星载GNSS信号接收机的研制思考
2014-08-02 11:50:27刘基余
遥测遥控 2014年6期
刘基余
(武汉大学测绘学院 武汉 430079)
星载GNSS信号接收机的研制思考
刘基余
(武汉大学测绘学院 武汉 430079)
星载GNSS信号接收机能够为在轨航天器提供稳定、高精度的七维状态参数测量,具有广泛的工程实用价值,但需要解决下述研制问题:①细致分析系统间的差异,处理好不同的导航信号之间、时间系统之间和坐标系统之间的差别;②提取卫星导航信号之间的结合点,寻求接收机的公共频率源;③研发内置机内定位星座优选软件,获取较小GDOP值,提高七维状态参数测量精度;④研发星载GNSS信号软件接收机,节省星载硬件设备。
卫星导航信号; 时间系统; 坐标系统; GDOP值; 星载GNSS信号软件接收机
前 言
早在GPS技术问世之初的1982年7月,美国发射的Landsat-D地球资源卫星便开创了星载GPS测量的先例,在Landsat-D卫星上安设了一台GPSPAC GPS信号接收机,其功耗为45瓦,重达18公斤。星载GPS测量的结果不仅验证了GPS用于卫星定轨的可行性,而且证实了星载GPS测量具有下列三点优越性。
①能够精确而自主地测定卫星在轨飞行时的实时位置与速度,甚至姿态参数;
②能够实现在轨卫星的自主导航,显著减少对地面测控系统的依赖;
③能够为星上其它设备提供高精度的时间基准,可取代地面测控系统的时统子系统。
近年来的实际应用证明,从几百公里高的低轨航天器,直到几万公里高的高轨航天器(如地球同步卫星),都能够采用GPS技术进行导航定位测量;即使是航天器的交会与对接、航天飞机的入轨飞行和变轨返航,都成功地应用了GPS技术;美国正在设计研制中的用于取代航天飞机的乘员探索飞行器CEV (Crew Exploration Vehicle),也采用GPS自主导航定位技术。在现今GNSS全球导航卫星系统迅速发展之际,该如何研制精度高且适应性强的星载GNSS信号接收机?笔者作简要论述,供同行研讨。
1 星载GNSS信号接收机的优越性
星载GNSS信号接收机是一部多种卫星导航信号集成应用的星上接收设备,广义而言,它是用一台接收机同时接收、跟踪和测量GPS、GLONASS、北斗、Galileo、QZSS(准天顶卫星系统)和IRNSS(印度区域导航卫星系统)等卫星的导航信号,能够精确地测得在轨航天器的三维位置、三维速度和时间,甚至三维姿态参数,并确保它们达到稳定可靠的高精度。星载GNSS信号接收机相对于用单一卫星星座的GPS或GLONASS信号接收机而言,具有下述优越性。
星载GNSS信号接收机能够消除间隙时段。当用单一的GPS星座作导航定位测量时,对于某地某时也许只能见到4颗GPS卫星,这4颗卫星所构成的几何图形又较差,致使它的三维位置几何精度因子(PDOP)超过6,显著地放大位置和时间误差,这个时段称为“间隙时段”[1]。如果同一台接收机能够同时接收、跟踪、变换和测量GPS、GLONASS、北斗和Galileo等多种卫星的导航信号,则可从几十颗卫星构成的混合星座中选择适宜的卫星,构成定位星座,从而消除上述导航定位测量的间隙时段,以此保证高精度导航定位的连续性和可靠性。图1为2013年8月8日24小时内在武汉地区800km高空处单一GPS星座(共32颗卫星)和GPS、GLONASS、北斗和Galileo混合星座(共76颗卫星)的PDOP值。从该图可见,单一GPS星座的PDOP最小值为1.4左右,最大值为6.80左右,而GPS、GLONASS、北斗和Galileo混合星座的PDOP最小值为0.90左右,最大值为2.20左右,混合星座将使三维位置测量精度提高40%以上。
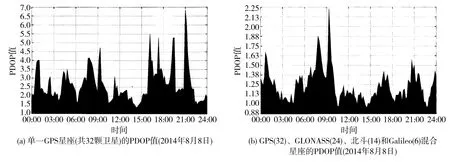
图1 单一GPS星座和GPS、GLONASS、北斗和Galileo混合星座在800km高空的PDOP值
星载GNSS信号接收机能够实现真正的全球连续的精确导航。当用单一的GPS星座作导航测量时,理论上只需观测4颗卫星,但试验结果表明,仅仅观测4颗卫星难以实现连续的精确导航,特别是在高动态的应用场合,运动载体和GPS卫星之间存在着较大的加速度径向分量,易导致接收机跟踪环路的失锁。若采用GPS、GLONASS、北斗和Galileo集成接收机,既可在一天的任何时候接收4颗以上的卫星信号,又可选择径向加速度较小的卫星构成定位星座,从而确保星载GNSS高精度导航测量的连续性。
