变速变桨风力机的自适应变桨及转矩控制
2014-07-25 10:08杜静文薄程谢双义金鑫倪小伟
电源技术 2014年10期
杜静,文薄程,谢双义,金鑫,倪小伟
(重庆大学机械传动国家重点实验室,重庆400030)
变速变桨风力机的自适应变桨及转矩控制
杜静,文薄程,谢双义,金鑫,倪小伟
(重庆大学机械传动国家重点实验室,重庆400030)
针对风力机特性仿真结果的不准确性,风力机在运行过程中运行参数的变化导致最初选定的名义桨距角可能不是最优值,以及传统变桨可能导致电机转矩波动过大的问题,提出自适应变桨控制策略和线性二次型调节(linear quadratic regulator,LQR)转矩控制策略。以5 MW变速变桨风力发电机组为验证对象,使用Matlab/Simulink和FAST软件进行联合仿真,仿真结果表明所提出的控制策略能很好地解决桨距角最优值的确定以及在额定风速以上电机转矩波动过大的问题。
变速变桨;自适应;线性二次型调节
风能作为一种绿色和可再生能源正受到人们越来越多的重视。早期设计的风力机大多数是定速的,即风力机的转速是固定的,而现在风力机逐渐趋于变速运行,这是因为变速风力机能在更大程度上捕获风能,而且在大多数的变速风力机中,叶片的桨距角是可以调节的,通过叶片的变桨动作可以控制风力机的运行状态。
当风力机运行在额定风速以下时,传统方法是将叶片的桨距角设定在一个固定值上,在风速变化的情况下,控制系统可以使桨距角从这个固定值开始变化,从而控制风力机的发电功率和叶轮转速。能够使风力机的气动效率最优的桨距角叫做最优桨距角,目前有很多种确定这个值的方法和模型,但这些方法和模型往往存在一些误差。另外,在实际制造和安装风力机的过程中都会或多或少存在误差,使风力机不能从风中捕获最大功率。当风力机运行在额定风速以上时,传统的控制策略是采用恒功率控制[1],但这可能在一定程度上增大电机转矩的波动,使风力机的安全性降低,还会增加风力机的制造成本。因此控制风力机的转矩和变桨动作,对风力机的设计来说是一项很重要的任务。
1 风力机空气动力学特性分析
当风穿过叶轮旋转平面时,由于风轮不可能吸收所有的风能,因此会存在一个效率问题,在风力机中叫做风能利用系数,用p表示,它是叶尖速比和桨距角的函数[2],可以表示为:


式中:ω为叶轮旋转角速度;为叶轮半径。
使用WT-Perf[3]软件可求得p曲面,如图1所示。从图中可以看出,当叶尖速比和桨距角都取某个特定值时风能利用系数才可能会最大。
2 变速变桨风力机的传统控制策略
2.1 变速变桨风力机的运行区间
变速变桨风力机的运行区间一般可以分为3个,如图2所示。
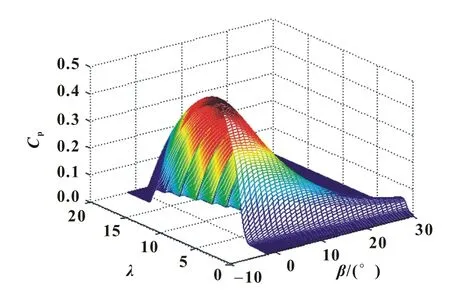
图1 变速变桨风力发电机组功率运行曲线
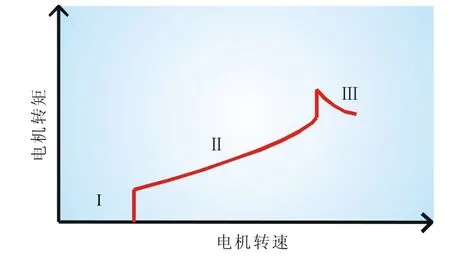
图2 变速变桨风力机的运行区间
区域1表示启动区,此时风力机并没有启动;区域2表示低于额定风速区,在此区域内的控制目标是尽可能使风力机风能利用系数最大,此时的桨距角等于最优桨距角*,为一定值;区域3表示的是高于额定风速区,在此区域内一般采用恒功率控制策略,同时对叶片进行变桨以防止叶轮超速运行。
2.2 变速变桨风力机的传统转矩和变桨控制


当风力机运行在区域3上,为了防止发电功率及叶轮转速超过额定值,对叶片进行变桨动作。传统的变桨控制器采用PI控制技术和增益调度技术[4-6]来对叶片的变桨动作进行控制。
3 新型变桨控制策略
3.1 自适应变桨控制
当风力机运行在区域2上时,桨距角固定在恒值上,这个恒值一般通过仿真得到,但由于仿真过程中可能存在一些误差,导致得出的桨距角可能并不是最优的。另外,在实际安装的风力机中,由于安装误差等因素也可能对风力机的运行参数产生影响,此时如果桨距角的最优设定值没有发生相应改变则可能会使其风能利用系数降低,而自适应变桨控制就可以解决这个问题。
自适应变桨控制器使用离散的爬山法来改变桨距角的值,从而使风力机的气动效率最大化。式(5)~(7)表示的是自适应变桨控制的基本算法。


