
激光雷达的应用及发展趋势
2014-08-08 02:15:41赵一鸣李艳华商雅楠李凉海
遥测遥控 2014年5期
赵一鸣, 李艳华, 商雅楠, 李 静, 于 勇, 李凉海
(北京遥测技术研究所 北京 100076)
激光雷达的应用及发展趋势
赵一鸣, 李艳华, 商雅楠, 李 静, 于 勇, 李凉海
(北京遥测技术研究所 北京 100076)
相比传统雷达技术,激光雷达以它的高测量精度、精细的时间和空间分辨率以及大的探测距离而成为一种重要的主动遥感工具,不但能够精确测距,而且能够精确测速、精确跟踪,在民用、军用领域具有广阔的应用前景。首先简要回顾了激光雷达技术的产生与发展历程,介绍了激光雷达技术的系统组成与关键技术,着重分析了地球科学与气象应用领域中的大气探测激光雷达,陆地、海洋探测激光雷达;空中交会对接领域的激光技术;军事应用中的侦察成像激光雷达,障碍回避激光雷达,化学/生物战剂探测激光雷达,水下探测激光雷达,空间监视激光雷达的国内外研究现状和现有技术水平。最后对激光雷达的发展趋势及重要意义进行了总结,提出作者的建议。
激光雷达; 应用; 发展趋势
引 言
激光雷达Lidar(LIght Detection And Ranging)是一种主动式的现代光学遥感技术,是传统雷达技术与现代激光技术相结合的产物。激光具有高亮度性、高方向性、高单色性和高相干性等特点,因此激光雷达具有一系列独特的优点:角分辨率高、距离分辨率高、速度分辨率高、测速范围广、能获得目标的多种图像、抗干扰能力强。同时激光雷达的体积和重量都比微波雷达小,使用方便灵活。
激光雷达是以激光束作为信息载体,可以用振幅、相位、频率和偏振来搭载信息的雷达。它不但能够精确测距,而且能够精确测速、精确跟踪。继微波雷达之后,激光雷达把辐射源的频率提高到光频段,比毫米波高出两到四个数量级,这使之能够探测微小自然目标,包括大气中的气溶胶。图1所示为包括光波段与微波波段的电磁波谱以及各波长大气透过率,激光雷达所用波长为图中红线波段内。
本文主要从激光雷达的概念、系统组成入手,根据激光雷达工程及实际应用的不同进行分类,并着重介绍了地球科学与气象应用领域中的大气探测激光雷达,陆地、海洋探测激光雷达;空中交会对接领域的激光技术;军事应用中的侦察成像激光雷达,障碍回避激光雷达,化学/生物战剂探测激光雷达,水下探测激光雷达,空间监视激光雷达的国内外研究现状和现有技术水平。

图1 电磁波谱及其大气透过率
1 激光雷达的概念
激光雷达是一种通过探测远距离目标的散射光特性来获取目标相关信息的光学遥感技术。随着超短脉冲激光技术、高灵敏度的信号探测和高速数据采集系统的发展和应用,激光雷达以它的高测量精度、精细的时间和空间分辨率以及大的探测跨度而成为一种重要的主动遥感工具。
微波雷达使用的频段,除了金属目标物有明显的反射外,其他非金属物质,诸如岩石、雨滴等只能产生极其微弱的回波信号[1]。在大气探测应用中,只能与大气中的云、雨、雪等大尺寸粒子或大范围的大气不均匀体相互作用产生回波,一些细小目标物,如大气分子和气溶胶基本上不会产生可探测的回波信号,从而对晴空均匀大气直接穿透形成探测盲区。激光雷达主要使用电磁波谱中的近红外、可见光及紫外等波段,波长可以从250nm到11μm[2],比以往雷达用的微波和毫米波短得多,并且激光光束因其发散角小,有着很窄的波束,能量集中,加之光束本身良好的相干性,这样可以达到很高的角分辨率、速度分辨率和距离分辨率,更小尺度的目标物也能产生回波信号,对探测细小颗粒有着特有的优势。激光雷达探测原理如图2所示。
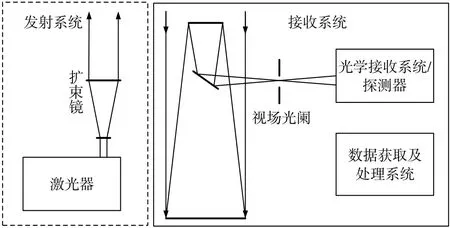
图2 激光雷达探测原理
激光雷达是激光、大气光学、雷达、光机电一体化和电算等技术相结合的产物,几乎涉及了物理学的各领域。目前激光雷达种类繁多,可以按照所用激光器、功能用途、运载平台及探测技术进行分类。
对于不同的用途激光雷达所选择的激光器不同,大多数的激光雷达使用的是气体或固体脉冲激光器,也有部分使用气体连续激光器。目前激光雷达中常用的激光器有CO2激光器(9.2~11.2μm)、Er:YAG激光器(2μm)、拉曼频移Raman-shifted Nd:YAG激光器(1.54μm)、Nd:YAG激光器(1.06μm)、GaAIAs半导体激光器(0.8~0.904μm)、HeNe激光器(0.63μm)、倍频Nd:YAG激光器(0.53μm)等。
微波雷达接收的信号大多数情况下为目标物的反射信号,而激光雷达可以接收反射信号,也可以接收弹性散射信号,如瑞利散射(Rayleigh scattering)、米散射(Mie scattering)信号、共振散射信号(resonancescattering)、荧光信号(fluorescence)及拉曼散射信号(Raman scattering),相应的有不同类型的激光雷达[3]。
从实际工程和应用角度来说,激光雷达的分类方式繁多:
按照激光波段来分,有紫外激光雷达、可见激光雷达和红外激光雷达等。
按照激光器的工作介质分,有固体激光雷达、气体激光雷达、半导体激光雷达、二极管泵浦固体激光雷达等。
按照激光发射波形分,有脉冲激光雷达、连续调制激光雷达等。
按功能用途来分,有激光测距雷达、激光测速雷达、激光测角和跟踪雷达、激光成像雷达、大气探测激光雷达和生物激光雷达等。
按照激光雷达的载荷平台可分为便携式激光雷达、地基激光雷达、车载激光雷达、机载激光雷达、船载激光雷达、星载激光雷达和弹载激光雷达等。
按照激光雷达探测技术的不同,可以分为直接探测激光雷达和相干探测激光雷达两种类型。
按照体制来分,有多普勒激光雷达、合成孔径成像激光雷达、差分吸收激光雷达、相控阵激光雷达等。
鉴于激光雷达能全天时对地观测,受地面背景、天空背景干扰小,并具有高分辨率和高灵敏度,激光雷达可以广泛应用在环境监测、海洋探测、森林调查、地形测绘、深空探测、军事应用等方面。
激光雷达由于单色性好、方向性强、相干性好、体积小等特点,在气象领域也得到了广泛的应用,可以用来测量气溶胶、云、雾、能见度、空中风场、温室气体、污染气体、温度和湿度的变化,精确的实时数据不仅是飞行的保障,而且能为研究大气变化、天气预报和建立正确的大气模型提供依据,对全球长远气候变化和全球碳循环的认知和预测有重要的指导意义。大气垂直尺度的精确风场、海洋风场、平流层的风场,无论从民用还是军用的角度,都有着极其重要的意义。利用后向散射激光雷达可以探测可吸入颗粒物和云-气溶胶的浓度和立体分布;利用多普勒激光雷达可以测量大气风场,包括风切变、风速等信息;利用差分吸收雷达可以测量温室气体和污染气体的浓度和分布。
激光雷达的海洋应用平台包括机载平台、船载平台以及水下平台,用于探测浅海水深、水雷、温度、海浪、海洋叶绿素、油污以及海洋油气勘查等。水深测量一般基于浅海、岛礁或者船只无法到达的海域。机载海洋激光雷达可以快速扫描,获得浅海地貌,测量效率远远高于声纳测量。另外浅海水深测量与水下目标探测密切相关,利用水深测量技术可以对水下目标(如潜艇、水雷等)进行探测。
在森林探测方面,激光雷达发射的激光脉冲能部分穿透植被冠层,通过回波波形数据可以分析出整个植被冠层的三维结构和冠层下的地形,可以测量和估算树木高度、冠层结构等参数,从而估算森林生物量,为其他林业研究提供基础数据。
激光雷达由于工作波长短,具有极高的方向性和角度分辨率,可以实现对距离、速度、角度、姿态等参量的高精度测量,而且其体积小、重量轻、功耗低,再加上空间没有大气衰减和散射的问题,激光雷达在空间飞行器(如卫星、飞船)上具有很好的应用前景。目前激光雷达已在地球(星体)激光测高仪、航天器对接、飞行器接近成像、航天器着陆导航等空间领域得到应用,近十多年来发展迅速,已成为激光雷达最重要的应用方向之一。
在军事应用方面,激光雷达可以用于武器制导、飞行器导航、战场侦查、高空监视、障碍规避、低空探测、生化战剂探测、水下探测和水雷搜索等。现代战场上,小到单兵定位,大到对整个战场的监控,战争的各个环节都有激光雷达的用武之地。
2 激光雷达的国内外发展现状
2.1 地球科学与气象应用
2.1.1 大气探测激光雷达
1云-气溶胶探测激光雷达
用于气溶胶探测的激光雷达主要是以单波长或多波长(如Nd:YAG激光器1064、532、355nm)米散射激光雷达为主[2],地基、机载、星载等多种平台应用,技术比较成熟。单波长米散射激光雷达可以用来探测大气气溶胶的光学特性,主要有散射系数、消光系数、雷达比。而多波长激光雷达除了可以得到上述参数以外,还常用于反演气溶胶的粒谱分布及不同波长的气溶胶消光系数,为研究激光在大气中的传输特性、大气湍流等提供科学依据。
1994年搭载发现号航天飞机升空的LITE激光雷达是世界上第一台星载激光雷达[4],它采用355nm、532nm和1064nm三个波长,在10天的飞行任务中,LITE共收集了45小时的大气散射曲线数据,对层云、对流层和平流层的气溶胶、沙漠气溶胶、化学燃烧的烟雾等进行了初步探测,LITE的观测结果非常令人满意。图3是LITE的外形图。
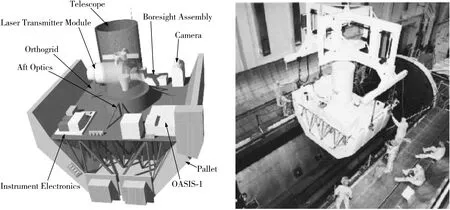
图3 星载大气探测激光雷达LITE外形图
2003年,美国地球观测GLAS激光测高系统装载到全球首颗激光测高试验卫星ICESat升空[5],GLAS采用了532nm和1064nm两个波长,主要科学目的是了解极地冰雪变化物质总量平衡、测量全球范围云层高度和云/气溶胶垂直结构以及绘制陆地拓扑图。图4是GLAS激光测高系统外形图。发射机为半导体泵浦的Nd:YAG激光器,脉冲宽度为5ns,1064nm脉冲能量为75m J,532nm脉冲能量为32mJ。接收望远镜口径为100cm。

