
基于DSP的电动车用无刷直流电机控制器的设计*
2014-08-08 09:02:48刘芳华邱忠华魏玉平
电机与控制应用 2014年4期
崔 方, 刘芳华, 邱忠华, 魏玉平
(1. 江苏科技大学,江苏 镇江 212003;2. 南京军区,江苏 南京 210016)
0 引 言
随着经济的发展,能源危机与环境污染问题日益严重,传统汽车工业面临着严峻的挑战,研制新型节能环保电动汽车成为汽车工业发展的新趋势。由于受电池技术的限制,纯电动汽车的使用场合仍不够广泛。优越的电动汽车控制器和控制算法不仅可提高能量回馈过程中的制动效果,且可有效提高能量利用率,从而延长电动车的续航里程,故有必要对电机的控制器进行研究。永磁无刷直流电机(Brushless Direct Current Motor, BLDCM)以其体积小、重量轻、控制简单、效率和能量密度高等一系列优点,已被广泛应用于电动车中,本文以BLDCM为研究对象。目前,BLDCM控制系统广泛采用传统PID控制策略,由于BLDCM控制系统具有多变量、强耦合、非线性的特点,使其控制精度不高。为提高BLDCM的控制性能,以传统PID与智能控制算法构造成的复合控制算法成为BLDCM控制领域研究的新方向,其中模糊PID是研究热点之一[1-3]。王葳等提出使用模糊PID算法实现对BLDCM调速系统的控制,但只局限于仿真研究,缺少试验验证[1]。耿田军等提出模糊PID算法对BLDCM在能量回馈状态下的控制[3],但考虑变量较少,控制效果不理想。
针对目前对模糊PID研究的不足,在分析BLDCM原理的基础上,研制一种新型BLDCM控制系统。该系统设计了两个双闭环控制器,一个控制BLDCM的电动运行,另一个控制BLDCM发电制动。两个双闭环均采用电流内环与速度外环的结构,其中速度环采用模糊自适应PI控制算法,电流环采用增量式PI控制算法。系统采用电机专用控制芯片dsPIC30F4012为主体进行电路设计,通过CAN总线与电动车其他控制单元进行组网通信。系统在不增加硬件的前提下,通过软件对桥式逆变电路的控制实现发电制动。将研制的控制器进行上车试验,结果表明: 在电动状态下,该系统控制的电机具有速度调节稳态误差小、自适应能力强、能量利用率高的优点;在回馈制动时,该系统具有制动时间短、速度变化平稳、能量回馈效率高的优点。试验结果验证了所研制的控制器具有良好的控制性能。
