻璃瓶瑕疵、玻璃磨损等,并可自动分类剔除次品.企业中可用于新装配线或旧线技术的升级与改造,最高在线检测速度可达到90 000个/小时[3].
2 系统的基本算法
2.1 图像增强算法
在拍摄过程中,玻璃瓶图像是通过摄相机将生产线上玻璃瓶图像抓拍下来,经过嵌入式视频采集卡采集图像信息,将其转换成BMP位图的格式存储到系统中.在图片的采集与传输过程中,难免会遭到各种外界因素(电磁辐射、噪音等)甚至人为因素的影响,使所拍摄的玻璃瓶的图像效果不太理想.这些噪声干扰对图像质量有严重影响,会使拍摄的图片变得模糊不清,虽然这些外界噪声肉眼一般是无法辨别的,但噪声干扰可以覆盖甚至改变图片特征,使系统对次品是否合格品的精确判断带来严重困难.因此,在对玻璃瓶判断检测之前,必须改善图像质量,消除噪声,使拍摄图像的轮廓更加突出[4].
拍摄的玻璃瓶图像首先采用图像增强算法对其噪声的干扰实施前期处理,保证检测精度.由于图像中的频谱处在较低的空间频率域中,而噪声频谱在空间频率区域较高,图像与噪声区域之间的关联性不大,据此可消除这些外界噪声.本系统结合实际情况,提出一种领域平均法,对采集到的图像实施滤波去噪声.该方法是一种比较简单的平滑方法,算法不但简单快捷,而且噪声平滑效果也非常好.
领域平均法的基本原理是将拍摄的图片其中一个像素的灰度值与其周围邻近的N个像素的灰度值进行叠加,然后除以N+1求平均值,作为该点像素的灰度值.该方法是比较简便的空间域处理方法.该方法利用模板计算的思想,模板操作完成了一种邻域运算,即某个确定像素点的灰度值,不仅与本像素灰度有关,而且与其邻近点的像素灰度也有关[5].邻域平均法用数学公式表达如下:

式中,f(i,j)是一幅给定的噪声图像,g(m,n)是领域平均法处理后得到的图像,S是所取邻域中各邻近像素的坐标,m,n=0,1,...,N-1,N是集合中像素点的集合.在点(m,n)的邻域中的f(i,j)的几个象素中,通过算出它们灰度值的平均值,得出g(m,n)中的每个象素点的灰度值,使图像得到平滑,在实际应用时,一般按照不同的需求选择使用不同的模板,如3×3、5×5、7×7等,在选择模板时,如果图像越大,数据运算量也越大,考虑到本装置采用32位ARM处理器控制,其处理能力远不如计算机,因此选择的模板一般要小一点,这样能够节省时间和运算量.如一种常见的3×3模板:
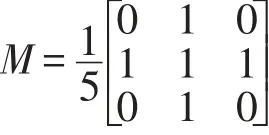
为算出新图中该点像素的灰度值,首先将原图中一个像素的灰度值与其周围邻近四个像素的灰度值相加,即将当前像素点与其上下左右四个像素点相加,再除以5求平均值,算出灰度的平均值,将求出的灰度平均值代替当前像素点的灰度值[6].
该方法就是利用四周邻近像素的平均值来代替该点像素的灰度值,从而很大程度上削弱一定频率的噪声.该方法虽减小了噪声,但图像有一定程度上的模糊.
2.2 图像边缘检测
边缘检测已成为当前工控视觉研究领域最活跃的应用领域,在工程的应用中具有举足轻重作用.图像的边缘检测,是玻璃瓶图像分割、玻璃瓶图像区域的识别及其形状提取等图像分析的关键技术基础.物体的边缘是按照图像的不连续的特征为形式出现的,也就是图像的局部亮度变化最明显的部分为物体的边缘,如纹理结构的突变、颜色的突变、灰度值的突变等,物体的边缘即为不同区域的分界处.边缘按特性分,可分为两类:一种为线条边缘,另一种为阶跃性边缘[7].当一个像素处在玻璃瓶图像中某物体的临界点上时,则其附近的领域就成了一个灰度级的变化区域.线条边缘的二阶方向导数是在边缘处取极值;而阶跃性边缘是在边缘处成零交叉,两者大不相同.针对玻璃瓶图像中各个像素的邻域,边缘检测算子均要对其定位,并对其灰度变化率及变化方向展开运算[8].