星载GNSS信号接收机能够以较短的数据采集时间,获得较高的导航定位精度。例如,仅用GPS/GLONASS集成接收机的试验成果表明,用GPS/GLONASS混合星座作导航定位的二维位置精度比用单一星座的二维位置精度高70% (如图2所示);用GPS/GLONASS混合星座作单频差分测量的精度与用单一GPS星座作双频差分测量的精度相似(如图3所示)。
实现上述星载 GNSS测量的优越性,关键在于星载GNSS信号接收机。依笔者之见,星载GNSS信号接收机除了必须具备弱信号捕获测量能力和观测量多等多项基本性能(详见《GPS卫星导航定位原理与方法》§4.7)以外,还需具备下述四个特点。
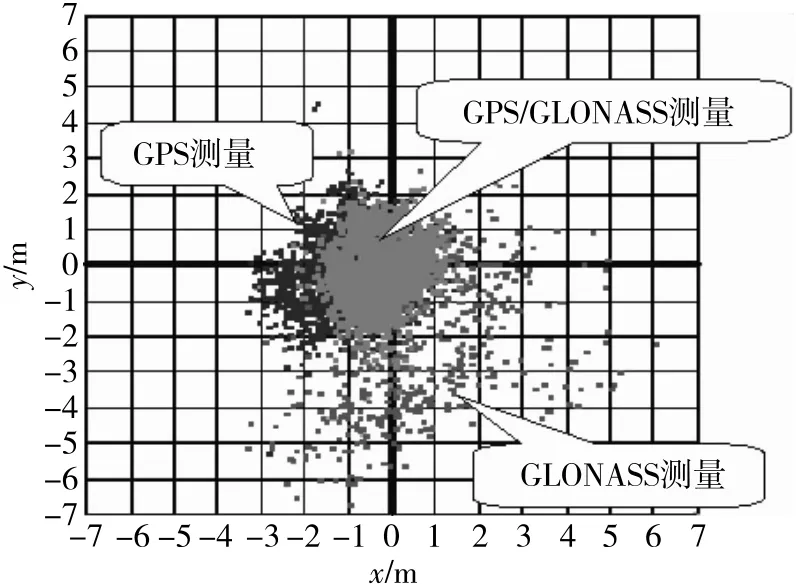
图2 用单一星座和GPS/GLONASS混合星座的二维位置测量精度比较
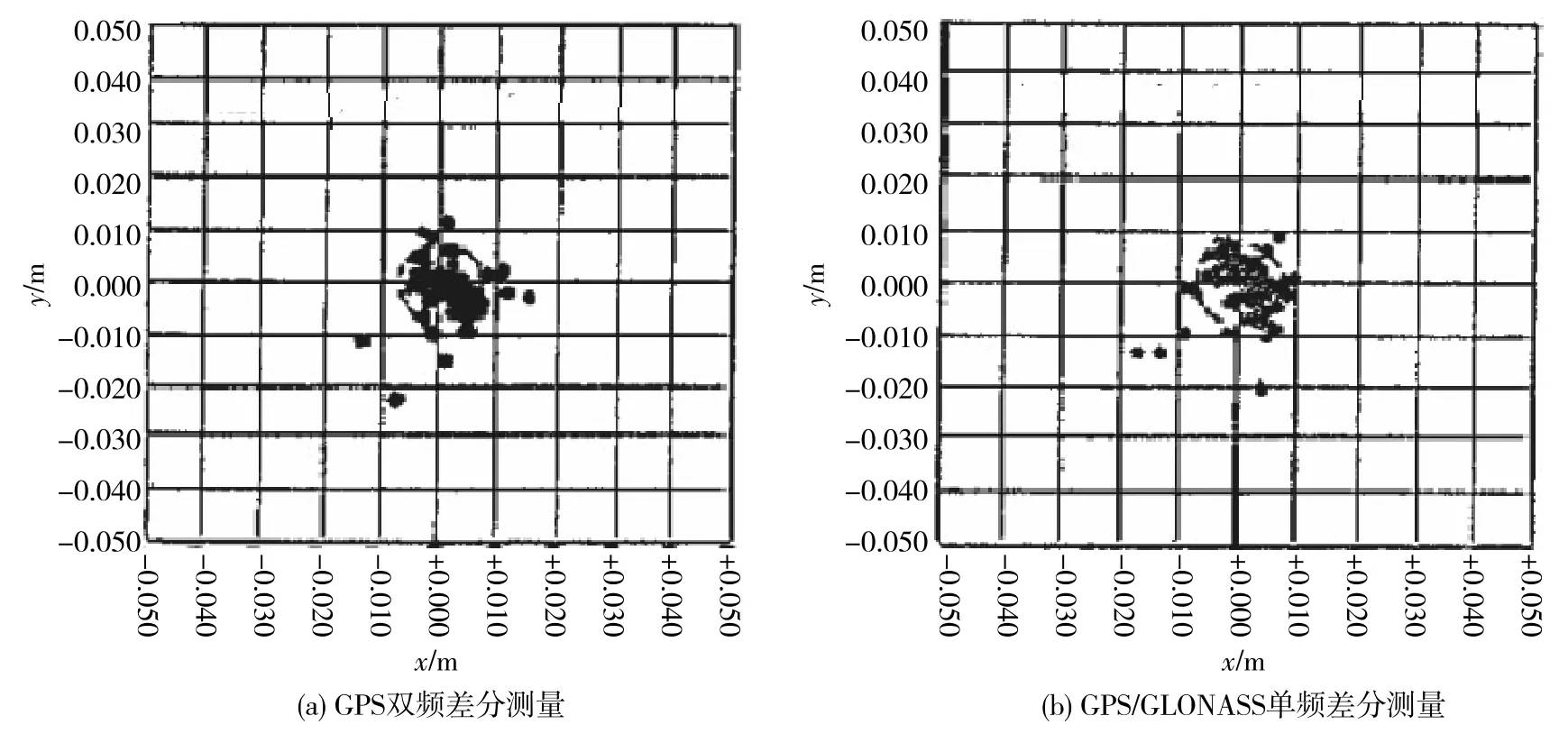
图3 用单一GPS星座和GPS/GLONASS混合星座的二维位置差分测量精度的比较(基线长为3.5km,仅观测10min)
①在秒速十几公里的高动态环境条件下,能够稳定地捕获、跟踪和测量可视GNSS卫星所发送的导航信号;
②具有不低于10Hz的数据更新率,以便获得密度适当的航天器在轨点位;
③具有1s脉冲输出功能,以便为航天器上的所有电子设备建立统一的时间标准;
④在星载GNSS信号接收机内,附设有时元内插器(英文名为Eventmark board),以便将航天器上的附属设备作业时元插入GNSS测量数据流。例如,将航天对地摄影时元插入GNSS测量数据流,用于解算出对地摄影时的三维坐标值(称为摄站坐标),这对我国高分辨率对地观测系统工程的后续发射高分卫星是非常实用的。
2 星载GNSS信号接收机的研制难点
根据美国“GPSWorld”期刊于2014年第一期的统计报告可知,受访的47家生产厂商生产了380种星载GNSS信号接收机,其中,Trimble公司生产的仅重1.75kg的NetR9 TI-1基准接收机具有440个波道,能够接收GPS、GLONASS、Galileo、北斗、QZSS、WAAS(广域增强系统)和EGNOS(欧洲静地卫星导航重叠系统)导航信号以及OmniSTAR VBS、HP和XP差分改正信号,以致GNSS测距码差分定位的二维位置精度能够达到±(25cm+1PPM),高程测量精度为±(50cm+1PPM);GNSS静态定位的二维位置精度能够达到±(3mm+0.1PPM),高程测量精度为±(3.5mm+0.4PPM)。笔者认为,这代表星载GNSS信号接收机现代的高水平性能。如何使我们研制的星载GNSS信号接收机达到这种高性能水平?笔者建议采用“细致分析系统间的差异、巧妙处理系统间信号的差别点、选择和使用最佳定位星座”的破解研制难点之法。
2.1 细致分析系统间的差异
GPS、GLONASS、Galileo、北斗、QZSS和IRNSS等系统,它们的定位原理都是被动式定位,它们的导航信号也有许多共同点[2],这为星载GNSS信号接收机的研制提供了工作基础。细致分析这几个系统,它们也存在着一些重大差异,值得统筹解决。现予以简要论述。
2.1.1 导航信号之异
现代的GNSS导航信号基本上采用三种载波频率,各个载频又调制着多个测距码等信号,此处无法对这几十种导航信号一一予以分析,只能够举例说明。
Galileo信号和GPS信号虽有许多相近之处,两者却亦有重大差别。例如,Galileo L1A/B信号和GPS L1信号虽然共用一个载波频率(1575.42MHz),但其信号分量相差较大。仅就调制方法而言,Galileo L1A/B信号分别采用BOC(15,2.5)和BOC(1,1)调制,而GPSC/A码和P码均采用BPSK调制。因此,对它们的捕获和跟踪就需要采用相适应的软硬件。BOC信号的自相关函数是一种多个峰值函数,主峰和次峰的幅度差异较小,次峰幅度仅小于主峰幅度30%,从而增加了星载GNSS信号接收机分辨主次峰值的难度。若将次峰值当作主峰值进行跟踪测量,就会导致较大的测距误差,损失导航定位精度。因此,需要采用不同于传统BPSK信号捕获跟踪的新技术,以便检测到正确的自相关峰值,实现伪距的精确测量。
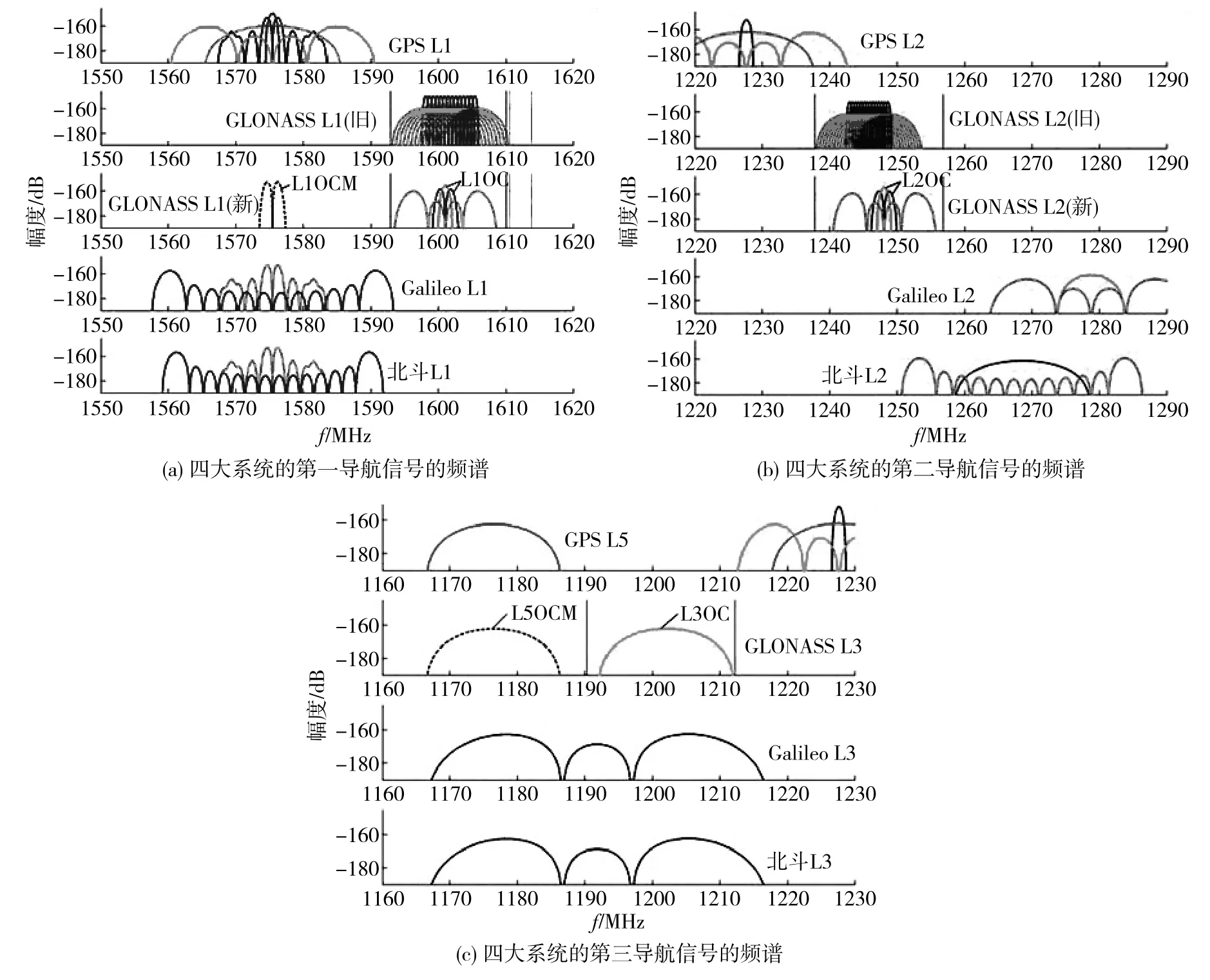
图4 导航信号的频谱