图4 美国地球观测GLAS激光测高系统外形图
2006年4月28日,装载正交偏振云-气溶胶激光雷达(CALIOP)的CALIPSO卫星由德尔它-Ⅱ火箭发射升空[17]。图5是CALIOP系统外形图。CALIPSO卫星的配置包括三个仪器:①云-气溶胶激光雷达CALIOP;②三通道红外成像辐射计ⅡR(Imaging Infrared Radiometer);③宽带照相机(Wide Field Camera)。CALIOP除采用532nm和1064nm两个波长外,还增加了偏振检测技术,实现了全球覆盖,其首批试验结果更表明,CALIOP具备识别气溶胶、沙尘、烟尘以及卷云的能力,它成为世界上首个应用型的星载云和气溶胶激光雷达,其观测能力优异。

图5 正交偏振云-气溶胶激光雷达CALIOP系统外形图
欧洲空间局(ESA)在过去20年进行了多项激光雷达试验[6],其中包括后向散射激光雷达ATLID。1996年发射的ATLID(Atmosphere LIDAR)是ESA支持的第一个空间激光雷达项目,它采用1064nm波长,主要用于云顶高和云层边界层的测量,它利用线性扫描扩大观测视场以保证在800km轨道高度进行全球覆盖。图6是ATLID外形图。
ESA预计2013年发射EarthCARE卫星[7],其主要目的是定量测量云和气溶胶之间的相互转换,并准确地添加进气候和天气预报数学模型中。该卫星的配置有后向散射激光雷达ATLID、云廓线雷达(Cloud Profiling Radar)、多光谱成像仪(Multi-Spectral Imager)和宽带辐射计(Broad-Band Radiometer)。其中ATLID激光雷达采用355nm的紫外激光光源,脉冲能量30mJ,重复频率74Hz,激光线宽50MHz。接收望远镜直径为0.6m。
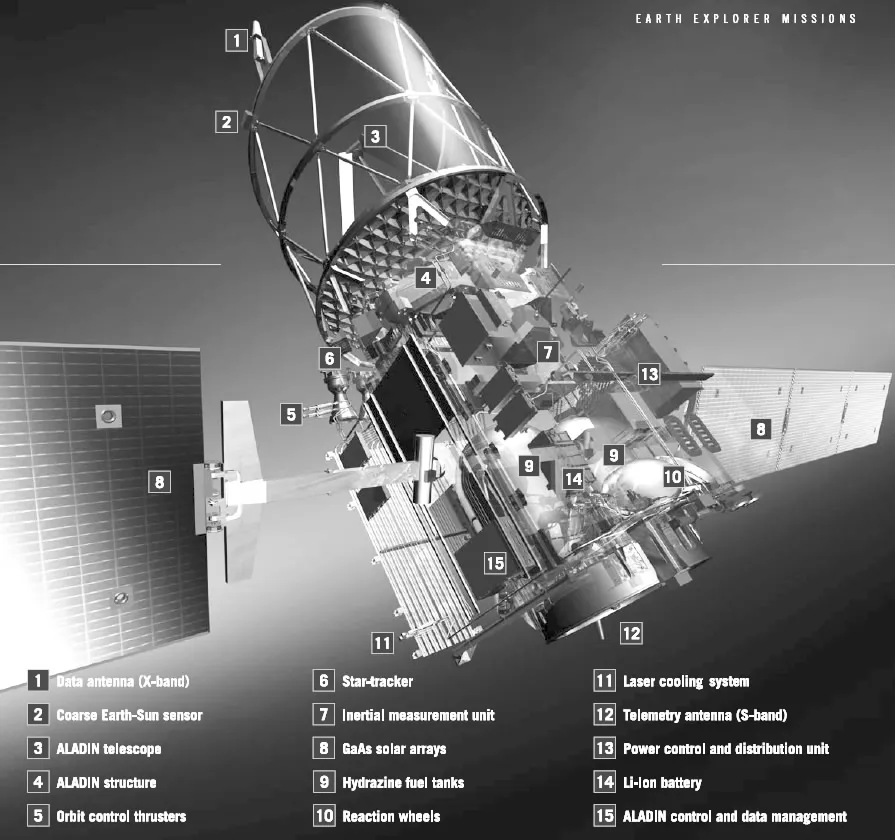
图6 欧空局后向散射激光雷达ATLID外形图
表1和表2分别列出了已发射和在研的星载云-气溶胶探测激光雷达相关参数信息。

表1 已发射的星载云-气溶胶探测激光雷达[8]

