检查性反潜时声纳浮标阵阵型优化
2014-07-12 14:39:19丛红日沈培志栾玉佳
海军航空大学学报 2014年4期
丛红日,沈培志,栾玉佳
(海军航空工程学院a.指挥系;b.研究生管理大队,山东烟台264001)
检查性反潜时声纳浮标阵阵型优化
丛红日a,沈培志a,栾玉佳b
(海军航空工程学院a.指挥系;b.研究生管理大队,山东烟台264001)
在总结检查性反潜要求与特点的基础上,分析了检查性反潜时声纳浮标阵的主要阵型,建立了声纳浮标阵作战效能的仿真模型,并在想定条件下对典型声纳浮标阵的搜索效能进行了仿真研究。比较、分析仿真结果,提出了检查性反潜时声纳浮标阵阵型的优化结果。
声纳浮标阵;阵型优化;检查性反潜;航空反潜
声纳浮标普遍装备于反潜直升机和反潜巡逻机,是最重要的航空搜潜器材之一,其作战效能的发挥,在很大程度上影响甚至决定着航空搜潜的作战效能。声纳浮标搜潜时,通常需要由多枚声纳浮标组成声纳浮标阵,声纳浮标阵的阵型影响其搜潜效能[1]。本文针对检查性反潜时使用被动式全向声纳浮标组成声纳浮标阵搜潜的问题,采用仿真方法对声纳浮标阵的阵型进行优化,为检查性反潜时使用声纳浮标搜潜的作战使用提供指导。
1 检查性反潜时声纳浮标阵阵型分析
1.1 检查性反潜的要求与特点
检查性反潜是指反潜机在上级指定的海区和规定的时间内所进行的搜攻潜行动。其目的是在即将使用某海域时提前查明该海域有无敌潜艇活动,对发现的敌潜艇进行攻击或驱逐,以保证舰艇编队在该海区活动时不受敌潜艇威胁。一般来讲,检查性反潜是在不了解目标潜艇位置和运动方向等信息的条件下,对指定区域进行的反潜。检查性反潜大多用于特定海区,如对己方重要舰船编队展开海域或弹道导弹潜艇的待机地域事先进行反潜检查等。
检查性搜索多属于面搜索(区域搜索)。其特点是:一般由上级给定搜索区域,事先不了解潜艇的位置和运动要素,可认为潜艇的分布是均匀的,在给定海域任意一点发现潜艇的概率相等。
1.2 检查性反潜时声纳浮标阵的主要阵型
检查性反潜时,由于无法判断敌潜艇的航向、航速,甚至不能判断所搜索海域是否有敌潜艇存在,因而一般选用搜索面积大、搜索效率高的浮标阵阵型。
通过对声纳浮标阵阵型和检查性反潜特点的研究[2-3],适合用于检查性反潜的浮标阵阵型主要有:方形阵、圆形阵、十字阵、星形阵、“X”形阵、“回”形阵、“田”形阵、三角形阵等,如图1~8所示。

图1 方形浮标阵示意图Fig.1 Schematic diagram of square sonobuoy array
图2 圆形浮标阵示意图Fig.2 Schematic diagram of round sonobuoy array
图3 十字形浮标阵示意图Fig.3 Schematic diagram of criss-cross sonobuoy array

图4 星形浮标阵示意图Fig.4 Schematic diagram of star sonobuoy array

图5 “X”形浮标阵示意图Fig.5 Schematic diagram of“X”sonobuoy array
图6 “回”形浮标阵示意图Fig.6 Schematic diagram of sonobuoy array whose like chinese word“hui”

图7 “田”形浮标阵示意图Fig.7 Schematic diagram of sonobuoy array whose like chinese word“tian”
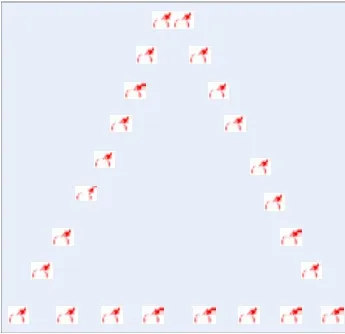
图8 三角形浮标阵示意图Fig.8 Schematic diagram of triangle sonobuoy array
2 仿真模型建立
2.1 效能指标的确定
效能指标的确定对于效能模型的建立至关重要。对于声纳浮标阵的搜潜效能来说,最重要的效能指标就是其搜索概率[4]。搜索概率是指如果在搜索区内存在敌潜艇,则通过搜索能够发现敌潜艇的概率[5]。
2.2 作战机理分析
声纳浮标阵能否搜索到敌潜艇,取决于以下3个条件:一是敌潜艇是否进入声纳浮标阵的有效搜索范围;二是声纳浮标是否能可靠工作;三是声纳员能否有效进行监听[4]。假设后面2个条件能够得到满足,则声纳浮标阵能否搜索到敌潜艇,主要取决于敌潜艇是否进入声纳浮标阵的有效搜索范围。
声纳浮标阵布设后,如果不考虑声纳浮标在风浪作用下的漂移,则每一枚声纳浮标的位置是固定的,但敌潜艇却是运动的。因此,只要敌潜艇的运动轨迹经过了声纳浮标阵的有效搜索范围,就可以认为搜索到了敌潜艇[6]。
由于声纳浮标阵由若干声纳浮标组成,而各声纳浮标的工作是相互独立的[7],因而只要敌潜艇的运动轨迹经过了其中任意一个声纳浮标的有效探测范围,在假设条件下,则可以判定搜索到了敌潜艇。
设某一时刻敌潜艇与声纳浮标阵内任意一枚声纳浮标之间的距离为di(1≤i≤n,i∈Z*,n为声纳浮标阵中声纳浮标的数量),则在满足下式的条件时,认为声纳浮标阵能搜索发现敌潜艇[8-9]:

