基于Ansoft的永磁悬浮直线导轨平台的设计及磁力分析
2014-07-20 09:14:14张海龙张坚孟庆涛邹文张钢
轴承 2014年5期
张海龙,张坚,孟庆涛,邹文,张钢
(上海大学 机电工程与自动化学院,上海 200072)
永磁悬浮支承技术是磁悬浮支承技术的一种,根据Earnshaw定律[1],只用永磁悬浮支承无法实现稳定的全永磁悬浮,因此需要同时采用辅助支承。所用的辅助支承不同,永磁悬浮机构的特点也不同。相比主动磁悬浮技术,永磁悬浮技术具有结构简单、成本低、无需电控系统、结构尺寸小和无需润滑密封等优点。而相比常规的滚动与滑动轴承,它具有微摩擦和寿命长等优点,成本甚至接近于滚动支承,具有很大的发展前景[2-5]。
目前,对永磁悬浮轴承的研究较多[2-8],而对永磁悬浮导轨的研究却很少。在此提出了2种永磁悬浮支承的直线导轨平台方案,拟用在航母所用的电磁弹射器上。对这2种方案进行了详细说明和承载能力及刚度的计算,并对比了2种方案各自的优缺点和适用场合。这种永磁悬浮直线导轨平台除了可应用在电磁弹射器上,也可以用在其他需要直线运动的场合,如机床导轨等。
1 设计方案
弹射器是航母的重要部件,对航母的战斗力具有重要的影响。目前,最为先进的是美国用于下一代福特号航母上的电磁弹射器,采用了“大功率直线电动机驱动技术+飞机轮子支承”方案,文中驱动技术借鉴美国方案,也采取大功率直线电动机驱动方案,但支承改为磁悬浮支承技术。由于本方案支承方式与美国方案不同,研究对象是永磁悬浮导轨支承平台,所以体积、重量比美国的均大大缩小且不成比例。所提出的“大功率直线电动机驱动技术+永磁悬浮导轨支承平台”方案若能成功使用将会改进电磁弹射器的性能。
方案如图1所示,其中左侧是没有采用磁悬浮支承技术的美国方案,右侧是采用永磁悬浮导轨支承的方案。
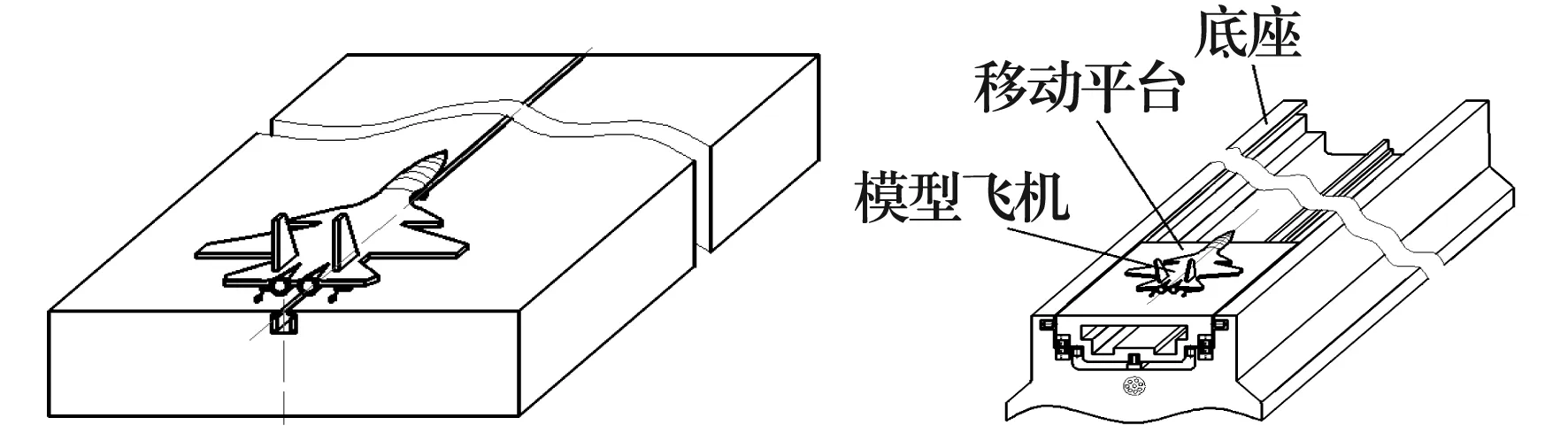
图1 磁悬浮支承的电磁弹射器方案
1.1 4磁条方案
4磁条方案的原理及平台受力情况如图2所示。