续表

表2 在研的星载云-气溶胶探测激光雷达[5]
我国尚没有星载大气激光雷达发射计划,主要的激光雷达研究单位有中科院安徽光机所、中科院上海光机所、中科院武汉物数所、中科院空间中心、中国海洋大学、武汉大学、西安理工大学、北京理工大学、中国科技大学、中国电子科技集团、北京遥测技术研究所等单位。其中,中国海洋大学较早开始基于高谱分辨激光雷达的气溶胶及风场探测工作,还为中欧开展的龙计划Ⅱ开发了新型地基激光雷达[9]。中科院安徽光机所在激光雷达设备研制上积累了多年经验,研发了多种激光雷达,取得了很好的应用效果[10]。中国科技大学研发了米-瑞利-钠荧光和多普勒测风激光雷达[11]。西安理工大学发展了多套不同类型的激光雷达[12]。中科院上海光机所和中国电子科技集团分别研发了测风激光雷达系统[13]。北京理工大学最近也研制了一台拉曼-米散射激光雷达进行气溶胶探测[14]。中科院光电研究院还和法国科学家合作进行机载激光雷达探测的研究[15]。
北京遥测技术研究所在2012年成功研制了具有国际先进技术水平的大气探测激光雷达产品[16],能够在复杂天气条件下长期运行,工作性能稳定,可提供高质量的一级、二级、三级数据产品。其反演数据能够准确表征大气中气溶胶、云层等目标的三维精细结构和时空演化过程,可有效分辨大气中气溶胶的不同模态和云层相态,区分局地颗粒物和外来沙尘以及局地污染和远距离输送污染,并可实时跟踪污染物的时空演化状态,有助于分析污染物来源和传输路径。北京遥测技术研究所多波长拉曼偏振大气探测激光雷达产品实物和数据结果分别示于图7和图8。该产品在对沙尘、灰霾、火山灰等大气环境的实时三维空间监测中表现出优异的性能。

图7 北京遥测技术研究所多波长拉曼偏振大气探测激光雷达产品实物图

图8 北京遥测技术研究所多波长拉曼偏振大气探测激光雷达数据结果
2多普勒测风激光雷达
激光雷达通过测量大气中自然出现的少量颗粒的后向散射,可以检测风速、探测紊流、实时测量风场等,通常有两种探测机制——非相干多普勒测风激光雷达与相干多普勒测风激光雷达。国外使用激光雷达进行大气风速测量始于上世纪七十年代初期[11],当前欧洲、美国、日本均已研制了机载大气风场探测激光雷达,并已进行了相关试验。世界上第一台星载大气风场探测激光雷达是欧空局研制的ALADIN[18],计划于2014年由ADM-AEOLUS卫星携带升空,它采用355nm直接探测多普勒测风激光雷达,可实现0~30km高度三维风场测量。美国NASA和NOAA也已计划了星载测风激光雷达NPOESS[19],它采用355nm直接多普勒探测和2μm相干多普勒探测相结合的方式,可实现全球高度三维风场测量。中国海洋大学也已成功研制出测风激光雷达,其系统外观和实测结果分别示于图9和图10。

图9 中国海洋大学测风激光雷达系统外观

图10 中国海洋大学测风激光雷达实测结果
①非相干多普勒测风激光雷达发展状况
1979年,美国Michigan大学的空间物理研究实验室研制了第一台车载激光多普勒雷达[20],其系统光源为Nd:YAG激光器和染料激光器,采用高分辨率的Fabry-Perot干涉仪和多环阳极探测器,模拟了大气风场的测量。该雷达在对流层、平流层可以实现的测风精度为2m/s,中间层精度为5m/s。1994年,该所研制了可移动的高分辨率多普勒激光雷达,激光源为532nm的Nd:YAG种子注入倍频激光器,脉冲能量60mJ,重复频率50Hz,线宽为0.0045cm(135MHz)、脉冲振动不超过±0.6ns。采用Fabry-Perot干涉仪和窄带干涉滤光片相结合的方法滤除白天背景光,在大气对流层和低平流层实现了风速测量和气融腔负载轮廓的测量,白天探测距离为1500m,白天和黑夜在大气边界层垂直分辨率为100m,时间分辨率为5min,风速精度为1~2m/s。
法国国家科学研究中心研制了地基非相干多普勒激光测风系统,激光源波长532nm,脉冲能量250mJ,重复频率30Hz,采用双Fabry-Perot干涉仪来测量大气分子散射,获得了高度为25~60km的高空风速数据[23]。
美国Cornell大学的Arecibo观测中心也研制了一台Rayleigh非相干多普勒激光雷达系统[20],获得了中高空大气的水平风场信息。
2000年,日本福井大学研制了小型测风激光雷达[21],系统采用Fabry-Perot单边缘技术及连续二极管泵浦的Nd:YAG激光器,波长532nm,激光重复频率从1kHz到10kHz进行调节。当重复频率为10kHz时,脉冲能量0.1mJ,由于发射能量小,该雷达只对4km以下风场进行测量。
美国NASA/GSFC于2001年研制成功的GLOW(Goddard Lidar Observatory for Wind)系统[22],是一套基于双边缘检测技术的车载测风激光雷达。GLOW系统实物示于图11。它可以实现从地面到20km、垂直分辨率为1km的风廓线测量。
美国Michigan航天公司于2001年研制了两套GroundWinds地基测风激光雷达系统[20],分别位于New Hampshire和Hawaii,系统采用Fabry-Perot双边缘技术测量0.5~40km的风廓线。

图11 GLOW系统实物图
2002年,美国Colorado州立大学的She等在钠荧光激光雷达中使用Faraday滤波器滤除白天背景光[20],实现了在中层大气的温度和风速测量。
欧空局于2002年着手进行了ADM-风神计划,该卫星搭载的ALADIN(The Atmospheric Laser Doppler Instrument)星载多普勒测风激光雷达系统是全球第一台星载多普勒测风激光雷达[23],主要采用非相干(直接)探测技术测量风场廓线,可提供满足数值天气预报与气候建模需求的风场数据,为气候学和气象学服务,并为天气预报服务。ADM-Aeolus原计划2013年发射,激光波长为355nm,望远镜直径为1.5m,激光输出功率为15W,风速测量精度为1~3m/s,测量数据垂直分辨率为0.5~1km,水平分辨率为200km,寿命为3年。ALADIN通过向大气发射激光,并分别接收激光经大气气溶胶、云粒子等物质散射回的Mie散射光和经大气气体分子散射回的Rayleigh散射光,来计算由大气运动所产生的激光多普勒频移,进而计算出风速。该任务的实施将首次实现星载全球三维风场的直接观测,为气候研究与数值天气预报带来了新的机遇。该系统采用高效率、高功率、高可靠性的固体激光器;共用大口径望远镜对光学信号进行发射和接收;光学接收终端通过将条纹成像通道(分析低空气溶胶和云层)和双边缘通道(分析空气分子)相结合的方式对激光后向散射信号进行分析,可充分覆盖关注信息所在的高度范围。
②相干多普勒测风激光雷达发展状况
最早的相干多普勒测风激光雷达研究始于上世纪七十年代[13],进入九十年代以来,随着激光技术的发展,相干多普勒测风激光雷达历经了10.6μm波段、1.06μm波段、2.0~2.1μm波段和1.5~1.6μm波段几个阶段,先后采用了连续CO2激光器、脉冲CO2激光器、固体Nd激光器、闪光灯泵浦Cr,Tm,Ho激光器、固体Tm激光器、固体Er激光器作为激光器光源。目前,美国、德国、日本等国家已经先后研制了多套相干多普勒测风激光雷达系统,广泛应用于机场的风场测量、飞机飞行的气流和尾迹探测、大气湍流探测、全球气流监控、森林火警辅助预警等场合[11]。
1970年Huffaker首次报道了在实验室内利用连续单频CO2激光器进行短距离测风的实验[24]。之后连续CO2激光测风系统被广泛应用到近地面风场测量和飞机尾部涡流的探测等领域。上世纪七十年代,采用MOPA结构的CO2脉冲激光器开始被应用到相干测风雷达系统中。至今很多科研机构仍在利用CO2脉冲激光器对近地面风场进行探测研究。上世纪八十年代出现的脉冲能量1J、重复频率20Hz的TEACO2激光测风系统进一步提高了激光器脉冲能量,压缩了激光器的体积,让CO2测风激光雷达向实用化又迈进了一步。
1987年美国斯坦福大学Kane小组首次报道了利用Nd:YAG激光器作光源的1.06μm相干测风激光雷达[25]。1989年CTI公司Kavaya和Henderson首次利用1.06μm激光雷达进行远程风场探测。
1990年Suni和Henderson小组首次报道2.09μm相干激光雷达系统[13]。该系统采用闪光灯泵浦Cr,Tm,Ho:YAG激光器作光源,雷达的发射接收系统口径20cm,水平方向可以探测20km范围内的大气风场,对硬目标探测距离可达145km。
1994年,美国CTI公司(Coherent Technology Inc,后为美国最大军火公司Lockheed Martin兼并)实现了最早的2μm机载相干测风激光雷达的研制[20],该激光雷达安装在USAFC-141飞机进行了实验。后来该系统被美国海洋大气局(NOAA)成功应用于高分辨率边界层风场探测。1995年CTI公司又在美国宇航局(NASA)与美国空军的共同的资助下完成了脉冲能量10mJ、重复频率100Hz的2μm激光雷达系统的设计[22],并用于武装直升飞机C-130H进行演示实验。近些年NASA主要致力于缩小系统体积,提高系统稳定性,目的是让激光雷达系统能够更加适合太空环境,NASA用于测量全球大气风场的星载2μm测风激光雷达预计2020年发射升空。
2001年,CTI公司开始为美国海军研制TODWL机载2μm相干多普勒测风激光雷达[22],用于评估强风条件下海洋和大气之间的动力学和能量交换情况,同时研究水面的反射效应。图12给出了该激光雷达实物照片。
2002年美国CTI公司推出了WindTracer相干多普勒测风激光雷达商业产品[22],实物如图13所示。这是一套可用来测量大气风速、切变风风场和旋风轨迹的激光雷达系统。
2001年,日本三菱电气公司研制了基于Er:Yb玻璃激光器的激光雷达,波长1.54μm,脉冲能量10.9mJ,重复频率15Hz,对应的测速范围是±50m/s[21],实物如图14所示。