式(1)中:D为声纳浮标的实际有效探测距离;di的计算公式为

式(2)中:(xT,yT)为敌潜艇在T时刻的位置坐标;
2.3 敌潜艇运动模型
假设在检查性搜索区内敌潜艇不改变航向,则:敌潜艇的运动方程为:

在检查性搜索时,如果敌潜艇在搜索区域内,则通常认为敌潜艇的初始位置服从均匀分布[10],ξ1和ξ2为服从均匀分布的随机数,且0≤ξ1≤1,0≤ξ2≤1,则敌潜艇初始位置的坐标可以表示为:

式中,X和Y分别为与搜索区域沿X轴和Y轴最大值相关的函数。如果搜索区为长方形,且以长方形搜索区的一个顶点为原点建立平面直角坐标系,则X和Y分别为长方形搜索区的长和宽。
在检查性搜索时,敌潜艇航向θ通常也认为服从均匀分布,设ξ3为服从均匀分布的随机数,且0≤ξ3≤1,则

使用上述运动方程,就可以计算出任意时刻T敌潜艇位置的坐标(xT,yT)。
2.4 仿真程序
仿真程序框图如图9所示。
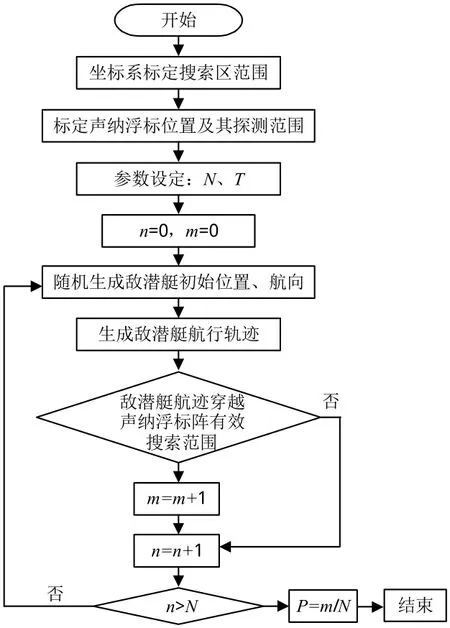
图9 仿真程序框图Fig.9 Block diagram of the simulation program
图9中,n、N分别表示当前的仿真次数和最大仿真次数;m表示探测到敌潜艇的次数;P表示搜索概率。仿真程序使用Matlab编程实现。
3 仿真分析
3.1 仿真想定
1)检查性反潜的搜索区是边长30km的正方形。
2)某型反潜直升机使用声纳浮标遂行本次检查性搜索任务。反潜直升机使用24枚声纳浮标布设声纳浮标阵进行搜索。搜索时采用的声纳浮标阵的阵型见图1~8。图1、2所示的声纳浮标阵沿正方形搜索区边缘的内侧布设;图3~8所示的声纳浮标阵以正方形搜索区的中心点为中心对称布设;图5、6所示的声纳浮标阵的内正方形子阵的边长为20km,声纳浮标数量的分配均如图所示。各阵型内,在同一直线或弧线,声纳浮标之间的间距相等。按照上述规则,经计算确定声纳浮标之间的间距以及各声纳浮标的位置坐标。
3)对声纳浮标阵的最大监听时间为3 h。
4)综合考虑声纳浮标的性能和作战海区的战场环境条件,声纳浮标的实际有效探测距离为2 km。
5)所有声纳浮标在搜索期间均能可靠工作。
6)敌潜艇的起始位置在检查性搜索区内服从均匀分布,其航向服从均匀分布。
7)敌潜艇为常规动力潜艇,其航速v敌分别设为4 kn、6 kn这2种情况。
8)假设敌潜艇在给定搜索海域内做匀速直线运动,且在搜索区内不改变航向。
9)以正方形搜索区左下角的顶点为原点,以相邻的2条边为x轴和y轴建立平面直角坐标系。
3.2 仿真结果及其比较
3.2.1 仿真结果
采用不同声纳浮标阵阵型时的仿真见图10~17。
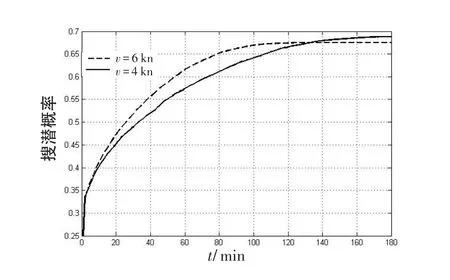
图10 方形阵搜潜概率图Fig.10 Search probability of square sonobuoy array