图2 4磁条永磁导轨的截面图
此方案中,平台和底座上各装有2根磁条,磁条充磁方向为竖直方向。磁条间的初始气隙为5 mm。底座上的2条条形磁铁与平台上的2条磁铁磁极相反从而产生承载的斥力。另外下部还安装有直线电动机和2组滚轮。其中一组滚轮为侧向辅助支承,另一组为竖直方向上的辅助支承。Fz1与Fz2为平台所受磁斥力,Fz3与Fz4为滚轮所受的力,F为平台的自重与外载荷(包括直线电动机竖直方向很小的分力)的合力。假设平台稳定,则有
Fz1+Fz2=F+Fz3+Fz4。
(1)
当F较小时,磁力Fz1+Fz2为初始气隙5 mm时的磁力,此时滚轮和平台底座接触受力,平台在垂直方向没有完全悬浮。当F较大时,5 mm气隙所产生的磁力Fz1+Fz2不足以承载,平台会下降,此时,竖直方向起辅助支承作用的滚轮会与底座上的面分离,滚轮不再起支承作用,由此可得
Fz3+Fz4=0,
(2)
此时平台在垂直方向为完全磁悬浮支承,摩擦阻力最小。平台下降时,随着平台下降距离Δz的减小,磁力Fz1+Fz2会变大,到某一位置时平台会重新平衡。此时有
F=Fz1+Fz2。
(3)
1.2 8磁条方案
8磁条方案的受力情况如图3所示。
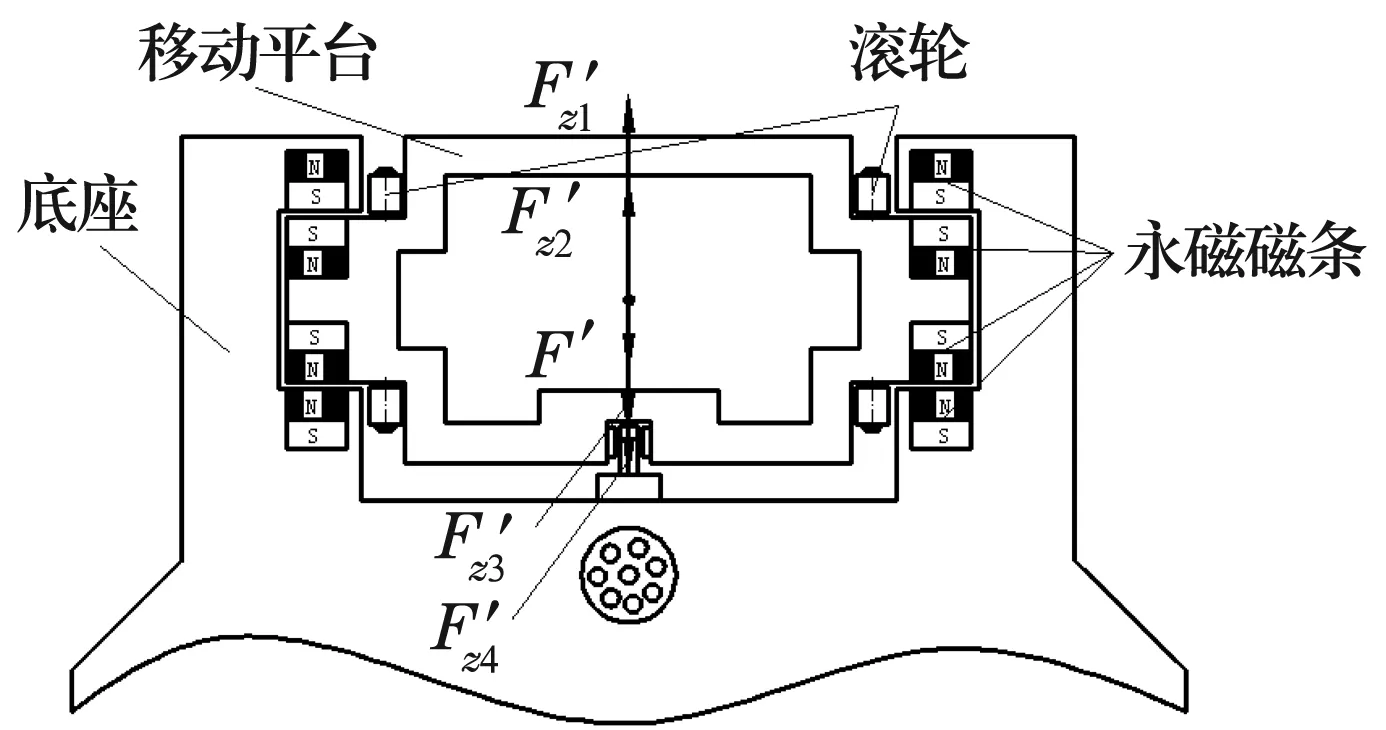
图3 8磁条永磁导轨的截面图

(4)
当平台处于中间位置时,上下气隙相等,则有
(5)

(6)
1.3 方案对比
对比2种方案可得:
(1)4磁条方案只有在一定外载荷下,平台在垂直方向才能完全悬浮;而8磁条方案在没有外载荷时,平台在垂直方向也可以完全悬浮。
(2)在同样的结构参数和气隙条件下,4磁条方案节省磁性材料,占用空间小,且承载力大。
由以上分析可以看出,2种方案各有优缺点,适用于不同的场合。
2 力学分析
2.1 磁场和磁力分析理论基础