图12 TODWL机载2μm相干多普勒测风激光雷达实物图

图13 WindTracer相干多普勒测风激光雷达商业产品实物图

图14 日本三菱电气公司研制的激光雷达实物图
2006年French Aerospace Lab使用光纤MOPA结构完成了1.5μm激光多普勒雷达[15]。光纤激光器输出脉冲能量1mJ,重复频率4kHz,测量范围小于4000m,测速精度达1m/s。
2007年,CTI公司推出了1.6μm的相干多普勒测风雷达[22],该激光雷达采用Er:YAG激光器,脉冲能量4mJ,重复频率500Hz。
2008年美国利用CTI公司的1.6μmWTX-16激光头研制了机载多普勒测风雷达,对台风进行了研究[22]。图15为雷达实物及机载安装图。该激光雷达脉冲能量为1mJ,重复频率为2000Hz,风速测量精度小于1m/s,根据不同的气溶胶条件作用距离可达3km~20km。

图15 CTI公司的机载多普勒测风雷达实物及机载安装图
日本的Mitsubishi Electric公司近年来也开展了1.5μm光纤多普勒雷达的研究[21],2007年该小组研制了8.3μJ@50kHz光纤脉冲激光器,完成了对20m/s的大气风场测量,其测量距离小于1km,测速精度达1m/s。
美国NASA的LaRC一直针对可用于全球三维风场信息测量的星载测风激光雷达进行研究。早在1996年就报道了该雷达的大能量、高效率、高稳定性[26]。它采用紧凑型的2μm激光雷达光源,发射机主要是侧重于可以获得大能量输出的半导体侧面泵浦的Tm,Ho共掺的单纵模激光器,并在LD泵浦2μm种子注入锁定激光器方面做了大量研究工作。2010年,NASA搭建了相干激光雷达DOWN系统,采用两级放大,脉冲输出能量为250mJ,脉宽为200ns,重复频率10Hz。LaRC将2μm测风激光雷达系统安装在NASA DC-8试验飞机上,成功进行了飞行测风试验。2012年将在原有激光器基础上,最终获得脉冲能量400mJ、脉宽180ns、重复频率10Hz的单纵模激光输出。
3温室气体差分吸收激光雷达
差分吸收激光雷达结合了差分吸收探测技术和激光雷达系统的优点,利用待测气体对不同激光波长的吸收系数不同,实现对大气中待测气体浓度的三维探测,并且具有时空分辨率高、探测精度高等优点。将对温室气体主要成分进行探测的差分吸收激光雷达应用于空间平台,形成星载CO2探测激光雷达,可实现对全球范围内CO2浓度和分布的探测,为天气和气候的形成和变化提供数据依据,对灾害性天气和气候进行预报和分析,还可以促进对气候变化、全球碳循环的认知和预测,从而更好地改善地球环境。
目前星载差分吸收激光雷达是一个重要的研究方向。在NASA的火星大气探测方案中,计划采用谐振泵浦Er:YAG激光器同时完成火星大气风场、大气CO2含量以及火星大气气溶胶的探测[27]。美国NASA计划于2013年~2016年发射二氧化碳探测激光雷达卫星ASCENDS,主载荷CO2激光雷达参数指标为:激光脉冲能量24μJ,重复频率10kHz,脉宽10μs,激光波长1572.33nm,望远镜直径20cm。
2010年日本NICT成功使用Ho:Tm:YLF激光器测量到25km范围内的大气CO2含量,并计划将该激光雷达用于国际空间站(International Space Station),展开针对地球大气的探测研究[21]。该激光器激光波长为2.05μm,脉冲能量为80mJ,重复频率30Hz,脉宽150ns,on-line波长2051.004~2051.060nm,off-line波长为2051.250nm。
在ESA的地球大气探测计划中,将分别于2014年和2017年发射MERLIN和A-SCOPE卫星用于探测地球大气CH4和CO2含量[28]。MERLIN卫星使用Nd:YAG激光器经OPO产生波长1.645μm激光,用于探测大气CH4含量。其脉冲能量为9mJ,重复频率50Hz,脉宽130ns,光束发散角0.27mrad(FWHM),online波长为1645.552nm,off-line波长为1645.846nm。
SCOPE则分别使用1.57μm的OPO和2.05μm的Ho:YAG两台激光器同时对大气CO2进行测量[29]。1.57μm激光脉冲能量则为50mJ,重复频率50Hz,望远镜直径1m。2.05μm激光脉冲能量55mJ,重复频率50Hz,望远镜直径为1.2m。图16给出了国外温室气体差分吸收激光雷达CO2探测结果。