1 系统控制策略
1.1 脉冲宽度调制方式
在BLDCM电动运行状态下,脉冲宽度调制(Pluse Width Modulation, PWM)方式主要有6种[4],分别是H_PWM-L_PWM、PWM-ON、ON-PWM、H_PWM-L_ON、H_ON-L_PWM和PWM-ON-PWM。综合6种调制方式的调制效果、功率损耗、系统复杂度及成本因素,本文选用PWM-ON调制方式。
当BLDCM处于发电制动状态时,需要对回馈能量进行升压斩波控制。目前,有两种升压斩波方法,一种是在逆变器与电源之间加Boost变换器[5],另一种是通过软件对逆变器的控制产生一种类似于Boost电路的功能[6-7]。由于第二种方法不需要增加硬件电路,不增加系统成本就可提高系统稳定性,故本文采用第二种升压斩波方式。第二种升压斩波方式的PWM调制方式分全桥调制[6]和半桥调制[7]两种,全桥调制对制动及能量回馈的控制性能优于半桥调制,故采用全桥调制方式。
1.2 系统控制算法
根据BLDCM电动运行与能量回馈制动的原理[5],该系统采用转速外环和电流内环的双闭环串级控制结构。其中,电流环使用增量式PI控制算法,速度环采用模糊自适应PI控制算法。
本文设计的BLDCM控制系统结构图如图1所示。系统包括转速控制器和电流控制器,其中转速控制器由增量式PI控制器和模糊控制器共同构成。电动运行模式下,转速控制器的输入e=nref-n,电流控制器的输入Δi=i*-i;发电制动模式下,转速控制器的输入e=-nref+n,电流控制器的输入Δi=-i*+i。其中,nref为给定转速;n为电机实际转速;i*为转速控制器输出的电流值;i为电机实际电流
电流环的增量式PI算法表达式如式(1)~(3)所示为
(1)
Δu(k)=u(k)-u(k-1)
(2)
Δu(k)=kp(e(k)-e(k-1))+kie(k)T