选用电磁场有限元分析软件Ansoft Maxwell v14.0进行磁力磁场的计算。Maxwell是电磁场有限元分析最常用的软件之一,基于Maxwell电磁场方程组进行计算分析,不仅功能强大,也可以很好地控制计算精度。在网格划分时,除了可以采用有限元网格自适应划分技术,也可以手动划分。软件提供了多种网格参数控制方法,可以有效地控制网格的大小,这对计算精度非常重要。
对于静磁场的磁力,需要求磁场分布,然后在此基础上求磁力和力矩。Maxwell的静磁场求解器根据安培定律和高斯磁通定律计算

(7)
(8)
计算磁力和力矩采用虚位移法,永磁体磁力的计算公式为[9]

(9)
(10)
式中:L为运动方向的位移;Wm为磁场能量;B为磁通密度;H为磁场强度;V为被求磁力物体的体积。
三维静磁场的边界条件可以直接采用系统默认:物体间交界面的边界条件为自然边界条件,即跨越物体之间界面磁场强度H的切向分量和磁感应强度B的法向分量是连续的,并且满足[9]
Ht1=Ht2+Js,
(11)
Bn1=Bn2,
(12)
式中:Ht为分界面处磁场强度的切向分量;Bn为分界面处磁通密度的法向分量;Js为表面电流密度。
外边界条件为诺依曼边界条件:磁场H与表面边界相切,强制磁场强度的法向分量为0。
虚功法计算精度高[10],而Ansoft中又可以控制迭代精度,从而可以保证计算的准确性。
2.2 承载能力和刚度的分析
永磁体磁条材料采用各向异性的烧结钕铁硼,充磁方向上的矫顽力Hc=907 000 A/m,相对磁导率μr=1.067,剩余磁通Br=1.21 T。平台上的短磁条尺寸为40 mm×40 mm×400 mm,底座上的长磁条尺寸为40 mm×40 mm×2 000 mm,磁条之间的初始气隙取c=5 mm。计算时平台处于中间位置。
利用Ansoft进行建模及计算:网格划分设置磁条细化;求解区域设为200%;迭代计算误差1%,最大迭代次数20次;单元加密比例为30%;边界条件采用系统默认;选择平台上的所有磁条计算其受力,所得力即为平台所受的磁力之和。建模时不考虑除磁条之外的其他结构对磁场和磁力的影响,这是因为这些结构采用铝合金或陶瓷等材料,对磁场基本无影响。计算过程中发现划分的四面体单元个数为142 755~151 285,迭代8~10次即可满足1%的收敛要求。网格划分情况如图4所示,由图可知网格很密,比较理想。用主流配置的计算机完成一次计算需要10 min左右。