图16 国外温室气体差分吸收激光雷达CO2探测结果
2.1.2 陆地、海洋探测激光雷达
1海洋探测激光雷达
国外自上世纪六十年代开始研制激光雷达水深测量系统,经过四十多年的发展,发达国家机载激光雷达海洋探测系统已经进入了实用阶段。其中具有代表性的有:加拿大Optech公司为美国海军研制的SHOALS机载水文勘测系统[30]、美国Kaman宇航公司的鱼眼(FishEye)和魔灯(Magiclantern)[31,32]、加拿大Optech公司研制的ALARMS机载水雷探测系统[33]、澳大利亚的LADS机载海底地貌测绘系统[34]以及加拿大Optech公司为瑞典水文探测部门和瑞典海军研制的HAWK EYE机载水文勘测系统等[35~37]。前苏联开展海洋探测激光雷达研究的时间也比较早,1984年就报道探测到100m的海底;1986年进行了Chaika系统的试验研究;1988年研制成功Chaika -2机载激光雷达;1991年研制成功GOI系统[38]。
ALARMS(Airborne Laser Radar Mine Sensor)系统是加拿大Optech公司、美国Northrop公司开发的蓝绿激光机载探雷系统[33],其原型机在加利福尼亚海岸进行了成功的实验,被认为大大提高了海军探测水雷的能力。另外,经过1987年两伊战争,以及1991年波斯湾战争的实际战争验证,Magic Lantern系统有效地进行了水雷探测,在水雷战争中扮演了重要的角色。舰队司令Capt.Kelly提出,激光水雷探测系统的优点在于,它能在声探测系统失效的区域很好运行。系泊水雷靠近海岸或在浅海里,由于海水移动,也许包含海浪,产生的噪声可能掩盖了声纳探测器信号,而光电探测系统在小于20m深度内,不受这种噪声的影响。
SHOALS(Scanned Hydrographic Operational Airborne Lidar Survey)系统,先后经过二十余年的发展,是目前世界上最为先进的激光雷达海洋探测系统[30]。它具有先进的GPS定位和定高功能,目前最新一代系统采用重复频率为1kHz和10kHz的Nd:YAG激光器,采用绿光和红光共线扫描方式,具有独立的红外和拉曼通道,有5个接收通道,3个用于探测海水界面,2个用于探测海底,增加的647nm拉曼后向散射通道进行海面检测以及海面、陆地的区分。该系统出色地完成了五十多个课题的海洋探测任务,其中包括佛罗里达新航道宾夕法尼亚的普利切岛和墨西哥育卡滩海域的探测任务;它还与超光谱探测设备进行复合,成功探测并识别到了海底沙子、珊瑚、泥浆、不同的水藻等物质,更加说明了SHOALS系统的探测能力优于传统探测方法。图17为SHOALS系统目前最新的CZMIL激光雷达整机系统。

图17 SHOALS系统目前最新的CZMIL激光雷达整机系统图
我国自上世纪八十年代开始进行机载激光雷达的研制[39],而将机载激光雷达应用于海洋探测相对发达国家更为滞后。针对海洋探测目前仍缺乏可以实用的机载激光雷达海洋探测系统,无论是海底地貌测绘,获得海图;还是水下目标探测,例如失事船、障碍物、水雷和潜艇探测等,激光雷达海洋探测系统的开发研制都是十分必要而迫切的。华中科技大学等科研单位开展了机载激光雷达海洋探测系统的初期研究,西安光机所、长春光机所、北京理工大学、华中理工大学、东南大学、北京遥测技术研究所等单位均对水下成像系统进行了研究,正逐步拉近与国际技术的差距[40]。
2陆地地形、森林探测激光雷达
资源载荷一直以被动光学成像载荷为主,后发展为微波SAR成像,2003年美国发射了携带GLAS(地球科学激光高度系统)的ICESAT卫星,开始了星载激光雷达地球三维成像新时代[41]。GLAS激光雷达采用1064nm和532nm两个波长,主要用来探测陆地和冰层轮廓图、云和大气属性以及云层高度和厚度。美国即将于2016年发射第二代ICESAT卫星,即ICESAT2[42],它采用532nm波长的多波束微脉冲激光雷达ATLAS。另外NASA还计划了专门用于森林覆盖测量的VCL激光雷达卫星和全球地形高分辨测量的LIST激光雷达卫星[43]。国外典型的星载地球三维成像激光雷达产品的技术现状如表3所示。

表3 国外典型星载地球三维成像激光雷达[44]

续表
我国中科院上海技术物理所和上海光学精密机械研究所研制了月球探测卫星“嫦娥一号”和“嫦娥二号”[45,46],激光高度计是这两颗卫星的主要有效载荷之一,实现了卫星星下点月表地形高度数据获取,为月球表面三维影像的获取提供服务。通过星上激光高度计测量卫星到星下点月球表面的距离,为光学成像探测系统的立体成图提供修正参数;并通过地面应用系统将距离数据与卫星轨道参数、地月坐标关系进行综合数据处理,获得卫星星下点月表地形高度数据,取得了较好的应用效果。
2.2 空中交会对接
上世纪七十年代美国已经在进行激光交会雷达和光学敏感器等自主交会对接测量设备的研制[47]。前苏联交会对接测量系统基本上采用无线电测量设备——微波雷达,有时也采用闭路电视系统,能在屏幕上给出前方飞行器沿滚动轴的方向图像。为使对接系统更加完善,并且具有更高技术性能,前苏联也将激光技术用于空间交会对接,重点发展激光交会雷达。欧洲空间局虽至今尚未实现在轨交会对接,但自上世纪八十年代初就开始研究自主交会对接测量技术和敏感器,其中中短程采用激光雷达,目前也正在研制激光交会雷达。上世纪八十年代后期日本也开始研制交会对接测量系统和敏感器,主要是扫描式激光雷达。1997年日本发射卫星交会试验系统ETS-Ⅶ,它主要有三个传感器:一个为GPS;一个为近红外激光雷达;一个是交会传感器[21]。激光雷达作用距离在0.3m~660m,采用激光二极管,波长为810nm,输出功率为50mW。可见微波雷达作为远距离交会测量手段比较适合,而在中近距离上采用激光交会雷达则性能更优。
由于近期激光技术的继续发展,采用大功率半导体激光器和改进扫描机构性能,提高跟踪精度以及在目标飞行器上设置协作目标,从而使复合式激光雷达作为交会对接全过程的测量敏感器成为了可能。目前这些敏感器大部分还在试验和研制阶段。表4给出了上世纪八十年代以来交会对接激光雷达敏感器一览表。

表4 上世纪八十年代以来交会对接激光雷达敏感器一览表[48]