目前比较常用的边缘检测算子为Roberts检测算子,该算法是求对角线方向相邻的两个像素的差值,是一种利用局部差分算子查找边缘的算子,Roberts检测算子如表1所示,其算法如公式(2)所示,在2×2邻域上计算对角导数[9]:
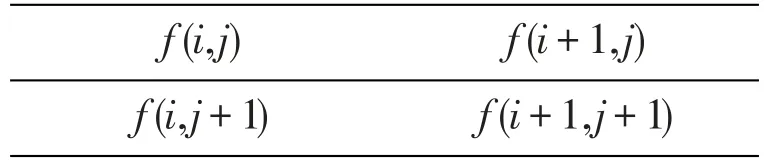
表1 Roberts算子

式中,g(i,j)为Roberts交叉算子,f(i,j)为输入的图像.进行平方根计算后,便于人眼的视觉观察.但考虑到实际情况,为了计算更加简单方便,一般采用绝对值的方法来近似计算交叉算子,算法如公式(3)所示:

另外还能够比较两绝对值的最大值,这样算更加简便,算法如公式(4)所示:

利用式(4)进行计算,对图像的边缘取向非常好.因此,对于长度相同但取向不同的图像边缘,采用公式(4)所得到的合成幅度比采用公式(2)得到的变化要小.Roberts检测算子可分别用这两个卷积核进行表达:,图像中的每个像素点均用这两个卷积核进行卷积,再利用公式(3),即可求出函数g(i,j)的结果,运算结果是一幅边缘幅度图像[10].
如果采用前面介绍的Roberts检测算子方法,图像会有一个致命的弱点,那就是图像的抗噪声能力非常低.但Sobel算子却大不相同,它是把方向差分运算与局部平均融合在一起进行计算的一种算法.该算法以图像中某个像素为中心,截取一个3×3像素的窗口,如表2所示,然后分别计算窗口像素在水平方向与垂直方向上的偏导数,算法如公式(5)、(6)所示[11].
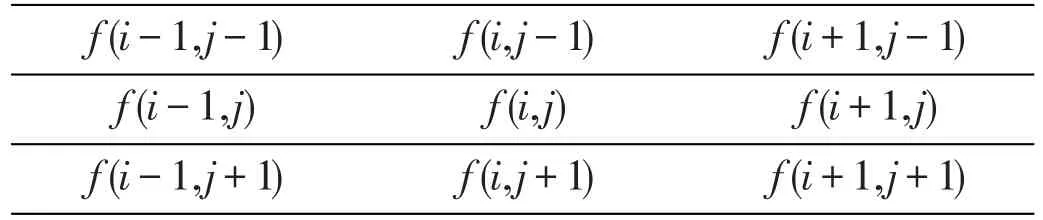
表2 Sobel算子
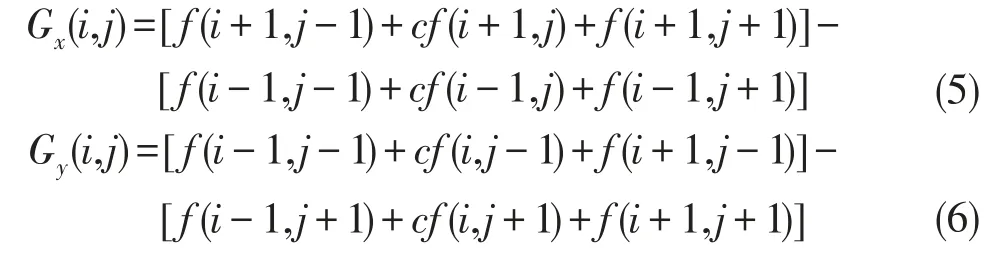
在采用Sobel进行边缘检测时,加权系数c为定值,取2,从而能够求出偏导数幅值与角度的计算公式:
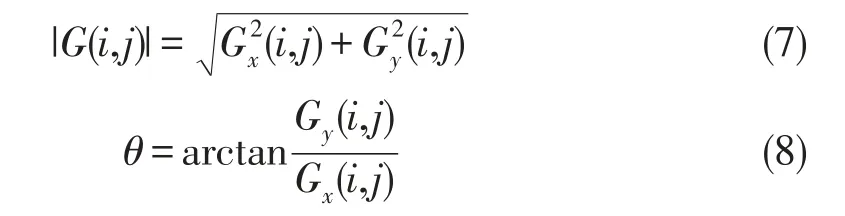
Sobel算子的卷积核可表示为:
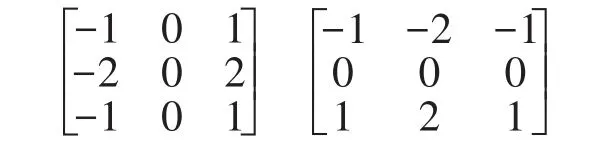
图2 Sobel算子
利用Sobel算子的两个卷积核,一个计算出图像的垂直边缘,另一个计算出图像的水平边缘,这样得到的边缘检测效果比较好,并且抗噪声效果也比较好.该算法使用的模板越大,其抗噪声能力就越好,是一种非常实用的边缘检测手段.