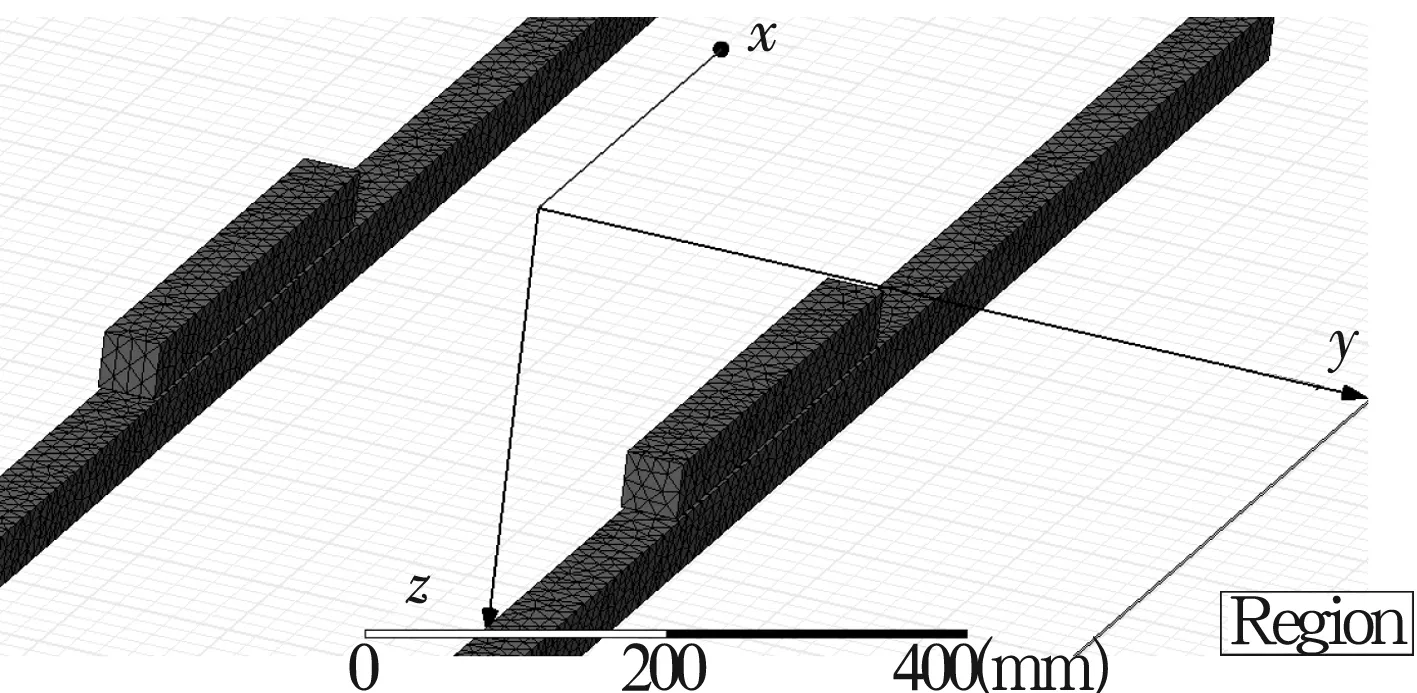
图4 磁条网格划分
计算的其他必要参数及所用的右手坐标系如图5所示。模拟时,采用1∶50的比例进行缩小。

图5 坐标系和计算参数
2种方案的初始气隙均为5 mm,以0.5 mm的气隙间隔来计算平台在不同气隙条件下的磁力变化。令竖直方向上的磁力Fz为承载力,Δz为平台在z方向的偏移距离,通过计算2组模型的平台在不同偏移量Δz时的磁力可以得出2组数据结果如图6所示。对于4磁条方案和8磁条方案的另外2个方向上的磁力Fy和Fx,所有数据的绝对值均小于5 N,说明这2个方向存在较小的不稳定力,需要辅助轮和直线电动机来承受。

图6 2种方案的磁力计算比较
根据最小二乘拟合曲线的公式
(13)
(14)
可以求得2种模型磁力曲线拟合所对应的一次函数方程
y=Ax+B。
(15)
计算可得4磁条方案的一次函数拟合方程为
Fz=519.01Δz+6 542.93,
(16)
同样可得8磁条方案的一次函数拟合方程为
(17)

从承载角度分析:
(1)若采用4磁条方案,平台偏移Δz=0时,最大承载力为6 642 N;Δz=4 mm时,最大承载力为8 652 N。但这种方案要求承载力必须大于6 643 N时,平台在垂直方向才可以完全磁悬浮。
(2)若采用8磁条方案,平台偏移Δz=0时,承载力为0;Δz=4 mm时,承载力为3 470 N。
对比以上结果可以发现,采用同样尺寸的磁条,尽管8磁条方案耗用2倍的磁性材料,结构也增大了,但承载能力却不足4磁条方案的一半。反之,若要8磁条方案拥有同样的承载力,需要耗费更多的永磁材料和占用更多的空间。虽然4磁条方案在垂直方向完全悬浮有一定的约束条件,但这可以根据实际工况通过合理的参数设计来克服。