续表
空间目标成像探测与航天器着陆导航:
①VTT成像激光雷达
日本VTT电子公司1999年从欧洲航天局获得了一份成像激光雷达研制合同,研制用于行星表面导航与避障的成像激光雷达[49]。该激光雷达作用距离为100m,采用激光二极管,波长905nm,峰值功率150W,脉宽10ns,脉冲重复频率500Hz,帧速率为1Hz,发射光学系统口径13mm,接收光学系统口径25mm,距离分辨率5cm(10m内2cm),重量8.6kg,功耗15.6W。
②火星着陆器激光雷达LAPS
2004年,加拿大Optech公司和MD Robotics公司为火星探测开发了一种用于行星自动着陆的激光雷达(LAPS)[52]。LAPS工作于有动力降落阶段,它具有为着陆器提供自主危险探测和导航的能力。
③XSS-11激光雷达SSLS
XSS-11是美国的一个小卫星演示项目,旨在试验空间目标的探测、跟踪和检查[51]。XSS-11小卫星于2004年7月发射,在轨使用寿命为1年。XSS-11携带有被动式和主动式传感器,其中主动式传感器为MD Robotics公司和Optech公司联合研制的扫描型激光雷达(SSLS)。2006年,美国的DC-X计划已将SSLS激光雷达应用于自动导航着陆原理样机的实验。
④LDRI激光雷达
LDRI是美国Sandia国家实验室采用传统的相位法测距研制的非扫描激光成像雷达,已于2005年应用于航天飞机表面探伤及国际空间站三维成像[49]。
⑤Flash激光雷达
2007年12月,美国NASA公开发布了自动登陆和危险回避项目(ALHAT)的激光雷达招标文件,旨在招标研制用于月球登陆软着陆器的激光雷达[50]。该文件对美国下一步应用于月球着陆的激光雷达指标提出了一些初步要求。由于降落过程时间短,因而要求激光雷达足够快,希望数据更新率能达到30Hz,采用Flash激光雷达体制。
国内中国电子科技集团11所也进行了空间交会对接相关工作[50]。
2.3 军事应用
激光雷达在军事上也有重要的应用,以下仅列举几种典型应用。
2.3.1 侦察用成像激光雷达
激光雷达分辨率高,可以采集三维数据,如方位角-俯仰角-距离、距离-速度-强度,并将数据以图像的形式显示,获得辐射几何分布图像、距离选通图像、速度图像等,有潜力成为重要的侦察手段。
美国雷锡昂公司研制的ILR100激光雷达[50],安装在高性能飞机和无人机上,在待侦察地区的上空以120~460m的高度飞行,用GaAs激光进行行扫描。获得的影像可实时显示在飞机上的阴极射线管显示器上,或通过数据链路发送至地面站。
美国海军陆战队提出,现有手持摄影装置不能满足现代战场的要求,需要一种新型手持成像设备,不仅能提供及时处理的影像,而且能提供定量信息。这种设备必须能由一名海军陆战队队员携带,重量在2.3~3.2kg之间,能安装在三脚架上;系统必须能自聚焦,能在低光照条件下工作;采集的影像必须足够清晰,能分辨远距离的车辆和近距离的人员,而且可先由使用者观看,然后在海军陆战队空-地特遣部队中分发。具体的性能要求是视场15×15mrad,影像分辨率0.15mrad,作用距离1km,距离分辨率15m,拍摄时间1/3s。根据海军陆战队的要求,桑迪亚国家实验室和Burns公司分别提出了手持激光雷达的设计方案[49]。一种是无扫描器的系统,使用闪光灯泵浦Q开关Nd:YAG激光器、数字CCD摄像机和调制像增强器。另一种是扫描型系统,采用二极管泵浦固体激光器、32元雪崩光电二极管、纤维光学中继系统和二元光学扫描器。据称两种方案都能满足要求。
2.3.2 障碍回避激光雷达
许多国家正在研制直升机用的障碍回避激光雷达[53,54]。美国罗斯洛普·格鲁曼公司与陆军通信电子司令部夜视和电子传感器局联合研制直升机超低空飞行用的障碍回避系统。该系统使用半导体激光发射机和旋转全息扫描器,探测直升机前很宽的范围,可将障碍信息显示在平视显示器或头盔显示器上。该激光雷达系统已在两种直升机上进行了试验。
在美国陆军夜视和电子传感器处的指导下,作为陆军直升机障碍回避系统计划的一部分,Fibertek公司研制了直升机激光雷达系统,用于探测电话线、动力线之类的障碍。该激光雷达由传感器吊舱和电子装置组成,使用二极管泵浦1.54μm固体激光器。吊舱中安装激光发射机、接收机、扫描器和支持系统。电子装置由计算机、数据和视频记录器、定时电子系统、功率调节器、制冷系统和控制面板组成。该激光雷达系统安装在UH-1H直升机上。
德国戴姆勒-奔驰宇航公司按照联邦防卫技术合同,研制了Hellas障碍探测激光雷达。该激光雷达是1.54μm成像激光雷达,视场为32o,能探测距离300~500m、直径1cm以上的电线和其他障碍物(取决于角度和能见度)。1999年1月德国联邦边防军为新型EC-135和EC-155直升机订购了25部Hellas障碍探测激光雷达。
德国达索电子技术(dassault Electronique)公司和英国马可尼公司联合研制了Clara激光雷达。这种吊舱载激光雷达采用CO2激光器,能探测标杆和电缆之类的障碍,并具有地形跟踪、目标测距和指示、活动目标指示功能,可用于飞机和直升机。
德国达索电子技术公司、蔡司光电公司和英国GEC—马可尼航空电子公司、马可尼SpA公司联合研制的Eloise CO2激光雷达,是另一种直升机载障碍报警系统,可提前10s提供前方有5mm电缆的报警,使直升机能在恶劣气候条件下作战飞行。
马可尼SpA公司还提供自行研制的Loam障碍回避系统。该系统使用人眼安全激光技术,探测电线、树木、桅杆等障碍。飞行员接收视觉和声音报警,显示器显示障碍的形状、位置、方位和距离。
2.3.3 化学/生物战剂探测激光雷达
化学/生物武器是一种大规模毁伤武器。面对不断扩散的化学/生物武器的威胁,许多国家正在采取措施,加强对这类武器的防御。美国国防部认为,需要能在战场上使用的、快速响应的、灵敏的监视系统,以尽快提供化学/生物威胁的报警。这种系统不同于防空和反潜警戒系统,必须具有搜索、探测、识别、定量化、监测和诊断等功能。激光雷达可用于化学/生物战剂的遥测。每种化学战剂仅吸收特定波长的激光,对其他波长的激光是透明的。被化学战剂污染的表面则反射不同波长的激光。化学战剂的这种特性,就允许利用激光雷达探测和识别之。激光雷达可以利用差分吸收、差分散射、弹性后向散射、感应荧光等原理,实现化学/生物战剂的探测。化学/生物战剂探测激光雷达采用的激光器主要是CO2激光器和Nd:YAG激光器[53]。
2.3.4 水下探测激光雷达
激光雷达具有足够的空间分辨率来分辨目标的尺寸和形状,因而是一种有效的探测水下目标并进行分类的工具。1988年美国“罗伯茨”号护卫舰在阿拉伯湾几乎被廉价的水雷击沉。此后Kaman宇航公司研制了“魔灯”水雷探测激光雷达[55]。该激光雷达使用蓝-绿激光器、灵敏的电子选通像增强摄像机和精确脉冲定时发生器。机载激光器向海面发射激光脉冲,扫描水雷。同时,脉冲定时发生器控制摄像机快门,仅接收特定深度反射的激光能量。在这个深度的目标反射激光而被显现。影像通过数据链路传送给舰船。“魔灯”激光雷达可以在海面以上120~460m高度工作,名义工作高度460m,但低空飞行时分辨率和信噪比较高,致使视场有限。其探测深度最初定为12~61m的浅水区,但根据初步作战评估和不断的研究,调整为包括3~12m的极浅水区和深度不足3m的冲浪区。“魔灯”激光雷达不仅可以自动探测水中目标,而且可以实施目标分类和定位。1988年的样机试验表明,该系统可以迅速探测锚雷,并定位。
海湾战争期间,美国军舰“特里波利”号和“普林斯顿”号被水雷毁伤,使人们将注意力集中到采用新技术的水雷对抗手段上。部署到该地区的“魔灯”水雷探测激光雷达初样机成功地发现了水雷和水雷锚链。1996年美国海军将第一个“魔灯”系统部署到海军航空兵HSL-94预备役中队。目前,该中队有三套“魔灯”系统供SH-2G“超海妖”直升机使用。“魔灯”激光雷达仍属于应急性系统,美国海军计划最终用机载激光水雷探测系统取而代之。机载水雷探测系统在2005年前后开始研制,最终安装在H-60直升机上。
2.3.5 空间监视激光雷达
美国空军在毛伊岛空间监视站利用激光雷达的精密跟踪和高分辨率成像能力,进行远距离探测、跟踪和成像,核查轨道上的卫星。安装在毛伊岛的高性能CO2激光雷达监视传感器系统(也称为“野外激光雷达演示”系统),是一台高功率、宽带、相干激光雷达[53]。该激光雷达是按照一项分四个阶段的计划研制的。第一阶段建造了实验室硬件,在毛伊岛组装了综合激光雷达系统,使用紧凑的脉冲相干CO2振荡器、外差接收器、信号记录器与0.6m激光束定向器耦合,演示了卫星捕获、照明、回波信号探测和信号记录。然后,通过脱机处理,从回波信号中提取距离和距离速率数据,实现了距离-振幅成像。随后的第二阶段,研制了改进的振荡器、接收器、处理器和光束定向器,并将其组合成最终的系统,使系统能力达到在30Hz时输出能量12J。第三阶段在发射机上增加了功率放大器(最后一个主要部件),使系统能力达到30Hz时激光输出能量30J。在第四阶段,系统可以提供高精度位置和速度跟踪,并打算最终测量非美国的航天器的尺寸、形状和取向。按照计划,这台激光雷达将能进行高精度位置和速度跟踪,并提供尺寸、形状和方位信息。
北京遥测技术研究所也开展了军用激光雷达的研究工作,包括天基激光告警激光雷达、海岛监视激光雷达和船载无人机激光雷达。天基激光告警激光雷达用于地基激光武器对卫星攻击的告警,保护己方的卫星安全。海岛监视激光雷达主要用于海上态势感知和海岛的安全防护。船载无人机激光雷达主要用于对远海目标的持续远距离监视。
3 激光雷达的发展趋势
总结国际上激光雷达的发展足迹和历程,归纳、提炼出以下激光遥感技术发展趋势:
①地基-机载-星载激光雷达相结合实现载荷平台一体化
建设地面监测—航空测量—卫星遥感的天空地载荷一体化监测系统。利用地基激光雷达构建地面监测网络系统,结合机载激光雷达和星载激光雷达构建空基测量系统和卫星遥感系统,利用空中和卫星平台有效范围覆盖大的特点,提升大尺度监测能力,精确测量被测目标的全方位连续实时立体化信息。
②多种遥感方式相结合实现复合探测