(3)
式中:T——微控制器的采样周期;
e(k)——第k次采样时刻输入的偏差值;
kp——比例系数;
ki——积分系数,ki=kp/Ti;
u(k)——第k次采样电流环的输出值。
为防止电机绕组中电流过大,系统设置电流环输出的最大值,即对PWM占空比进行限制。
图1中,模糊控制器的输入为给定转速与实际转速的偏差e及其变化率ec,输出为PI控制器比例系数kp、积分系数ki的整定变化量Δkp、Δki。系统采用{NB、NM、NS、ZE、PS、PM、PB}7个模糊状态,电动运行模式下的论域C={-6,-4,-2,0,2,4,6},能量回馈模式下的论域C={-3,-2,-1,0,1,2,3}。控制器隶属度函数采用识别性较高的三角函数。根据经验和专家知识,建立Δkp、Δki的模糊规则,分别如表1、表2所示。
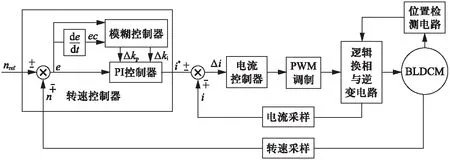
图1 BLDCM控制系统结构图
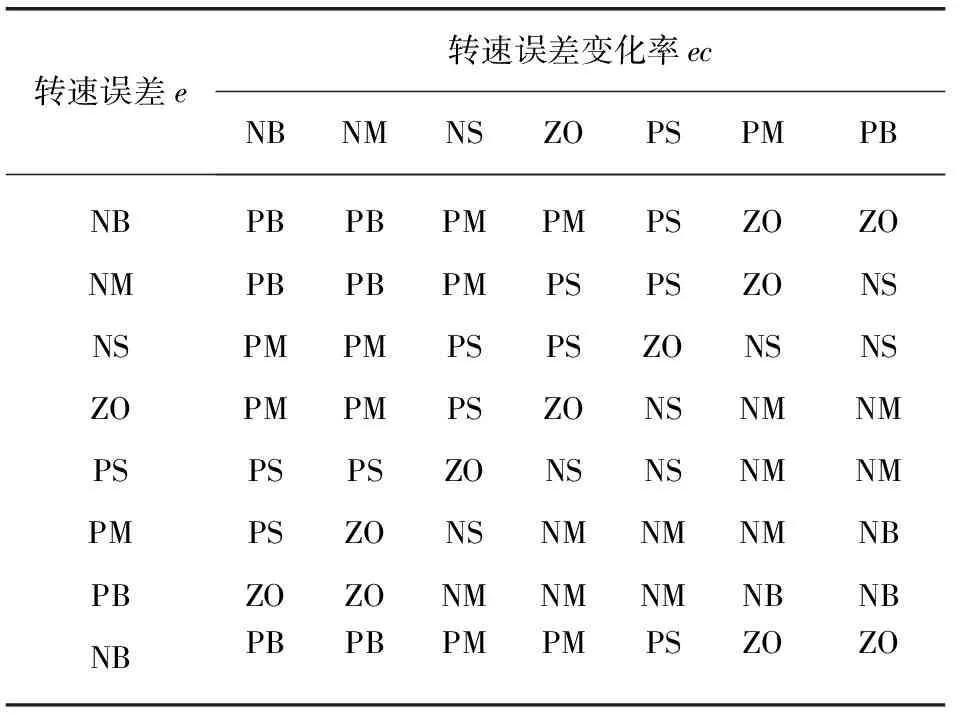
转速误差e转速误差变化率ecNBNMNSZOPSPMPBNBPBPBPMPMPSZOZONMPBPBPMPSPSZONSNSPMPMPSPSZONSNSZOPMPMPSZONSNMNMPSPSPSZONSNSNMNMPMPSZONSNMNMNMNBPBZOZONMNMNMNBNBNBPBPBPMPMPSZOZO
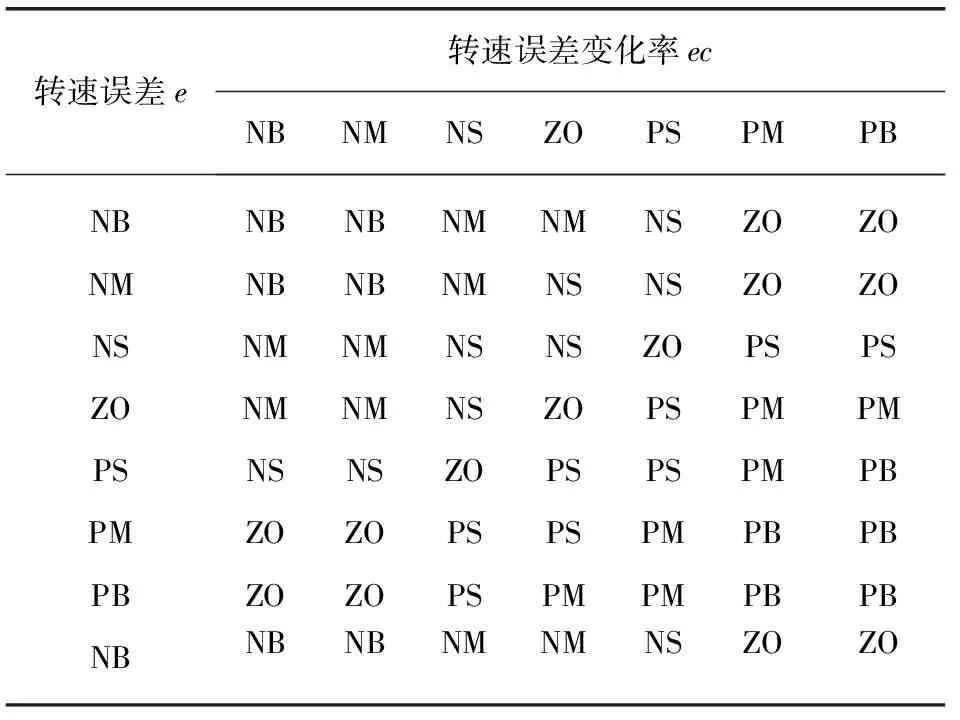
表2 Δki的模糊控制规则表
采用Mamdani模糊逻辑推理,加权平均法进行解模糊,求出模糊控制输出的精确量{ek,ecj}。再根据式(4)得出kp和ki为
(4)
式中,kp0,ki0分别为比例系数和积分系数的初始值。
在运行中对e和ec进行实时监测,并将其量化到相应的论域中,然后到控制表中查找各个参数的相应修正值,完成对kp和ki的在线自整定。
2 控制系统设计
2.1 硬件设计