GPS、GLONASS、Galileo和北斗系统的三个导航信号的频谱示于图4。2011年2月26日发射的GLONASS-K1卫星增设了第三个导航定位信号(L3),它的载波频率为1201.74MHz~1208.51MHz;并增设了码分多址(CDMA)信号,其载波频率为1202.025MHz,该CDMA信号简称为L3 OC(O为开放使用信号,C为CDMA)。GLONASS-K卫星发送的L3 OC信号,是采用QPSK调制方式,而且分为数据通道(I)和导频通道(Q);该信号由1202.025MHz的载波、10.23Mchip/s的扩频码和50b/s的导航电文三个部分组成。L3 OC信号是由下述三个步骤生成的:①导航电文编码。数据通道(I)导航电文速率为50b/s,采用标准的(2,1,7)非系统卷积码编码,编码后符号速率为100S/s。导频通道(Q)不包含数据。②扩频码编码。L3 OC的扩频码包括主码和二次编码。主码是长度为10230比特的截短Kasami序列,码元速率是10.23Mchip/s,导频通道(Q)和数据通道(I)的初始状态(IS)分别为nIS=62和nIS=30。导频通道和数据通道采用不同的二次编码,导频通道采用10比特的Neuman-Hoffman(纽曼霍夫曼)码(简称为NH码,NH=1111001010),数据通道采用5比特的Baker(巴克)码(BC=11101);这两个二次编码的字符速率是每个代码字符1ms;③载波频率为1175×1.023MHz=1202.025 MHz,它用BPSK调制生成L3 OC信号。GLONASS L3 OC信号是一种高精度和高可靠性的民用公开服务信号,该信号与GPSL5信号具有相似性,两者的调制方式、电文编码、扩频码和二次编码都有很多相似之处。不过,GPS L5信号需要在2015年才开始由GPSⅢ卫星发送给用户。
2.1.2 时间系统之异
从日常生活到航天发射,从外出旅行到航空航海,人们都感受到了时间准确的重要性。GNSS定时,能够为我们提供简便而高精度的定时测量,用户能够以万亿分之一秒的精确度测定时间,而不需要自己拥有高度精确的原子钟。因此,GNSS定时在下列领域获得了广泛应用:通讯系统、电力网、金融网和其他重要基础设施的精确同步;无线网络更有效地利用有限的无线电频谱;改善网络的管理及其最优化,使可追踪的金融交易和票据的时间标记成为可能;通过“共视定时”技术使国家实验室之间能够传递高精度的时间;甚至采用GNSS定时作为电视播出系统精确的时间基准,实时地调整系统时钟。
不过,值得我们特别注意的是:各个卫星导航系统所采用的协调世界时,是由该研发国家所属的天文台测定的,相互之间存在微小差异。例如,GPS的UTC(USNO)与GLONASS的UTC(SU)之间相差±1μs左右;其它卫星导航系统所用的UTC如下:日本QZSS系统用UTC(NICI);Galileo系统用的UTC,是德国UTC(PTB)、英国UTC(NPL)和意大利UTC(IEN)等欧洲国家多个UTC实验室的UTC平均值,记作UTC (K)。我国北斗卫星导航系统的时间系统是北斗时BDT(Beidou Time),其秒长取为国际单位制SI秒,起算时元为2006年1月1日00时00分00秒协调世界时(UTC),BDT是一种连续时间的时间尺度,通过设在中国科学院国家时间服务中心(NTSC)的标校站作BDT与UTC(NTSC)的时间比对,从而将BDT溯源到UTC(NTSC)。BDT与UTC(NTSC)的偏差保持在100ns以内。BDT的时间系统与GPS时一样无闰秒。BDT与国际原子时(TAI)存在33s的偏差,亦即BDT+33s=TAI。北斗时与中国军用时频中心(CMTC)的时间进行比对,得知BDT相对于UTC(CMTC)的偏差小于20ns[3]。需要特别注意的是:目前北斗卫星RDSS导航电文给的时间,不是UTC,而是北京时间,它的起算时元为2000年1月1日00时00分00秒(北京时间)。
GNSS卫星时钟改正,是每一颗GNSS卫星的时钟相对于GNSS时系的差值。由于相对论效应,卫星时钟比地面时钟走得快,每秒约差448皮秒(每天相差3.87×10-5s)。因此,GNSS卫星的基准频率都需要做相应改正。例如,为了消除相对论效应的影响,GPS卫星就必须将其时钟的10.23MHz标称频率减小到10.22999999545MHz的实际频率。虽经过了这种改正,但是,还需考虑相对论效应所产生的时间偏移并非常数的问题,对于某一颗给定偏心率e的GPS卫星,一阶相对论效应改正如式(1)所示。