激光主动遥感与微波遥感、红外遥感之间相比各有优势,微波波束的发散角大,激光发散角小,因此,激光的精度和角分辨率高,而微波的搜索能力强;微波雷达对电磁干扰敏感,在探测地空目标时,回波信号可能被地面的杂波所淹没,而激光雷达抗电磁干扰能力强,它们之间存在着互补性。激光高度计就可以和微波SAR合在一起使用;未来的预警系统倾向于激光主动遥感和红外系统组合使用,先用红外系统大面积搜索,一旦发现可疑目标则通知激光雷达跟踪、测速、测距,如夜晚没有光源照明,热红外成像不能将目标和环境区分开来,如果和激光主动遥感相配合则可以很好地解决这一问题。
③单台遥感设备功能综合化
激光雷达单台设备只测一个参数的情况在将来会越来越少,往往是共用光源与光学系统,尽量从散射和反射回波中获得更多信息,形成带有一定综合性的遥感设备。2001年发射的ICESAT卫星上的GLAS激光雷达,是NASA为测量海冰而设计的主动传感器,主要测量两极地区的冰层,建立高精度的陆地数字高程,同时获得全球尺度的云和气溶胶的垂直剖面,还能进行海表和海洋次表层测量。设想中的导弹预警系统,激光雷达跟踪目标的同时,不断测距和多普勒测速;2005年德国科学家Andreas等提出了四维综合性激光大气雷达,同时用Mie散射测气溶胶、Raman散射测温度以及差分吸收测水汽。
④新型激光器、探测器走向应用
激光遥感技术的重点突破关键技术有:激光器、探测器及探测数据处理技术和反演及其应用。激光器是激光遥感技术的核心及关键技术。按激光雷达所需激光器来划分,可以分为两类激光器,即波长为1μm的Nd:YAG激光器和人眼安全波长1.6μm和2μm的激光器。这两类激光波长可为执行地球科学探测任务、军民两用的化学和生物战剂探测提供所需的主波长。由于激光器性能的提高需要更高的成本,因此目前更多地寄希望于探测器和探测数据处理技术的发展。改进探测器的性能成为当务之急,目前光量子产额约为2%,而对于光子计数而言,光量子产额需要达到30%~50%。激光雷达接收到的回波信息并不能直接体现出被测目标的一些特征信息,需要通过数据反演才能得到我们所需的目标信息参数。因而激光雷达的数据反演一直是国内外研究的一个重要课题。
4 启示与建议
通过上述分析,获得以下几点启示和建议:
①前瞻部署激光遥感技术开发重点方向
NASA及ESA均将激光雷达技术作为未来行星探索任务的使能技术之一,尤其是可实现“距离成像”的三维成像激光雷达技术,将在行星表面辅助着陆和交会对接、自主导航等应用中发挥重要作用。重点开发技术有:用于超高分辨率成像和三维测距的合成孔径成像激光雷达技术。建议我国相关机构面向未来任务需求,前瞻部署激光雷达技术的研究与开发,为我国的深空探索任务做好准备。
②扩展激光遥感技术在我国的应用领域
2009年以来,我国激光雷达研究论文数超过德国和法国位居世界第二,但研究重心仍主要停留在光学基础研究及器件和系统开发上,除气象与大气科学、环境科学与生态两个领域外,其他应用领域的高水平研究成果还不突出。而国际上,激光雷达技术在对地观测及遥感中的应用已全面展开,从气象和大气科学到地质学和地球化学与地球物理学,乃至林学和水资源等众多学科领域遍地开花。建议我国机构充分利用激光雷达这一技术手段,在继续加强其在气象和大气科学、地质学、遥感等领域应用的同时,积极拓展新的应用领域,如天文学与天体物理学、海洋科学等,推动我国相关学科的发展。
③建立产学研用合作发展模式
建立国内产学研用合作发展模式,加强与国内相关高校的合作,了解最前沿的学术动态,时刻跟踪最新技术;加强与用户的交流沟通,了解用户所需所想,进一步改进产品,满足用户的实际需求。
④搭建国际合作平台,快速突破关键技术,实现跨越式发展
为了加快我国激光遥感系统的研制进程,可以采用资助研发和国际引进相结合的模式,搭建国际合作平台,借鉴在激光遥感领域处于世界领先地位并与我国有着良好合作伙伴关系国家的先进技术与经验,快速取得关键技术的突破,实现跨越式发展,形成实用化的激光遥感产品。
[1] 孙景群.激光大气探测[M].北京:科学出版社,1986.
[2] 宋正方.应用大气光学基础[M].北京:气象出版社,1990.
[3] 赵九章.高空大气物理学(上)[M].北京:科学出版社,1965.
[4] 李 然,王 成,苏国中,等.星载激光雷达的发展与应用[J].科技导报,2007,25(14):58~63.
[5] 许春晓,周 峰.星载激光遥感技术的发展及应用[J].航天返回与遥感,2009,30(4):26~31.
[6] 耿 林,张忠萍.国外空间激光引用技术研究进展[J].激光与红外,2010,40(9):919~925.
[7] Weitkamp C.Lidar:Range-resolved Optical Remote Sensing of the Atmosphere[M].Geesthacht:Springer,2005.
[8] Cracknell A P,Hayes L.Introduction to Remote Sensing(2 ed.)[M].London:Taylor and Francis,2007.
[9] 宋小全,郭金家,闫召爱,张凯临,李志刚,刘智深.大气气溶胶光学参数的高光谱分辨率激光雷达探测研究[J].自然科学进展,2008,18(9):1009~1015.
[10] 周 军,岳古明,戚福第,金传佳,吴永华,熊黎明,陈毓红,窦根娣,胡欢陵.大气气溶胶光学特性激光雷达探测[J].量子电子学报,1998,15(2):140~148.
[11] 沈法华,孙东松,王忠纯,薛向辉,陈廷娣,窦贤康.移动式多普勒激光雷达光束扫描及风场反演技术研究[J].光学学报,2012,32(3):1~5.
[12] 刘 君.大气温度及气溶胶激光雷达探测技术研究[D].西安理工大学,2008.
[13] 竹孝鹏,刘继桥,刁伟峰,毕德仓,周 军,陈卫标.相干多普勒测风激光雷达研究[J].红外,2012,33(2):8~12.
[14] 张寅超,李 丹,陈炳龙,陈思颖,陈 和,郭 磐.基于CALIPSO和转动拉曼-米散射激光雷达研究北京地区大气气溶胶特性[J].北京理工大学学报,2013,33(6):634~643.
[15] 王 成,MenentiM,StollM P,李传荣,唐伶俐.机载激光雷达数据的误差分析及校正[J].遥感学报,2007,11 (3):392~396.
[16] 赵一鸣.多波长偏振拉曼激光雷达大气细颗粒物探测[C].2014年大气环境监测技术及应用国际研讨会,2014.
[17] Wintker D,Hostetler C.CALIOP:the CALIPSO Lidar[C].22nd Internation Laser Radar Conference,2004,941~944.
[18] Fisackerly R,Pradier A,Gardini B,et al.The ESA Lunar Lander Mission[C].United States.AIAA SPACE 2011 Conference&Exposition.
[19] Abshire JB.2011-10-20.NASA's Space Lidar Measurements of the Earth and Planets“A brief overview”[C].
[20] Amzajerdian F.2008-07-28.Role of Lidar Technology in Future NASA Space Missions[C].
[21] Araki H,Tazawa S,Noda H,et al.2008-03-10.Present Status and Preliminary Results of the Lunar Topography by KAGUYA-LALTMission[J].Lunar and Planetary Science XXXIX.
[22] Morse B J,Ballard BW,Reed C L B.NASA's Robotic Lunar Lander Project Update[C].United States.AIAA SPACE 2010 Conference&Exposition.
[23] Weidlich K,Rech M,Kallenbach R.Qualification Testing of the Laser Transmitter Part for ESA’s BepiColombo Laser Altimeter(BELA)[C].Proceeding of SPIE 8159,Lidar Remote Sensing for Environmental Monitoring XⅡ.编者:Upendra N.Singh.
[24] 竹孝鹏,刘继桥,刁伟峰,毕德仓,周 军,陈卫标.相干多普勒测风激光雷达研究[J].红外,2012,33(2):8~12.
[25] 张芳沛,薛海中,胡永钊,沈 严,邢宇华,李冬梅,张文平,韩文杰,窦飞飞.相干多普勒测风激光雷达[J].应用光学,2009,30(6):1045~1050.
[26] Molebny V,Kamerman G,Dteinvall O.2010.Laser Radar:From Early History to New Trends[C].Proceeding of SPIE 7835,Electro-Optical Remote Sensing,Photonic Technologies,and Applications IV.编者:Gary W. Kamerman,Ove Steinvall,Keith L.Lewis,Richard C.Hollins,Thomas J.Merlet,Gary J.Bishop,John D. Gonglewski.
[27] 石广玉,戴 铁,徐 娜.卫星遥感探测大气CO2浓度研究最新进展[J].地球科学进展,2010,25(1):7~13.
[28] Bézy JL.2010-10-04.ESA’s Earth Observation Lidar Missions and Critical Technology Developments[C].