本文设计了以DSP为核心的电动车用BLDCM控制系统的硬件结构图,如图2所示。上电时,整车控制器通过CAN总线向电机控制器发送指令报文,电机控制器定时回传电机的运行状态(包括电动运行和回馈制动),检测电路检测霍尔位置传感器的状态,根据PWM调制方式,产生当前状态下的各路驱动的逻辑信号,经功率驱动电路放大,对桥式逆变电路进行控制,进而实现对电机转速、转矩的控制。逻辑保护电路起到对控制系统的硬件保护作用,当DSP受到干扰出现执行指令不正确时,仍可对系统进行硬件保护。
图2逆变电路中的功率管Q1~Q6是NMOS管。逆变电路中的RCD吸收电路,虽降低了系统效率,但可对由高频开关产生的du/dt或di/dt起到限制作用,并将NMOS管的功耗转移到R,从而降低开关损耗。栅漏极间的稳压二极管与电阻组成的悬浮电路可将栅极电压拉到低电位,保证功率管可靠关断。
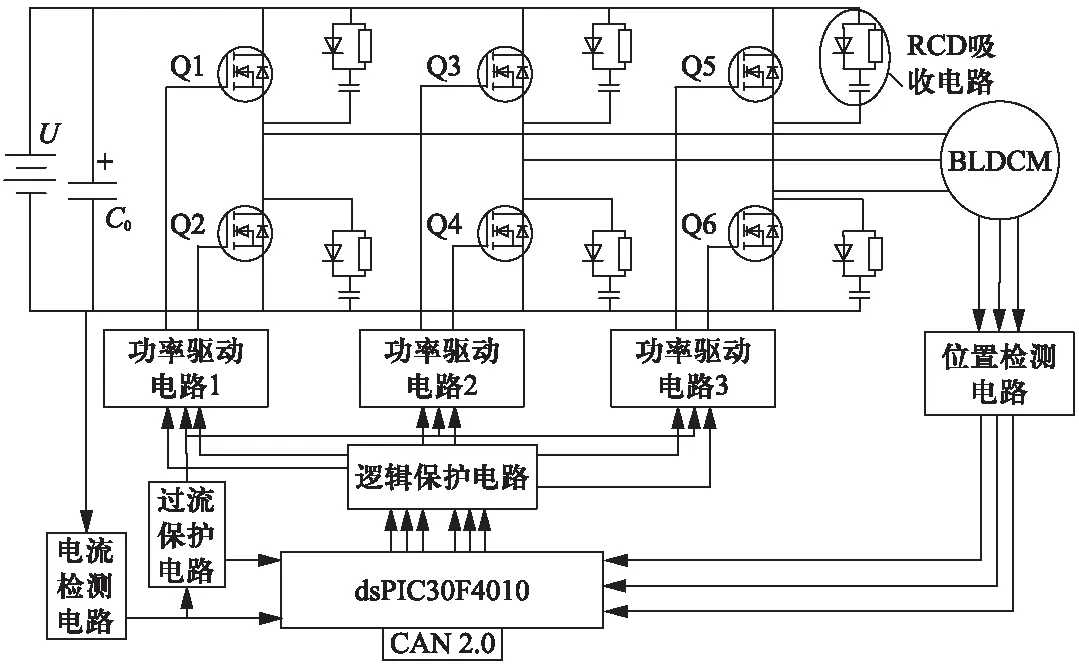
图2 电动车用BLDCM控制系统硬件结构图
2.2 软件设计
根据控制系统的功能要求,将控制系统分为若干模块。本控制系统软件由主程序和若干中断服务子程序组成。主程序主要完成上电自检,对芯片、变量的初始化及发送CAN指令报文等。中断服务子程序包括霍尔电平变化中断服务子程序、A/D转换中断服务子程序、CAN中断服务子程序和定时器中断服务子程序等。
霍尔电平变化中断服务子程序实现对电机的换相控制和当前转速计算。A/D转换中断服务子程序的功能是将手柄电压和电机母线电流采样值进行A/D转换,同时将转换后的手柄电压转换为转速。CAN中断服务子程序完成总线报文的接收。在定时器中断服务子程序中完成CAN报文的发送,同时根据系统的工作状态完成相应的控制算法计算。定时器中断流程图如图3所示。控制器根据表3所示的关系导通MOS管。
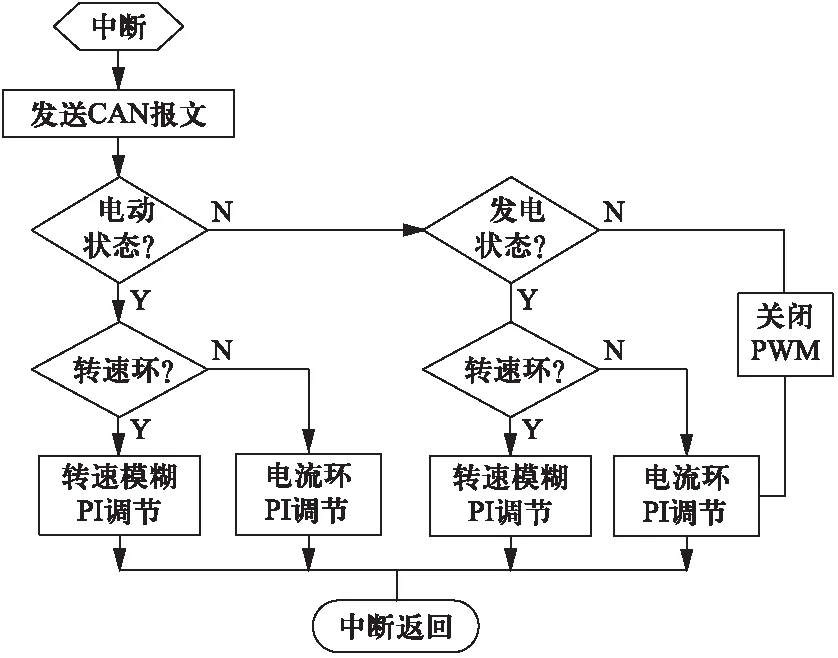
图3 定时器中断流程图
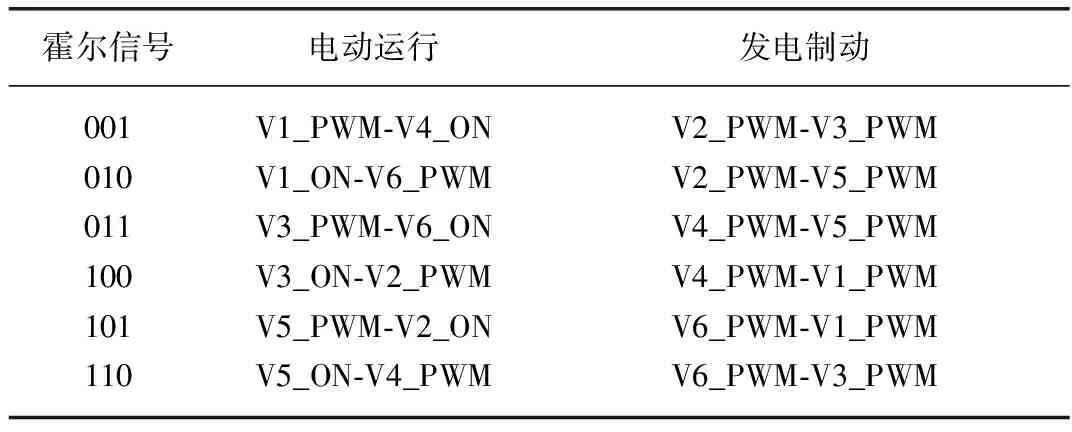