考虑到玻璃瓶瓶身裂纹、破裂形状的不规则性等因素,边缘在多个方向都可能存在梯度,如果能构造一个方向模板对采集的图像进行边缘检测,则能获取的玻璃瓶瑕疵信息必然会比普通的Sobel算子更齐全,考虑到实际情况,本检测装置采用改进的Sobel边缘检测算子对玻璃瓶图像进行边缘检测.
改进的Sobel边缘检测算子引入了改进的八个方向的Sobel边缘检测算子.其模板表示如图3所示.

图38 个方向的Sobel算子模板
图像中某个像素点B及周围3×3区域的灰度如图4所示,设qi为图像经过Sobel算子第i+1个模板处理后得到的B点灰度值,其中i取0到7.

图4 B像素点灰度图
则对q0计算表达式为:
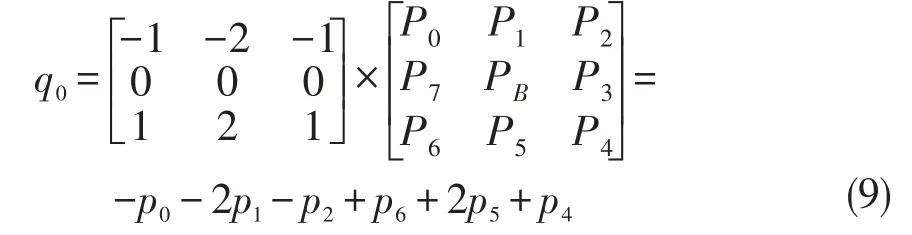
处理后的B点的灰度值为qB=max{qi},i=0,1…7.
图像处理时,对图像的扫描从第2行开始结束于第M-1行,第2列开始结束于第N-1列,这样就保证了在研究图像中任何一点(i,j)周围的3×3领域内的像素都不会超出矩阵范围.通过将八个方向的模板一一与所研究的像素中心点周围的3×3领域相点乘,得到8个值,最后取8个值中绝对值最大的作为研究的像素点(i,j)变换后的灰度值,而结果中取最大值的模板所对应的检测方向的垂向即为边缘的方向[12].
3 检测装置硬件设计
检测装置的硬件设计采用ARM控制技术,核心控制器件为三星公司的S3C2440芯片,主要完成玻璃瓶传输、数字图像处理、界面显示与次品剔除等功能.
3.1 检测装置硬件总体设计
检测装置硬件设计主要由两个部分组成:主器件控制部分与外围扩展部分.主器件控制部分由主控制芯片S3C2440、存储器、以太网控制器等组成;外围扩展部分由工控触摸屏、供电电源、通讯接口、图像采集等部分组成.系统硬件总体框图如图5所示.