[29] Christian J A,Hinkel H,D’Souza C N.2011.The Sensor Test for Orion RelNav Risk Mitigation(STORRM) Development Test Objective[C].AIAA Guidance,Navigation,and Control Conference.
[30] Lillycop W J,Parson L E,Estep L L.Field Testing of the U SArmy Cops of Engineers Airborne Lidar Hydrography Survey System[C].Proceedings U SHydrographic Conference'94,Norfolk USA,1994:144~151.
[31] Ulich B L.[C].U SPateent4862257,1989.
[32] Ulich B L,Keeler R N.[C].U SPateent4964721,1990.
[33] Phillips D[C].ADA107080,1980:419~428.
[34] Penny M F,Abbot R H,Phillips D Met al.Appl Opt[C].1986;25(13):2047~2058.
[35] Koppari K,Karlsson U,Steinvall O.Airborne Sounding in Sweden[C].Proceedings U SHydrographic Conference'94,Norfolk USA,1994:124~133.
[36] Thuresson P.SHOALS-Hawks Eyes,International Laser Bathymeter Seminar[C].Ronneby,Sweden,1994.
[37] Steinvall O,Koppari K,Karlsson U[C].SPIE,1994;2258:392~412.
[38] Abroskin AG,Bunkin A F,Vlasov D V.Natural Experiments on Laser Soundingwith the“Chaika”System[C].Remote Sensing of the Ocean,Moscow:Nauka,1986:23~38 in Russian.
[39] 王泽和.机载激光雷达研制[J].激光与红外,1991,21(4):13~16.
[40] 陈文革,黄铁侠,卢益民.机载海洋激光雷达发展综述[J].激光技术,1998,22(3):147~152.
[41] Yu AW,Stephen M A,Li SX etal..Space Laser Transmitter Development for ICESat-2 Mission[C].SPIE,2010,7578:757809.
[42] AbdalatiW,Zwally H J,Bindschadler R et al..The ICESat-2Laser Altimetry Tmission[J].Proc.IEEE,2010,98 (5):735~751.
[43] Yu AW,Sun X L,Shaw G B et al..Overview of Space Qualified Solid-state Lasers Development at NASA Goddard Space Flight Center[C].SPIE,2009,7193:709305.
[44] 韩 淋.NASA戈达德空间飞行中心未来高分辨率测绘任务及天基激光设备研发进展[C].科学研究动态监测快报空间光电科技专辑,2011,(1):16~22.
[45] 王建宇,舒 嵘,陈卫标,等.嫦娥一号卫星载激光高度计[J].中国科学:物理学力学天文学,2010,40(8):1063~1070.
[46] 叶培建,黄江川,孟林智.嫦娥二号卫星技术成就与中国深空探测展望[J].中国科学:技术科学,2013,43 (5):467~477.
[47] Yu AW,Krainak M A,Harding D Jet al..Spaceborne Laser Instruments for High-resolution Mapping[C].SPIE,2010,7578:757802.
[48] Wang JY,Shu R G,H.Huang et al..Space borne Laser Rangefinder Ranging Sensitivity and Accuracy Analysis [C].SPIE,2010,7807:78070Y.
[49] 倪树新.新体制成像激光雷达发展评述[J].激光与红外,2006,8(9):732~736.
[50] 王存恩.激光雷达在航天器交会对接中的应用[J].红外与激光技术,1991,14(5):6~12.
[51] 王大轶,黄翔宇.深空探测自主导航与控制技术综述[J].空间控制技术与应用,2009,21(35):6~12.
[52] Psiaki M L,Hinks JC.Autonomous Lunar Orbit Determination Using Star Occultation Measurements[C].AIAA Guidance,Navigation and Control Conference and Exhibit 20-23 August2007,Hilton Head,South Carolina.
[53] 倪树新,李一飞.军用激光雷达的发展趋势[J].红外与激光工程,2003,(2):111~114.
[54] 王永仲,编著.现代军用光学技术[M].北京:科学出版社,2007.
[55] JBanic J,S Sizgoric,et al.Scanning Lidar Bathymeter for Water Depth Measurement[J].Proceedings of SPIE,1986,663:187~195.
Application and Development Direction of Lidar
Zhao Yiming, Li Yanhua, Shang Yanan, Li Jing, Yu Yong, Li Lianghai
Compared with the traditional radar,lidar with high measurement precision,fine time and spatial resolution,and largemeasurement range becomes an important active remote sensing tool.Lidar can not only used for precise rangemeasurement,but also accurately measure the angle and realize precise tracking,and in the civilian and military fields it has broad application prospects.
This paper beginswith a brief review of the development process of generating a lidar technology,introduces the concept of lidar system components and analyzes the status and technologies at home and abroad about the atmospheric lidar,land and sea detecting lidar in the field of Earth Science and Applications,air rendezvous docking areas laser technology,and military applications of vestigation imaging lidar,lidar obstacle avoidance,chemical/biological warfare agent detection lidar,underwater detection lidar,and lidar air surveillance.Finally,the development trend and importance of lidar are summarized,and some suggestions are put forward.
Lidar; Application; Development direction
TN957.51
A
CN11-1780(2014)05-0004-19
赵一鸣 1983年生,博士,高级工程师,主要研究方向为激光雷达总体设计。
李艳华 1963年生,研究员,主要研究方向为航天测控通信与飞行器测控设计。
商雅楠 1984年生,工程师,主要研究方向为激光雷达系统设计。
李 静 1985年生,博士,工程师,主要研究方向为激光器设计。
于 勇 1971年生,博士,研究员,主要研究方向为雷达制导及雷达系统。
李凉海 1965年生,研究员,主要研究方向为雷达系统设计。
2014-06-24
猜你喜欢
军事文摘(2024年4期)2024-03-19 09:40:02
军事文摘(2023年10期)2023-06-09 09:15:06
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
科学(2020年6期)2020-02-06 09:00:06
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
光学精密工程(2016年5期)2016-11-07 09:06:14
河北书画研究(2016年2期)2016-08-24 02:14:50
新农业(2016年18期)2016-08-16 03:28:27