霍尔信号电动运行发电制动001V1_PWM-V4_ONV2_PWM-V3_PWM010V1_ON-V6_PWMV2_PWM-V5_PWM011V3_PWM-V6_ONV4_PWM-V5_PWM100V3_ON-V2_PWMV4_PWM-V1_PWM101V5_PWM-V2_ONV6_PWM-V1_PWM110V5_ON-V4_PWMV6_PWM-V3_PWM
3 试验结果
将所研制的控制器安装在BLDCM试验平台上,对其进行功能有效性验证。其试验用BLDCM的技术参数: 额定功率1kW,额定电压48V,额定转速2000r/min,最大效率点电流43A,相电阻0.2Ω,相电感8.5mH。
电机在电动和发电状态的转速变化曲线,分别如图4所示。其中实线是使用模糊PI控制器控制下的电机转速变化曲线,虚线是使用PI控制器控制下的电机转速变化曲线。由图4(a)可知,在模糊PI控制器控制下,电机具有速度响应快、系统超调量小、稳态误差小等特点。由图4(b)可知,与采用PI控制策略的普通控制器相比,模糊PI控制器具有速度变化平稳、制动时间短等特点。
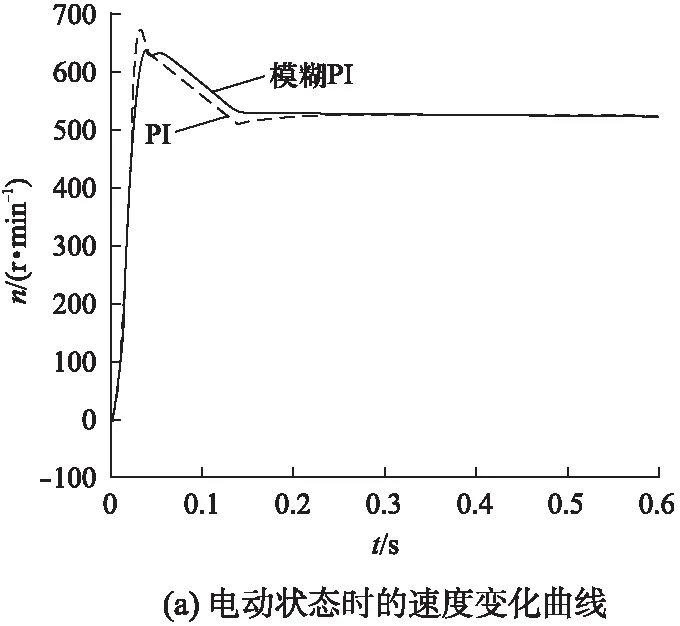
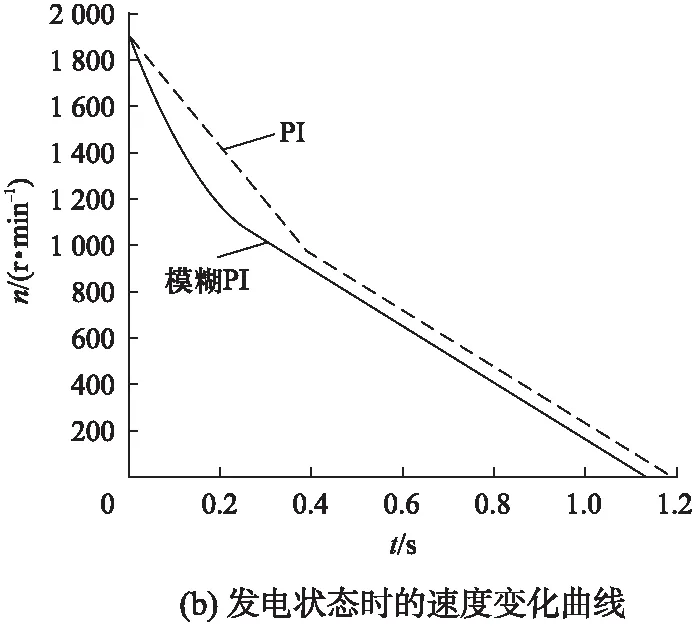
图4 电机转速曲线图
根据试验数据计算出,当电机转速n为1800r/min时,切换成发电状态,系统能量回馈效率为0.75,说明本文设计的模糊PI控制器具有能量回馈效率高的特点。试验结果说明所研制的控制器对电机具有良好的控制性能。
4 结 语
本文设计了以dsPIC30F4012为控制核心的电动车用BLDCM控制系统,介绍了控制系统的硬件及软件设计方案。试验结果表明,根据本设计方案研制的控制器对电动车用BLDCM具有良好的控制性能,具体如下:
(1) 在电动模式下,系统响应速度快、超调量小,系统具有自适应能力强、鲁棒性好的特点。
(2) 在回馈制动模式下,电机速度下降平稳、制动时间短、能量回馈效率高。
该控制器实现了电动车平稳运行、能量利用率高、单次充电行驶里程长的目标。目前该控制器已通过样车试验。
【参考文献】
[1] 王葳,张永科,刘鹏鹏,等.无刷直流电机模糊PID控制系统研究与仿真[J].计算机仿真,2012,29(4): 196-199.