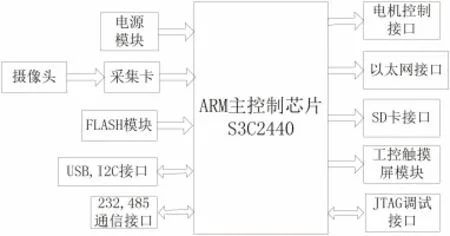
图5 系统硬件总体框图
该控制系统采用相互独立式的结构,每一个模块都可完成各自独立的功能.每个模块通过总线方式将工控触摸屏模块、主控制模块、图像采集模块联接在一起,最终实现具有图像采集、次品剔除、屏幕显示等功能的控制系统.控制板上还具有232、485等通讯接口、以太网接口、输入输出口等部分,便于系统功能的扩展与升级[13].
3.2 CCD摄像头
摄像机选用敏通公司的1/2英寸黑白低照度高解析摄像机MTV1881EX,该摄像机CCD总像素为795(水平)×596(垂直),扫描系统为625线,每秒50场,视频输出为复合式影像信号输出,具有内外同步功能和自动增益控制功能[14].摄像机镜头选用AVENIR公司的CCTVLENS型手动定焦镜头,焦距25 mm,手动光圈.
3.3 嵌入式视频捕捉卡
检测装置对图像信号的捕捉利用武汉万德数码科技有限公司的VC302嵌入式视频捕捉卡(见图6),左上侧白色插头为视频输入接口,右侧插头为与主控芯片连接的总线数据接口.其工作流程是将摄像机信号接入左侧白色插口,经过数据的采集处理,信号经过右端总线接口连到主控模块的输入总线接口,利用32位ARM芯片分析并处理数据.该视频捕捉卡提供了完整的静止和活动图像采集方案;每次捕捉并缓存1帧,支持最高25帧/秒捕捉速度;支持4种输出图像格式.

图6 VC302嵌入式视频捕捉卡
视频捕捉卡具有FIFO式存储器,在内部对玻璃瓶图像进行捕捉的同时,处理器就开始读取已捕捉的玻璃瓶图像信息,而不需要等一帧全部捕捉完成再读取,这样能够增强处理器的处理效率.该采集卡采集速度快、使用方便、性能稳定,所以本系统采用此采集卡是比较理想的选择[15].
该采集卡与ARM主控芯片的连线如图7所示,利用8位并行数据总线传输数据,采用芯片ATF16V8B输出图像采集卡的地址和片选信号,地址由VC302采集卡的地址总线A1A0两位决定.
4 检测装置软件设计
检测装置的软件采用EVC++实现的,为了使玻璃瓶瑕疵检测系统的软件便于设计、调试、移植和维护,要求整个软件系统采用独立模块化结构设计,各个模块相互独立又相互联系.
图像处理函数按功能进行了分类,软件界面可以通过多种方式调用特定的图像处理函数,并将处理后的图像显示在指定的区域,软件对图像进行数字图像处理后,检测出次品并分类剔除,流程图如图8所示.

图8 软件流程图
5 结论
上述主要介绍了玻璃瓶瑕疵检测系统硬件及软件的设计思想及程序的开发方式,在明确系统软件功能及设计任务的基础之上,根据软件功能划分设计模块并编写程序.本系统经过软硬件的调试,系统工作正常,界面友好,功能强大并易于扩展,实现了图像采集卡的连接、参数的设定、自动数字图像处理等功能.数字图像处理玻璃瓶瑕疵的过程和效果良好,检测效果图如图9(a)、(b)所示,(a)图为瓶身处玻璃破碎,(b)图为瓶身磨损带过大,这两种情况均为次品,需将其剔除.
在检测过程中,检测结果具一致性、系统精度可达到5 mm(可调)、稳定性和可靠性均达到99.99%,确保了出厂产品的合格率,实现零漏检.大大减少了人工和次品退货造成的各种费用,降低企业成本;该系统由软件控制检测精度,保证质检结果和检测精度的可靠性,极大地保障了产品质量的稳定性.