综上所述,4磁条方案适用于重载低刚度工况,8磁条方案适用于轻载高刚度工况。
2.3 平台不同位置时的磁力变化
考虑到长磁条两端的磁场分布与中间的磁场分布有所不同,因此有必要对比平台在两端位置的磁力和中间位置的磁力变化。为了观察平台从一端运动到另外一端时磁力的变化规律,每隔一段距离计算一次,从而得出磁力-位置曲线图。根据模型的对称性,可以只分析平台从中间到一端的磁力变化。计算时采用4磁条模型和气隙c=5 mm的基本参数。
首先以100 mm为间隔,当平台处于边缘位置时,令位移s=0,当平台运动到中间时,根据底座上磁条的长度(2 000 mm)及平台的长度(400 mm)可得s=800 mm,一共需要计算9组数据。同样利用Ansoft进行计算,计算基本设置参考前文,此次网格划分的四面体单元个数在146 319~155 631之间,网格划分情况和图4类似,通过迭代8次即可满足计算精度要求,所得数据见表1。
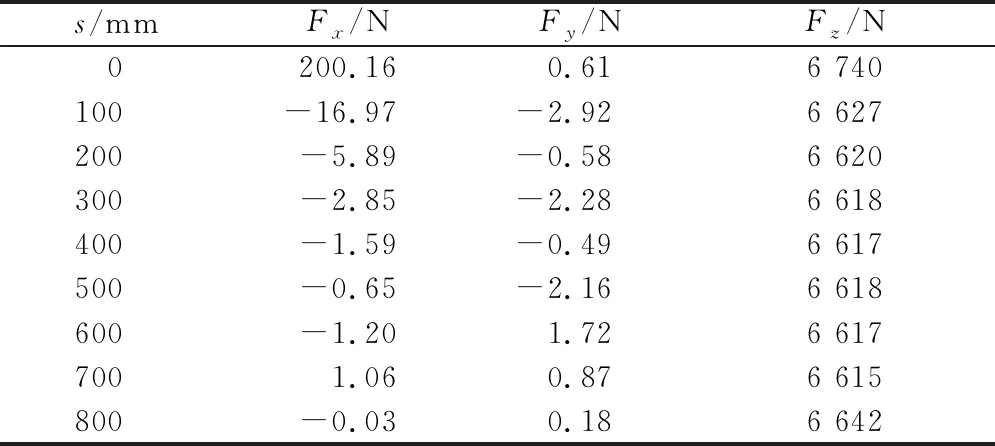
表1 4磁条模型磁力与位置关系
分析以上数据可知,不同位置Fy的绝对值都很小,这是由软件计算误差产生的,理论上应该为0,也说明该方向受力不太平衡,必须采用辅助轮进行定位(由辅助轮承受的力比较小)。Fz随位置的改变也无显著变化。Fx在s=0时有较大的磁力,数值为Fz的3%;随着平台往中间移动Fx逐渐变小,s=100 mm之后Fx变得很小。
为了研究Fx的详细变化,在s=0~200 mm区间内以10 mm为间隔继续分析磁力。根据所得数据绘制曲线图如图7所示,由图可知,磁力在x轴方向的分量Fx主要出现在s=30 mm之前,在s=0~30 mm区间内Fx快速下降,约在50 mm处逐渐趋于0。Fx最大值出现在s=0处,为200.16 N,方向为x轴正向,这是由于边缘不对称效应引起的,不可忽略。x轴方向是直线电动机驱动的方向,因此,设计选用直线电动机时需要考虑这一外力的影响。