[2] 李晓竹,姚刚.基于MATLAB/Simulink的BLDCM直接转矩控制系统仿真[J].制造业自动化,2011,33(17): 129-131.
[3] 耿田军,贾洪平,刁研.电动车防抱死再生制动系统的实验研究[J].微电机,2013,46(5): 40- 43.
[4] 孙鹿,陶宏敬.永磁无刷直流电机PWM-ON-PWM调制方式研究[J].自动化技术与应用,2013,31(7): 42- 45.
[5] 刘刚,王志强,房建成.永磁无刷直流电机控制技术与应用[M].北京: 机械工业出版社,2008.
[6] PAN Z Y, LUO F L. Transformer based resonant DC link inverter for brushless DC motor drive system[J]. IEEE Transactions on Power Electronics, 2005,20(4): 939-947.
[7] 成立,奚家健,李宁,等.一种半/全桥PWM切换策略电动车能量回馈法[J].江苏大学学报(自然科学版),2013,34(3): 304-308.
猜你喜欢
制造技术与机床(2017年6期)2018-01-19 02:41:07
时代英语·高二(2017年4期)2017-08-11 11:54:16
解放军健康(2017年5期)2017-08-01 06:27:44
中国科技纵横(2015年2期)2015-11-05 02:30:11
电源技术(2015年9期)2015-06-05 09:36:06
科学中国人(2014年16期)2014-11-20 02:50:00
中国新技术新产品(2014年3期)2014-03-24 07:39:08
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
上海金属(2013年4期)2013-12-20 07:57:17
赤峰学院学报·自然科学版(2012年19期)2012-10-14 02:54:02