此外,GPS各颗卫星时钟相对于GPS时间系统的偏差误差,亦需加以改正,其值为

式中,tOC为导航电文第一数据块的参考时刻,a0为相对于GPS时系的时间偏差(钟差),a1是相对于实际频率的偏差系数(钟速),a2为时钟频率的漂移系数(钟速变化率,即钟漂),这些系数分别由第9字码和第10字码给出。三个时钟多项式系数a0、a1、a2总称为时钟参数,且知GPS工作卫星的钟差和钟速最小,铯钟优于铷钟。根据每颗卫星的时钟改正Δts和一阶相对论效应改正ΔtR,可将每颗卫星的时间(ts)换算为统一的GPS时间[1]

各颗GPS卫星的GPS时间还可依据卫星导航电文提供的相关参数,换算成UTC时间。
由上述GPS时间系统改正之例可见,星载GNSS信号接收机在归一化时间系统时间时,应该首先将各颗GNSS卫星的时间经过各自的卫星时钟改正,进而换算到各自卫星导航系统的UTC时间系统,然后,还需要对不同的UTC时间做归一化处理,致使GNSS测量结果处于相同的时间系统。图5所示的星载GNSS信号接收机的时间测量图解表明,仅对两个不同的卫星导航系统(如第1、2个系统)而言,所测得的GNSS信号传播时间就不相同(以tm1和tm2示之),需要对它们做归一化处理,才能够获得精确值。
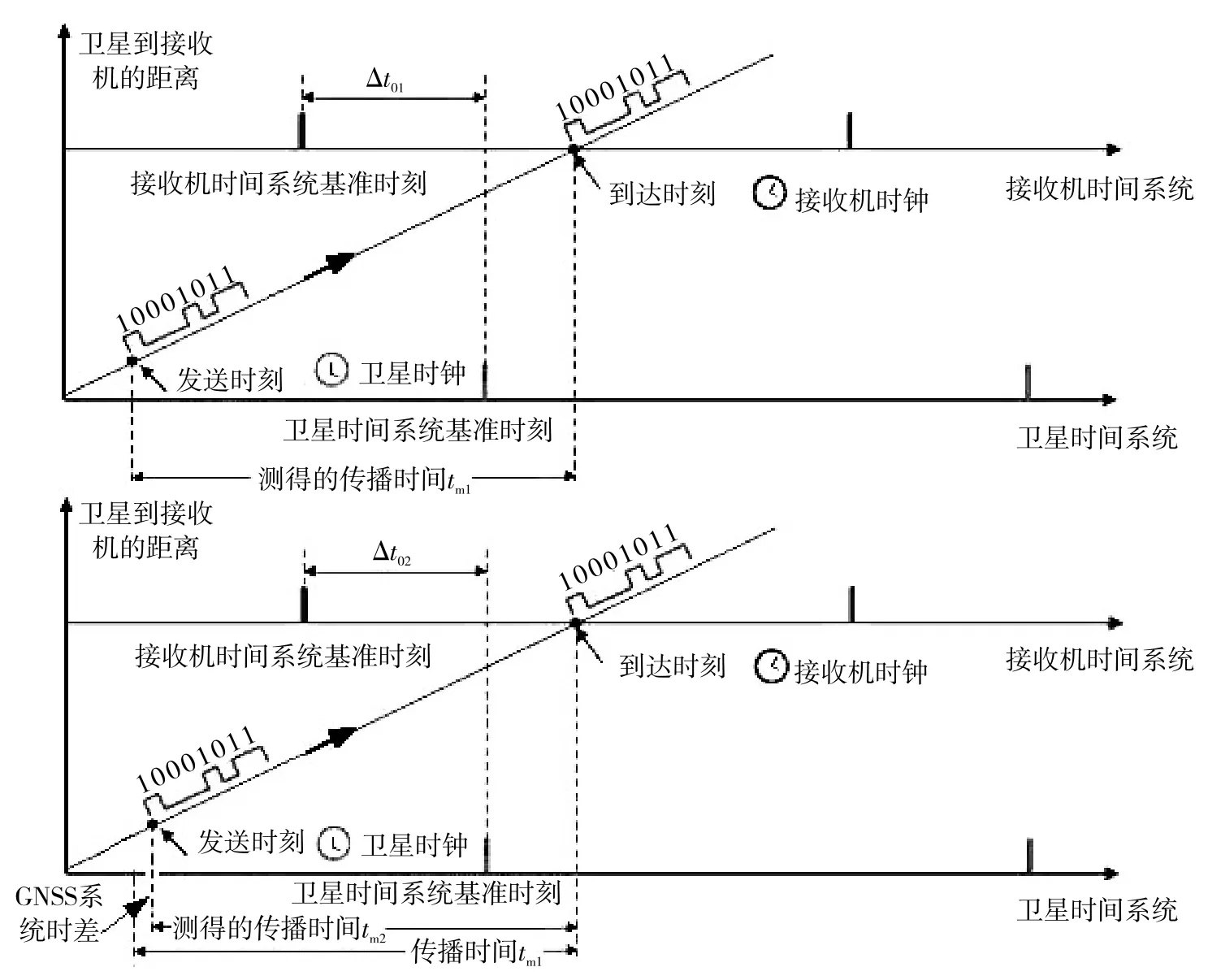
图5 星载GNSS信号接收机的时间测量图解
从图5可见,星载GNSS信号接收机所测量的GNSS信号从卫星到达接收机的时间是