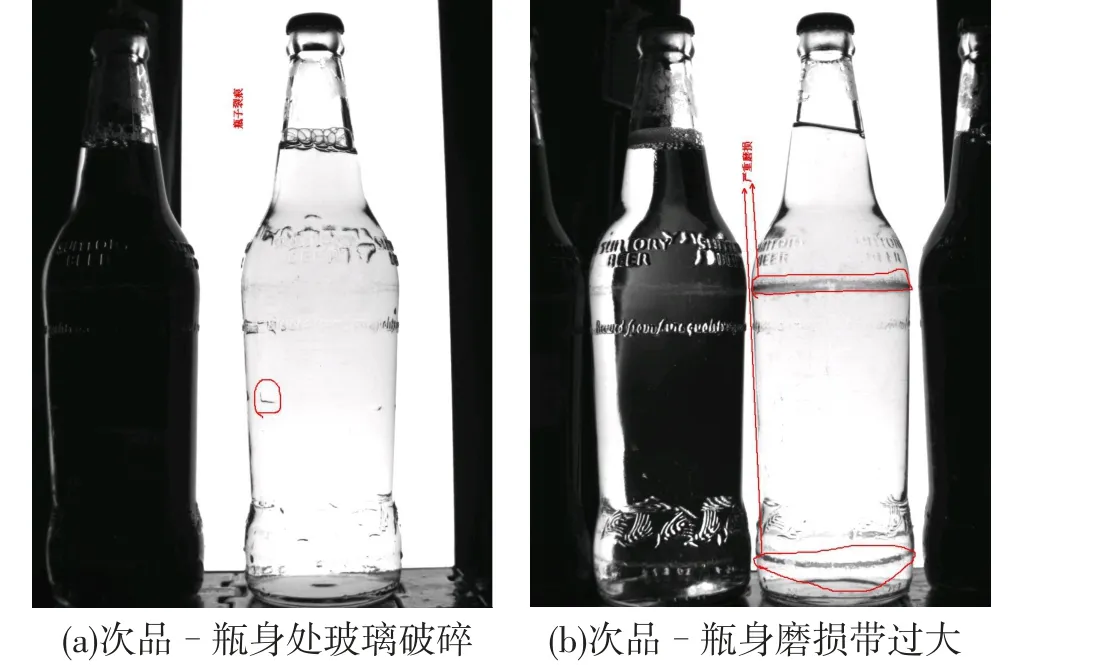
图9 次品检测示意图
[1]文西芹,张永忠.扭矩传感器的现状与发展趋势[J].仪表技术与传感器,2001(12):1-3.
[2]印保靖,成勇,史伟,等.转矩转速测量装置转速特性检测方法的研究[J].上海计量测试,2006(6):15-16.
[3]吴纪国,袁道成.数字图像处理技术在几何量精密测量中的应用研究[J].仪器仪表学报,2007(8):9-10.
[4]连锦湮.机器计算机视觉的应用——打孔机影像定位系统设计[J].今日电子,2006(10):83-86.
[5]张恒.基于ARM的视觉定位技术研究[D].广州:广东工业大学,2007.
[6]吴房胜,欧阳名三.数字图像处理技术在高精度自动对中装置中的研究[J].煤炭工程,2009(1):110-112
[7]尹建新.基于计算机视觉木材表面缺陷检测方法研究[D].杭州:浙江工业大学,2007:22-23.
[8]李群,张玉存.基于LabVIEW下扭矩传感器实验平台的研究[J].传感器技术学报,2003,16(4):504-506.
[9]沈全鹏.基于数字图像处理的车牌定位研究[D].广州:广东工业大学,2007:6-30.
[10]吴房胜,欧阳名三.电机转速测量器件高精度检测装置的研究[D].淮南:安徽理工大学,2010.
[11]于彬.基于数字图像处理的陶瓷瓶裂纹检测研究[D].湖北:武汉理工大学,2007.
[12]余苏胜.微电机电气性能智能测试系统的研究[D].杭州:浙江大学, 2001.
[13]冈萨雷斯.数字图像处理(MATLAB版)[M].北京:电子工业出版社, 2006.
[14]何秀伟.电机测试技术[M].北京:机械工业出版社,1985.
[15]Fiorini P,Shiller Z.Motion planning in dynamic environments using Velocity obstacles[J].The Internationa1 Journal of Robotics Research, 1998,17(7):760-772.