3.2 基于LQR的变桨控制策略
线性二次型调节(linear quadratic regulator,LQR)是现代控制理论中发展最早也最为成熟的一种状态空间设计方法,它以状态空间形式的线性系统为对象,以对象状态和控制输入的二次型函数为目标函数。通过构造反馈增益,在较低的控制成本下实现原系统较好的性能指标[9]。
假定有如下线性时不变系统:

构建目标函数:

由最优控制理论知,反馈增益矩阵由式(12)计算:


在此基础上可构建反馈法则:

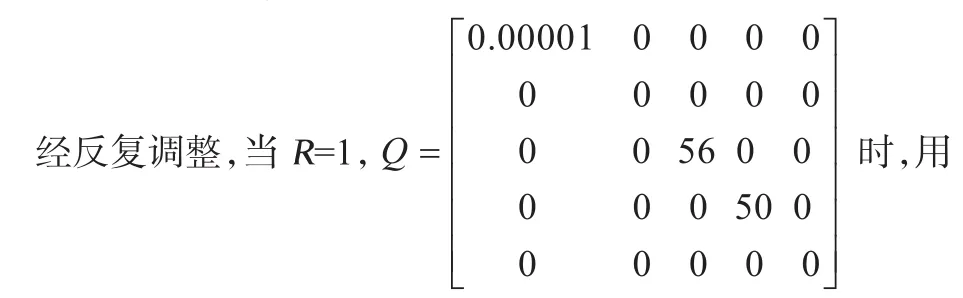
Matlab LQR程序计算得到的闭环极点为-3.623±14.79,-4.3701±4.787,以及-3.897。所生成的增益矩阵为:

4 仿真分析
本文选择美国能源实验室提供的5 MW风机作为仿真模型,其叶轮半径约63m,轮毂中心的高度是90m。借助FAST与Matlab进行联合仿真,所搭建的Simulink模型如图3所示。
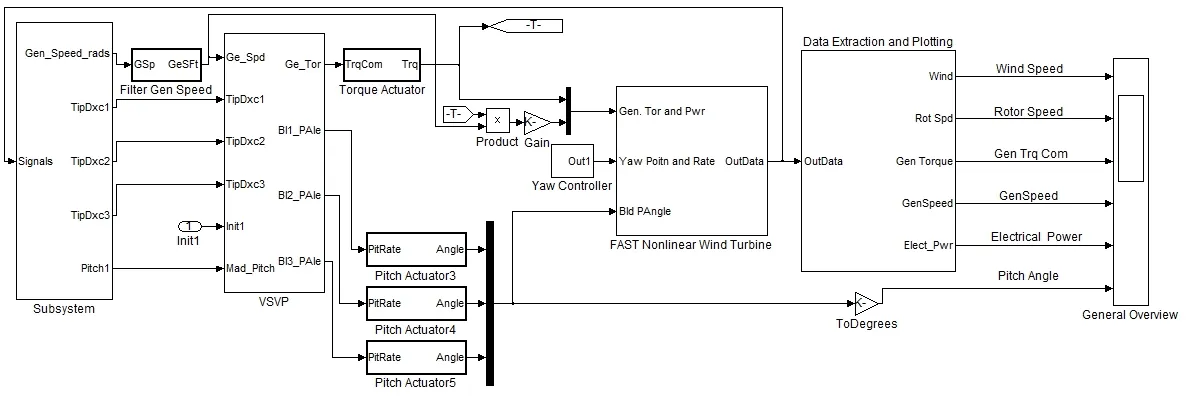
图3 Simulink仿真模型
在8m/s的常风条件下对自适应变桨控制进行仿真,其桨距角和叶轮功率系数的仿真结果如图4和图5所示。可以看出,桨距角起始角度约为4.5°,当桨距角变为0°时叶轮功率系数最大,约为0.47。
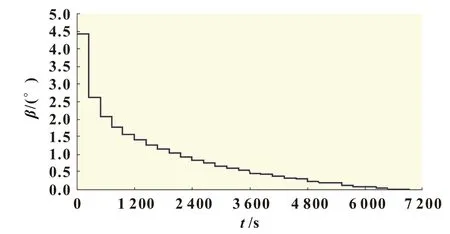
图4 在恒风速下桨距角的自适应变化结果
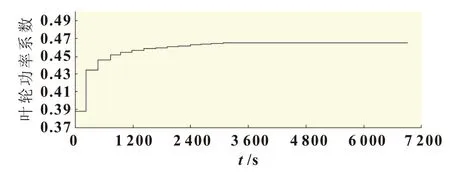
图5 在恒风速下叶轮功率系数的变化结果
选用18m/s的湍流风,此时风力机进入变桨控制阶段,自适应变桨不再起作用。图6表示在两种变桨控制策略下高速轴扭矩的仿真结果对比。从图6中可以明显看出,在LQR变桨控制策略下,高速轴扭矩的波动以及峰值都有明显的减小。
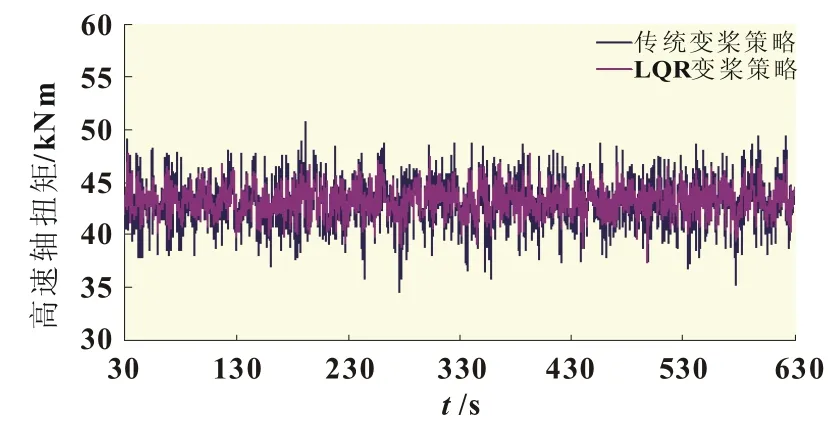
图6 在湍流风下的高速轴扭矩对比
5 结论
分析了变速变桨风力机的气动特性,针对仿真软件的不准确性,风力机运行参数变化导致起始设定桨距角不能使风机气动效率最优,以及传统变桨可能使转矩波动过大的问题,提出了自适应变桨控制和LQR变桨控制策略,仿真结果表明:自适应变桨控制策略能够使风力机找到最优桨距角值,而LQR控制策略可以在一定程度上降低高速轴转矩的波动及峰值。
[1]叶杭冶.风力发电机组的控制技术[M].北京:机械工业出版社,2002:80-90.
[2]VAN D H E L,SCHAAK P,VAN E T G.Wind turbine control algorithms(ECN-C-03-111)[R].Petten,Netherlands:Energy Research Centre of the Netherlands,2003.
[3]BUHL M L.2004 WT_PERF user′s guide[R].Golden,Colorado, USA:National Renewable Energy Laboratory,2004.
[4]LESCHER F,ZHAO J Y,BORNE P.Robust gain scheduling controller for pitch regulated variable speed wind turbine[J].Studies in Informatics and Control,2005,14(4):299-315.
[5]BOSSAYI EA.Bladed for windows usermanual[M].England:Garrad Hassan and Partners Ltd,2005.
[6]王江.带增益调度的风力发电变桨距控制研究[J].电源技术应用,2009,12(3):8-11.
[7]BOSSAYI EA.Bladed for windows usermanual[M].England: Garrad Hassan and Partners Ltd,2005:114-122.
[8]BURTON T,SHARPE D,JENKINS N,et al.Wind energyhandbook [M].New York:Wiley,2001.
[9]薛定宇.反馈控制系统设计与分析[M].北京:清华大学出版社,2000:298-299.
Adaptive pitch and torque control of wind turbines
DU Jing,WEN Bo-cheng,XIE Shuang-yi,JIN Xin,NI Xiao-wei
For the inaccuracy of the simulation,results in the characteristics of wind turbines and its changing operating parametersmay lead to the initial selected nominal pitch angle not an optimal value,and the traditional pitch control could lead to the problem of excessive generator torque fluctuation,an adaptive pitch and a LQR(linear quadratic regulator)torque control strategy were proposed.With a 5 MW variable-speed variable-pitch wind turbine as an object for study,Matlab/Simulink and FAST software co-simulation were used.The simulation results show that the proposed control strategy is a good solution to determine the optimal pitch angle and the problem of excessive torque fluctuation above rated wind speed.
variable-speed variable-pitch;adaptive;LQR
TM 315
A
1002-087 X(2014)10-1904-03

2014-03-05
国家科技支撑计划项目(2009BAA22B02);国家自然科学基金项目(51005255);教育部高等学校博士学科点科研基金项目(20090191120005)
杜静(1964—),女,江西省人,博士,教授,主要研究方向为风力发电机控制策略。
猜你喜欢
电力系统自动化(2023年3期)2023-02-27
水利科学与寒区工程(2022年11期)2022-12-05
电力科学与工程(2022年9期)2022-10-10
电力建设(2022年7期)2022-07-04
通信电源技术(2020年17期)2020-12-28
东方汽轮机(2020年3期)2020-11-04
哈尔滨轴承(2020年1期)2020-11-03
昆钢科技(2020年4期)2020-10-23
水资源开发与管理(2019年8期)2019-08-24
通信电源技术(2016年1期)2016-04-16