式中,Δt为GNSS信号从卫星到达接收机的真实传播时间,Δt0为卫星时间系统与接收机时间系统之间的时间差异。
由式(4)可知,若要精确测得卫星和接收机之间的真实距离(亦称为站星距离),除了必须化解时间偏差Δt0以外,还需要归一化处理系统间的时间差。值得特别注意的是,±1ns的时间测量误差,将引起±30cm的站星距离测量误差。因此,时间换算是研制星载GNSS信号接收机的大问题,必须认真予以解决。
2.1.3 坐标系统之异[4]
1978年2月22日第一颗GPS试验卫星的入轨运行,开创了以导航卫星为动态已知点的无线电导航定位的新时代。GNSS卫星是环绕地球运行的,它的运行轨道不断地通过地球的质心。为了确切地表述作为动态已知点的导航卫星,必须建立一个以地球质心为原点的大地坐标系。例如,GPS全球定位系统采用WGS-84世界大地坐标系(World Geodetic System 1984),GLONASS全球导航卫星系统采用PZ-90.02地心地固基准坐标系(PZ-90.02 Earth-Centered Earth-Fixed reference frame),北斗卫星导航系统采用2000中国大地坐标系(CGCS2000,亦称2000国家大地坐标系),Galileo全球导航卫星系统采用GTRF大地基准坐标系(Galileo Terrestrial Reference Frame)。由此可见,坐标系是卫星导航系统的重要组成部分,没有高精度的坐标基准,就不可能提供高精度的导航定位服务。这需要遵循一定的“建系”原则,使得所建立的坐标系误差对导航卫星星历精度的影响能够忽略不计。对于星载GNSS信号接收机的研制者而言,应该充分分析它们的差异,予以归一化处理。
北斗卫星导航系统采用2000中国大地坐标系,它是通过全国GPS一、二级网,国家GPSA、B级网和中国地壳形变监测网的共2518点经联合平差得到的(平差数据截至2001年底)。依据GJB6304—2008《2000中国大地测量系统》所述,联合平差分两步进行:第一步,将中国地壳运动观测网络的数据与全球100多个IGS站的数据(H文件形式)进行联合平差,平差中将47个IGS核心站在历元2000.0的ITRF97坐标和速度施以1σ约束,使中国地壳运动观测网络纳入ITRF框架,该网络的平差坐标的平均中误差为σx=0.070cm,σy=0.110cm,σz=0.090cm,水平速度误差为1~4mm/a;第二步,将4个网的单时段基线解进行整体平差,此时固定IGS站、基准网和基本网的站坐标,对区域网站的纬度、经度和高度坐标分别给予5mm、5mm和10mm的约束,以保证平差坐标体现的框架对准ITRF97。通过整体平差得到2000国家GPS大地网的坐标精度:坐标平均中误差 σx= ±0.84cm、σy= ±1.82cm、σz=±1.30cm,σB= ± 0.40cm,σL=±0.52cm,σh=±2.31cm;位置平均中误差σp=±2.42cm;基线长度(不计短于20km的基线,平均长度为106km)平均误差±0.03×10-6km。CGCS 2000是一种右手地固正交坐标系,其原点和轴向的定义是:原点在地球的质量中心,Z轴指向国际地球自转及参照系服务(IERS)参考极(IRP)方向,X轴为IERS参考子午面(IRM)与通过原点且同Z轴正交的赤道面的交线,Y轴与Z、X轴构成右手正交坐标系,CGCS 2000坐标系和GPS系统所用的WGS-84(G1150)坐标系是相容的。计算结果表明,与CGCS 2000椭球体等体积的球半径是 6371000.7900m,与 CGCS 2000椭球体等面积的球半径为6371007.1809m。
CGCS 2000椭球和WGS-84椭球之异,仅椭球扁率f有微小差异。椭球扁率之差df(=fCGCS2000-fWGS-84=1.643484×10-11)将导致同一点位在两个坐标系内的大地坐标产生差异,也导致正常重力产生差异。经过实算数据可知:①df不引起大地经度变化;②df引起大地纬度的变化范围为0(赤道和两极)至0.105mm(B=45°);③df引起大地高的变化范围为0(赤道)到0.105mm(两极);④df引起椭球面上正常重力的变化范围为0(两极)到0.016×10-8m·s-2(赤道)。在当前测量精度水平(坐标测量精度为±1mm,重力测量精度为±1×10-8m·s-2)条件下,由于两个坐标系的椭球扁率之差导致同一点在WGS-84坐标系和CGCS 2000坐标系内的坐标变化和重力变化是可以忽略不计的。因此,我们认为,在坐标系的实现精度范围内,CGCS 2000坐标和WGS-84(G1150)坐标是一致的,而且一般不需要做CGCS 2000坐标和WGS-84(G1150)坐标的变换。
但是,PZ-90.02坐标系与WGS-84坐标系之间,就存在坐标变换问题。因为在1982年10月前苏联发射第一颗GLONASS卫星时,仅有6颗GPS试验卫星在轨运行,苏联人无法利用GPS试验卫星测定大地控制网,所以需要独立自主地为GLONASS系统建立地心坐标系,于是他们采用了如表1所示的4个不同于 WGS-84椭球的椭球基本常数。依据“GLONASS ICD 2008 Edition 5.1”所述,改进的PZ-90.02坐标系仍旧使用表1所示的椭球基本常数,笔者将它称为“PZ-90.02椭球”。现行的在轨GLONASS卫星导航电文均使用PZ-90.02坐标系,故对PZ-90坐标系与WGS-84坐标系之间的差异及其坐标变换问题不予介绍。
经实用研究,PZ-90.02坐标系与WGS-84坐标系及ITRF2000坐标系之间,只存在坐标变换的平移参数,而不存在坐标变换的旋转参数和尺长变化因子,因此从PZ-90.02坐标(以m单位)变换成WGS-84坐标(以m单位)或者变换成ITRF2000坐标(以m单位)均用下式

从WGS-84坐标(以m单位)变换成PZ-90.02坐标(以m单位)则用

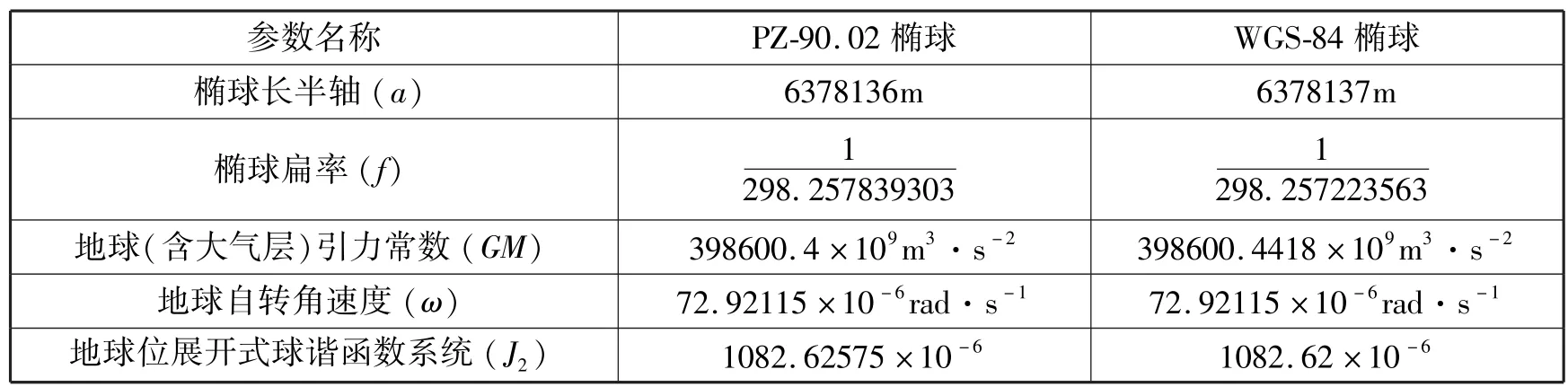
表1 PZ-90.02和WGS-84的椭球基本常数比较
2.2 巧妙处理系统间信号的差别点
若要求同一台接收机既能接收和测量GPS信号,又能接收和测量GLONASS、北斗、Galileo等导航信号,必须巧妙地处理它们导航定位信号的相异处。从研制接收机的角度来看,首要之举是寻求接收机的公共频率源。现以接收和测量GPS/GLONASS信号为例[1],予以说明。
所有GPS卫星均有两个相同的载波频率(1575.42MHz和1227.60MHz),而各颗GLONASS卫星载波频率是随着卫星编号不同而相异的,且知第j颗GLONASS卫星的两个载波频率分别为