【编校:李青】
Glass Bottle Defect Inspection System Based on Digital Image Processing
WU Fangsheng1,XU jinxiu2,LI Ruping1
(1.Anhui Business Vocational College,Hefei,Anhui 231131,China;2.Anhui Honglu Group,Hefei,Anhui 231131,China)
In today’s market,a number of quality issues such as glass cracks,damage and excessive wear exist at the surface of Glass products,and if these glass bottles go into the market,they will become the defective products and lead to refunds,seriously affecting the quality of products,and consuming a lot of workforce.To solve this problem,this paper studies a set of devices using digital image processing technology to detect the acquired image edge through improved Sobel operator detection method. Combined with ARM control technology,it automatically detects and removes glass defects.Replacing the traditional methods of manual visual detection,the system overcomes the issues of slow manual testing,the low reliability of test results,the poor consistency and stability,inability to improve product quality,and the low testing efficiency.
image processing;sobel operator;glass bottles;flaws
TP231
A
1671-5365(2014)06-0103-05
目前市场上众多的玻璃产品表面,存在玻璃瓶裂缝、破损以及磨损带过大等质量瑕疵问题,该类玻璃瓶如流入市场即成为次品并要求退回,严重影响了产品质量,并消耗了大量的劳动力.为解决此问题,研究了一套检测装置,利用数字图像处理技术中的Sobel边缘检测算子方法,对采集的图像进行边缘检测,并结合32位嵌入式微处理器S3C2440,实现了玻璃瓶瑕疵的高精度自动检测,完成玻璃瓶破碎与瓶身磨损带过大等问题的检测,不仅提高了瓶检质量的可靠性、一致性和稳定性,也提高了检测效率、检测精度及产品质量,且检测功能的可扩展性较大.该系统大大降低了人工检测劳动强度,并且避免了人工的误操作,为灌装饮料企业的技术升级和改造提供了可靠保障,降低了次品率和出厂产品的退回率,提高了企业效率.
1 系统概述及工作原理
检测装置由两个部分构成,一个部分是数字图像采集处理部分,另一个部分是动作控制、检测数量控制等部分,主控制单元采用32位嵌入式微处理器S3C2440,其装置的结构示意图如图1所示.被检测的玻璃瓶安放在传送带上匀速前进,遮光密封盒为检测室的箱体,检测室箱体尺寸为110 cm(长度)×60 cm(宽度)×50 cm(高度),所有检测的玻璃瓶均通过检测室箱体,箱体内装有摄像头,并在摄像头对面开一个比检测瓶直径略大的槽口,保证有充足的光线照射.当摄像头拍摄到瓶身照片后,对其进行数字图像处理,突出边缘信息,判断玻璃瓶是否有瑕疵,并判别该瑕疵是玻璃瓶裂缝、破损还是瓶身磨损.判断瓶身磨损的方法是结合实际情况,计算瓶身磨损上下线的距离,如果计算值在人工设定值范围之内,则被判定为瓶身磨损.当玻璃瓶被分类判别后,由ARM处理器控制相应设备,将破碎的玻璃瓶剔除至检测室箱体侧面的破碎次品存放处,将瓶身磨损的玻璃瓶剔除至磨损次品存放处[1-2].
2014-04-06修回:2014-05-12
安徽省厅级自然科研项目(KJ2011B069、KJ2013Z105);2013年国家级大学生创新创业训练计划项目(201312216019)
吴房胜(1983-),男,讲师,硕士,研究方向为智能检测技术
时间:2014-05-16 11:31
http://www.cnki.net/kcms/detail/51.1630.Z.20140516.1131.006.html
猜你喜欢
小学生学习指导(高年级)(2023年6期)2023-07-04 01:38:16
红领巾·萌芽(2022年9期)2022-11-24 05:55:46
小学生学习指导(高年级)(2021年6期)2021-06-19 05:37:32
数学物理学报(2021年2期)2021-06-09 08:54:26
应用数学(2020年2期)2020-06-24 06:02:44
少儿美术(2019年12期)2019-12-14 08:09:56
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:54
学生天地(2017年12期)2017-05-17 05:51:12
小学生学习指导(高年级)(2017年6期)2017-02-18 04:34:12
数学物理学报(2016年3期)2016-12-01 05:36:27