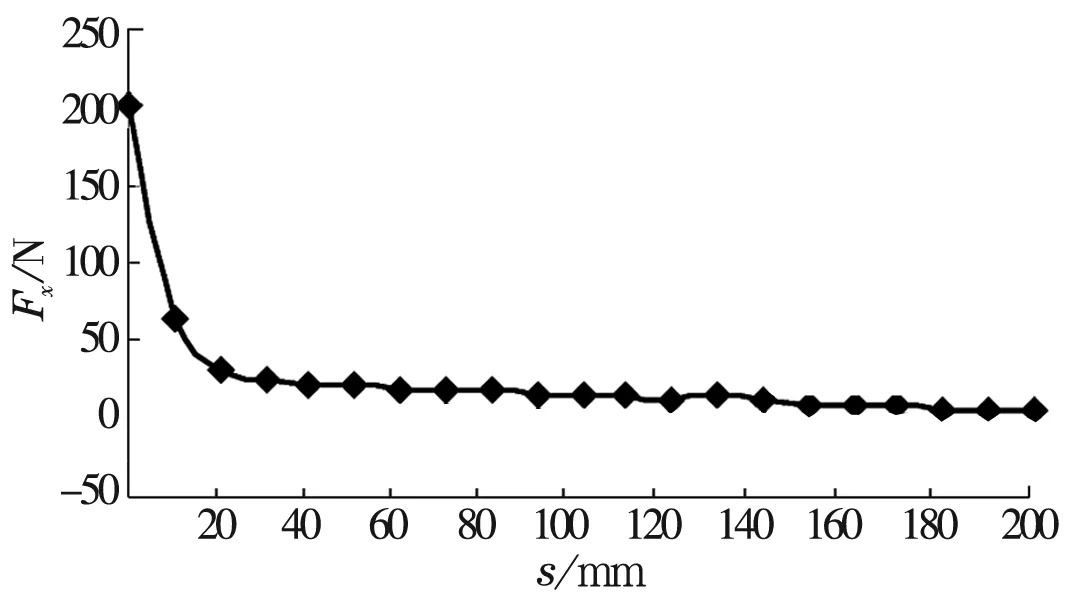
图7 4磁条模型磁力-位置关系图
继续分析s=0~10 mm时Fx的变化,以1 mm为间隔,得到如图8所示的曲线图。这一阶段Fx呈近似直线下降趋势,此结果可以作为直线电动机设计计算的依据。

图8 s=0~10 mm时Fx的变化
3 结论
利用Ansoft Maxwell对2种方案进行了磁力计算,并对4磁条模型平台不同位置时的磁力变化做了计算分析,得出以下结论:
(1)相比8磁条方案,4磁条方案具有耗用磁性材料少、结构紧凑、承载能力大等优点,也有刚度较小和完全悬浮的约束条件,但这些缺点可通过合理的参数设计来克服。说明4磁条方案适用于重载低刚度场合,8磁条方案适用于轻载高刚度场合。
(2)随着永磁悬浮支承移动平台位置的变化,竖直方向或承载方向上的磁力Fz基本无变化,但沿运动方向上的磁力Fx却有明显变化,这是由于磁条边缘处的磁场和磁条中间的磁场不同而引起的,这一特点将对直线电动机的设计产生一定影响。
猜你喜欢
小猕猴智力画刊(2023年4期)2023-04-23 08:50:18
作文小学中年级(2023年1期)2023-02-12 06:52:22
小学科学(2022年23期)2023-01-30 08:16:12
小猕猴智力画刊(2022年4期)2022-05-23 13:48:30
格言·校园版(2021年22期)2021-09-27 05:39:56
小学科学(学生版)(2021年4期)2021-07-23 01:24:18
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:31
中学生数理化·七年级数学人教版(2017年6期)2017-11-09 02:46:03
儿童故事画报·发现号趣味百科(2015年4期)2015-12-04 02:24:44
爆笑show(2015年8期)2015-09-22 01:37:29