式中,j=1,2,3,…,24;f1=1602.5625MHz;Δf1=0.5625MHz;f2=1246.4375MHz;Δf2=0.4375MHz。
从上可见,GPS/GLONASS集成接收机的最基本要求是,必须具有一个联系四种不同载波和四种不同伪噪声码的公共频率源,以便采用GPS/GLONASS混合定位星座(如由3颗GPS卫星和2颗GLONASS卫星构成),共同测定动态用户的七维状态参数(三维位置、三维速度和时间),亦能适宜于采用一种星座作导航定位测量。为此,现在分析两种卫星信号的频率关系。
从式(7)可知,第j颗GLONASS卫星的载波频率为
这个老陈啊,都躺在医院里了,还口齿牙硬。当我告诉老陈他被撞后是楼上的那个女人打的120时,老陈的脸再一次红了,吭哧了半天,才说那天他见到那个女人后,就把那条内裤拿给她,谁知她不承认是自己的。老陈说他问遍了其他的人家,大家都说不是自己的,所以他认定是那个女人的。谁想老陈塞给那个女人,那个女人又塞给他,一来二往,老陈的手就触到了那个女人不该触的地方。那个女人反应也快,抬手就给了老陈一耳光。打过之后,那个女人才意识到自己有些过分了。

例如,当j=1时,第1颗GLONASS卫星的载波频率分别为

式(8)表明,只要能够获得0.5625MHz和0.4375MHz的信号,便可通过倍频器和分频器获得各颗GLONASS卫星的载波。GLONASS卫星的时钟频率为5.11MHz(其稳定度为3~5×10-13),笔者推论,GLONASS卫星的载波频率是用下列倍频和分频方法获得的。以第1颗GLONASS卫星的载波频率为例
5.11MHz→(×225)→(÷2,73)→(÷2,7)→0.5625MHz→(×2849)→1602.5625MHz;
5.11MHz→(×225)→(÷2,73)→(÷2,9)→0.4375MHz→(×2849)→1246.4375MHz。
依式(8),按上列倍频和分频步骤,则可从5.11MHz的钟频获得48种载波频率。对于 GPS/ GLONASS集成接收机而言,若采用5MHz钟频,则可按分频和倍频方法,获得GPS/GLONASS信号的载波频率和伪噪声码的频率。
按上述倍频和分频步骤,并考虑到式(7),即可从5MHz钟频获得48种载波频率。所有的GLONASS卫星都采用相同的PRN码,其频率分别为
5MHz→(÷8,5)→(×7,9)→7.875MHz→(×73,2)→1149.75MHz→(÷9,25)→5.11MHz(它是P码的码频);5MHz→(÷8,5)→(×7,9)→7.875MHz→(×73,2)→1149.75MHz→(÷9,25)→5.11MHz→(÷2,5)→511kHz(它是C/A码的码频)。
对于GPS信号而言,两个载波和两个伪噪声码之间具有如表2所示的频率关系。由表可见,只要从5MHz钟频获得10.23MHz,便可按表2所示频率关系获得各个频率。用5MHz钟频获得10.23MHz的分频和倍频过程如下
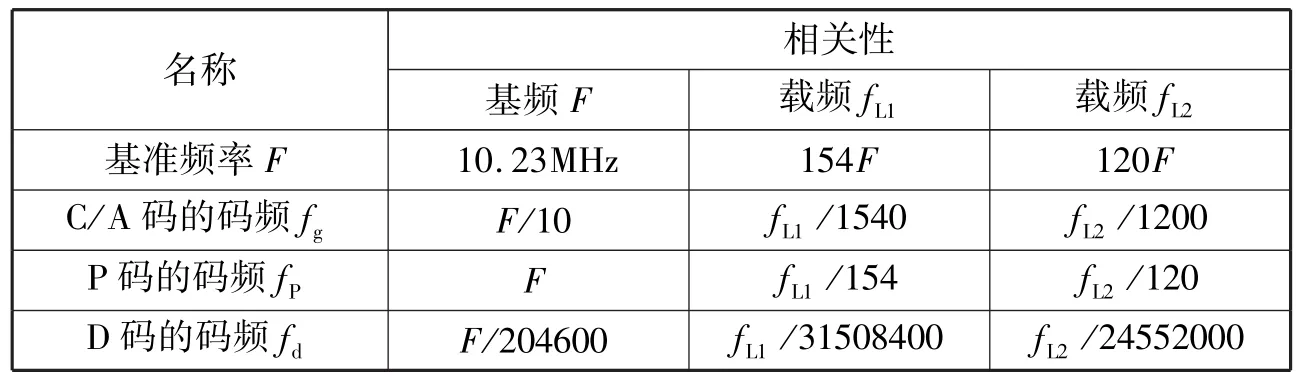
表2 GPS信号的频率关系
综上所述,只要按照上述倍频和分频方法,便可用一个5MHz钟频信号获得GPS和GLONASS信号的近百种频率。一旦星载GNSS信号接收机选定了中放级数及其中频,便可同机接收和测量许多种卫星导航信号,从而实现高精度的导航定位测量,这对星载GNSS信号接收机的研制是很有效益的。
此外,GNSS弱信号捕获算法也值得重视。就GPS弱信号捕获算法而言,现已研究和实践了非相干累加捕获算法、差分相干累加捕获算法和广义差分相干累加捕获算法。因此,瑞士u-blox公司在一块面积比指甲盖还要小的5×6×1.1mm3的印刷电路板上,集成了一台完整的GPS信号接收机,它能够在GPS信号强度仅为-162dBmW的环境中,实现用户的三维位置定位,即使只能够观测一颗GPS卫星也可以进行精密时间测定。这是值得我们认真研究的。
2.3 选择和使用最佳定位星座
GNSS定位星座是用户在时元t与所观测到的GNSS卫星构成的几何图形,若只观测4颗卫星,该图形就是一个星座四面体,它对导航定位精度的影响可以从用户位置矩阵导出。GNSS用户的位置误差包括两大类型:其一是GNSS卫星信号的测距误差Covδ¯ρ;另者为GNSS定位星座的几何结构[(Gu)-1]。后者叫作几何精度因子,记作GDOP(Geometric Dilution of Precision),它对测距误差起着“放大”的作用。学者们给出下列五种定义[1]。
①几何精度因子(GDOP)

②三维位置几何精度因子(PDOP)

③平面位置几何精度因子(HDOP)

④高程几何精度因子(VDOP)

⑤时间几何精度因子(TDOP)

上述各个几何精度因子对用户位置测量精度的损失如下:

式中,mρ为用户至GNSS卫星的距离测量误差。
从上述论证可见,GNSS定位星座和用户构成的几何图形越好,GDOP就越小,它对用户位置测定精度的损失就越小。因此,优选GNSS定位星座,是获取高精度导航定位的有效方法之一。研究表明,GDOP与星座四面体的体积成反比(如图6所示),故应选择体积较大的GNSS定位星座与用户构成的多面体,以便获得较小的GDOP值,减少几何精度因子对用户位置测定精度的损失。
预计2015年初在轨运行的导航卫星将达到90颗,而到2020年则多达140余颗导航卫星在空飞行;如此之多的导航卫星,用户在任一时元都能够观测到十余颗GNSS卫星。例如,目前能够为用户提供导航定位服务的 GPS/ GLONASS卫星共达55颗,任一天的24小时内,能够观测到13~18颗卫星。如果在所研制的星载GNSS信号接收机中设置定位星座优选软件,则能够从几十颗可视卫星中选择数量适当又能构成最佳定位星座的卫星,从而获得较小的GDOP值,进行观测和定位解算,如此可获得显著的精度增益。从某种意义说,它比硬件优化设计的效益要高一些。
2.4 星载GNSS信号接收机的软件化[5]
自1980年第一台商品GPS信号接收机问世以来,GPS信号接收机不断更新换代,特别是20世纪90年代第一春以来,由于微波集成电路和计算机技术的迅速发展,致使GPS信号接收机日新月异。虽然GPS信号接收机的种类如此之多,但是从仪器结构的角度来分析,可概括为天线单元和接收单元两大部分。对于大多数的非便携式的GPS信号接收机而言,它的两个单元被分别装成两个独立的部件,以便天线单元能够安设在运动载体或地面的适当点位上,接收单元置于运动载体内部或测站附近的适当地方,进而用长达10m~100m的天线电缆将两者联接成一个整机,仅由一个电源对该机供电。
具有三十余年使用历史的现行GPS信号接收机,面临两大方面的挑战:①GPS现代化需要的信号扩大;②在轨飞行的导航卫星日渐增多,到2020年,将有140余颗导航卫星在空飞行。这给现行GPS信号接收机提出一个重大的改型问题:能否仅用一个天线单元,接收、跟踪、变换和测量多种卫星导航定位信号?软件无线电技术的发展为解决这个难题奠定了技术基础,它的核心技术是用宽频带无线接收机来代替原来的窄带接收机,将宽带的A/D和D/A变换器尽可能地靠近天线,从而尽可能多地采用软件来实现电台的功能。基于软件无线电技术的设计,软件化的星载GNSS信号接收机(简称为星载GNSS信号软件接收机)基本构成如图7所示。
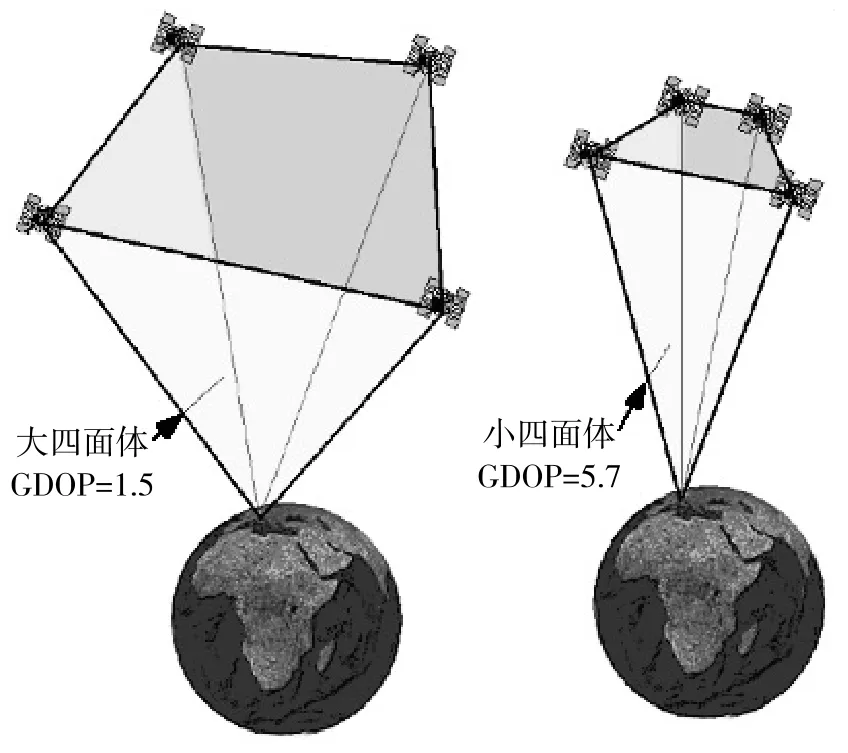
图6 GDOP值随着四面体的大小而变化

图7 星载GNSS信号软件接收机的基本构成
星载GNSS信号软件接收机的优点是:
①便于更新换代。星载GNSS信号软件接收机,是一种基于软件无线电技术的卫星信号接收设备,它采用通用的硬件天线单元,利用软件编程实现GLONASS、Galileo、北斗、IRNSS、QZSS、GPS L5、L2-C和L1-C等信号的导航定位。相对于现行GPS信号接收机而言,星载GNSS信号软件接收机的更新换代时间短、成本低。
②适应软件无线电设备的发展。自20世纪90年代初期以来,无线电设备正处在由硬件为主体到软件化的大变革时代,星载GNSS信号软件接收机能够适应这种大变革的发展,与软件无线电设备集成一体,从而获得更加广泛的应用。
③便于研发新型的卫星导航信号接收机。星载GNSS信号软件接收机关键在于如何用软件实现GNSS信号的捕获与跟踪,它能够充分发挥软件作用,验证新卫星导航信号的可用性。
④便于航天器的集成应用。当航天器使用GNSS时,接收机能够精确测定航天器在轨飞行的实时位置、速度和姿态,能够实现在轨航天器的自主导航,为航天器上的其它设备提供高精度的时间基准。用于航天器的低功耗星载GNSS信号软件接收机,不仅能够达到上述应用目的,而且能够在与其它设备共用一台电子计算机的情况下,充分发挥GNSS测量数据的作用。
相对于现行GPS信号接收机而言,星载GNSS信号软件接收机主要是研制软件化的用于捕获、跟踪GNSS信号的相关器和导航算法。在现行GPS信号接收机中,导航算法和PVT(位置、速度、时间)信息应用,已有成熟的软件产品可供借鉴,因此星载GNSS信号接收机软件化关键是用于捕获、跟踪GNSS信号的相关器软件化。GNSS信号的捕获,主要有下列方法:
①串行搜索算法,它是一种逐一预置多普勒频移和对测距码作相关运算的逐步逐行搜索算法,也是现行GPS信号接收机广泛采用的GPS信号捕获法。其优点是算法简单、容易实现,缺点是捕获时间长。例如,若多普勒频移搜索步长为1kHz,C/A码相位搜索步长是一个码元宽度,则需要进行21483次相关运算才能够捕获到GPS信号。
②并行频率空间搜索算法。它的基本方法是用离散傅立叶变换将原本在时域中进行的多普勒频移搜索过程转换到频域下进行,并将多普勒频移搜索过程作并行化处理。其优点是捕获速度快,只需要对1023个不同C/A码相位进行步进搜索,而不需要像串行搜索那样对不同的多普勒频移值也进行步进搜索。但缺点是每次循环都要进行一次离散傅立叶变换,算法复杂度增加。
③并行码相位空间搜索算法。它的基本方法是用环形相关技术来进行接收码与本地码的相关运算,而不是通过改变本地码的码相位来进行搜索捕获,亦即通过离散傅立叶变换将时域下接收码与本地码的相关运算转换为频域下接收码与本地码共轭信号的乘法运算,进而用离散傅立叶逆变换将结果转换到时域中来实现GPS信号捕获。它的优点是并行码相位搜索算法使搜索循环数进一步减少,只需要对21个不同的多普勒频移进行搜索,每次相关计算仅需要进行一次离散傅立叶变换和一次离散傅立叶逆变换,捕获速度明显提高。其缺点是算法复杂度高。
从图7可见,星载GNSS信号软件接收机更适合于航天器的广泛应用,因其软件单元能够与其它星载设备共用一台电子计算机,既能够节省硬件资源,又能够充分发挥GNSS测量数据的作用,很值得我们研发应用。
3 结束语
20世纪80年代初期,第一台实用的星载GPS信号接收机重达18公斤,三十余年后的今天,星载GPS信号接收机可能比它轻达100倍。现代的GPS信号接收机,主要包括接收天线、射频前端、数字基带处理器、接收机处理器和导航处理器等部件,它们的作用分别是捕获可视GPS卫星的导航信号、跟踪它们的运行、测量所需要的导航定位参数、提取卫星导航电文、计算用户七维状态参数。随着微电子技术的迅速发展,常将前一、二两个部件集成为天线模块,而将后三者集成为接收单元模块,再用这两种模块组装成一台接收机。例如,采用ublox CAM-M80 GNSS天线模块(仅为9.6×14.0×1.95mm3)和UBX-M8030接收单元模块(仅为17.0×22.4×2.4mm3)(如图8所示)集成一台接收机,能够接收和跟踪GPS、GLONASS、北斗、QZSS和SBAS(星基增强系统)信号进行导航定位测量。如果仿照上述天线/接收单元模块,研制星载GNSS信号接收机,那将发展成为一种弹星多用设备,开创GNSS航天应用的新天地!

图8 现代GPS信号接收机的天线/接收单元模块
相对于用单一卫星星座的接收机而言,星载GNSS信号接收机具有实现真正的全球连续性的高精度导航等优点,但同时也需要认真破解星载GNSS信号接收机的研制难点。为此,笔者仅仅从GNSS系统的研究角度,建议研制者细致分析系统间的差异,巧妙处理系统间信号的差别点,选择和使用最佳定位星座,采用星载GNSS信号软件接收机。但是,如果不能很好地解决各星座之间的差异,特别是时间系统之异,所研制的星载GNSS信号接收机将不及用单一星座的星载GPS信号接收机,会适得其反!
例如,一种在互联网上广泛宣传的由一个“国家北斗重大专项承担单位”研制的XXXXXX-B1B3GG三模四频卫星导航接收机板,其性能介绍曰,“该芯片能够达到的精度指标是,水平位置精度为BeiDou/ GPS 5米(CEP),GLONASS 10米(CEP),BeiDou+GPS+GLONASS 10米(CEP);垂直位置精度为BeiDou/ GPS 10米(CEP),GLONASS 15米(CEP),BeiDou+GPS+GLONASS 15米(CEP)”。由此可知,该芯片用单一星座(GLONASS)和用三星座(BeiDou+GPS+GLONASS)所得到的三维位置精度是完全相同的!那么,还有必要采用三星座(他们称之为“三模四频”)做导航定位测量吗?仅仅以PDOP值而言,三星座(BeiDou+GPS+GLONASS)的PDOP值也比单一星座(GLONASS)的PDOP值小得多,以致用三星座(BeiDou+GPS+GLONASS)的定位精度要高于用单一星座(GLONASS)的定位精度,绝不可能两者相同。由此可见,本文所论述的破解星载GNSS信号接收机研制难点之法是值得研制者认真考虑的。
此外,研制高精度星载GNSS信号接收机并非仅有上述几大注意点,还要针对需求,合理选择观测值,选择功能强和运行快的接收机内置软件等一些问题需要我们认真思考[6],并予以解决。
还要特别关注的是,BOC调制虽然能够实现GNSS共用相同的载波频率,从而有效地分离各自的测距码,互不产生干扰,但是BOC信号的自相关函数是一种多峰值函数,主峰和次峰的幅度差异较小,次峰幅度仅小于主峰幅度30%,这增加了GNSS导航信号接收机分辨主次峰值的难度。BOC信号的自相关函数(ACF)不仅具有多峰性,而且边峰随着调制阶数的增加而增加,接收机在捕获BOC信号的同步过程中很容易误锁到它的相关函数边峰上,从而产生模糊性,增加了捕获和跟踪的难度。一旦发生误锁,跟踪环路将产生几十米甚至上百米的测距误差,这对于星载GNSS信号接收机来说是不能容忍的。因此,需要采用不同于捕获跟踪传统BPSK信号的新技术,以便检测到正确的自相关峰值,实现伪距的精确测量,这是研制星载GNSS信号接收机时必须要认真解决的重大问题之一。
[1]刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,2014.
[2]刘基余.BOC调制打通共用载频的坦途——GNSS导航信号的收发问题之一[J].数字通信世界,2013,(8):38~43.
[3]刘基余.北斗卫星导航系统的现况与发展[J].遥测遥控,2013,34(3):1~8.
[4]刘基余.全球导航卫星系统的坐标系作用与应用问题[J].数字通信世界,2012,(12):53~58.
[5]刘基余,田云辉.GPS信号接收机的软件化研究[J].黑龙江工程学院学报,2007,21(3):1~6.
[6]刘基余.攻占GNSS高动态高精度测量制高点的思考——关于北斗卫星导航信号的一项应用建议[J].遥测遥控,2014,35(2):1~8.
Development Thinking on Satellite-borne GNSS Signal Receivers
Liu Jiyu
The satellite-borne GNSS signal receivers can measure 7-dimensional status parameters with stability and high accuracy for the in-orbit spacecrafts and have a wide practical range of engineering value,however,it is need to solve carefully for the following research questions:① to analyze in detail the differences between the constellations,and it is necessary to handle carefully the differences between different navigation signals,timing systems and coordinate systems;② to extract the junctions between satellite navigation signals for seeking the public frequency source of the receivers;③to develop the built-in software for the receivers that is used to select an optimum positioning constellation,so as to get a smaller GDOP value,improving the accuracy of 7-dimensional status parameters measured;④ to develop a satellite-borne GNSS signal software receiver,so as to reduce the satellite-borne hardware equipment.
Satellite navigation signal; Timing system; Coordinate system; Satellite-borne GNSS signal software receiver
P228.4
A
CN11-1780(2014)06-0001-12
刘基余 现任武汉大学测绘学院教授/博士生导师,兼任美国纽约科学院(New York Academy of Sciences)外籍院士、中国电子学会会士。主要研究方向是 GNSS卫星导航定位/卫星激光测距技术,已在国内外30余种中英文学术期刊上发表了250余篇相关研究论文,独著了(北京)科学出版社于2013年1月出版发行的《GPS卫星导航定位原理与方法》一书。主要业绩分别载于美国2001年出版发行的《世界名人录》(Who'sWho in the World)、美国2005年出版发行的《科技名人录》(Who's Who in Science and Engineering)和2007年中国科学技术协会出版发行的《中国科学技术专家传略》工程技术编(电子信息科学技术卷2)等五十多种国内外辞书上。
2014-08-15
猜你喜欢
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
中等数学(2017年2期)2017-06-01 12:21:50
健康女性(2017年3期)2017-04-27 21:34:31
儿童故事画报(2016年5期)2017-02-07 20:15:30
都市丽人(2016年12期)2016-12-14 09:54:15
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04