图11 圆形阵搜潜概率图Fig.11 Search probability of round esonobuoy array

图12 十字形阵搜潜概率图Fig.12 Search probability of criss cross sonobuoy array
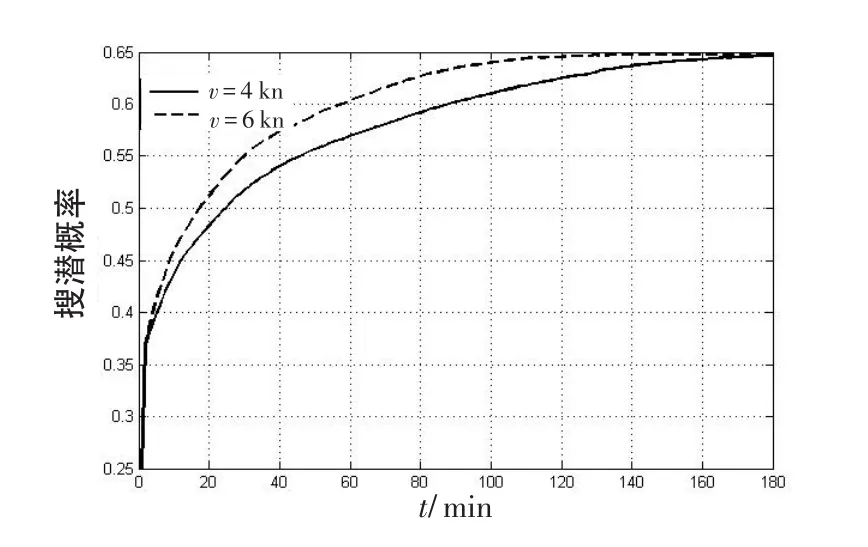
图13 星形阵搜潜概率图Fig.13 Search probability of star sonobuoy array

图14 “X”形阵搜潜概率图Fig.14 Search probability of“X”sonobuoy array

图16 “田”形阵搜潜概率图Fig.16 Search probability of sonobuoy array whose shape like chinese word“tian”
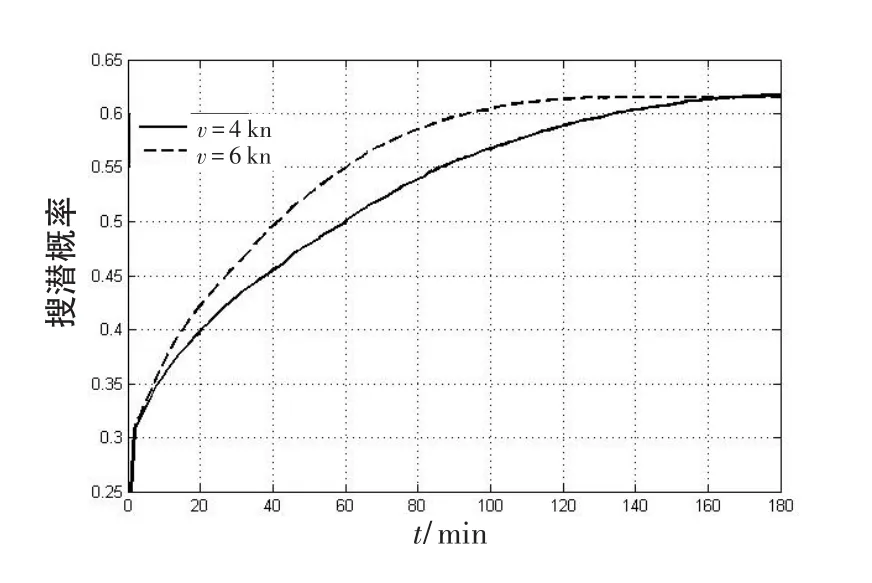
图17 三角形阵搜潜概率图Fig.17 Search probability of triangle sonobuoy array
3.2.2 仿真结果比较
当敌潜艇以较低航速(4kn)航行时,采用不同声纳浮标阵阵型进行搜索的仿真结果比较如图18、19所示。
当敌潜艇以较高航速(6kn)航行时,采用不同声纳浮标阵阵型进行搜索的仿真结果比较如图20、21所示。
通过对仿真结果的比较分析可知,在各种声纳浮标阵阵型中,方形阵和星形阵的搜潜效能相对较高。这2种典型阵型在不同敌潜艇航速下的仿真结果比较如图22所示。
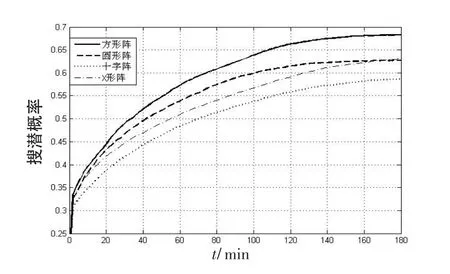
图18 v敌=4 kn时不同阵型搜潜概率比较图1Fig.18 Graph 1 of search probability comparison among different sonobuoy array shapes when v敌=4 kn
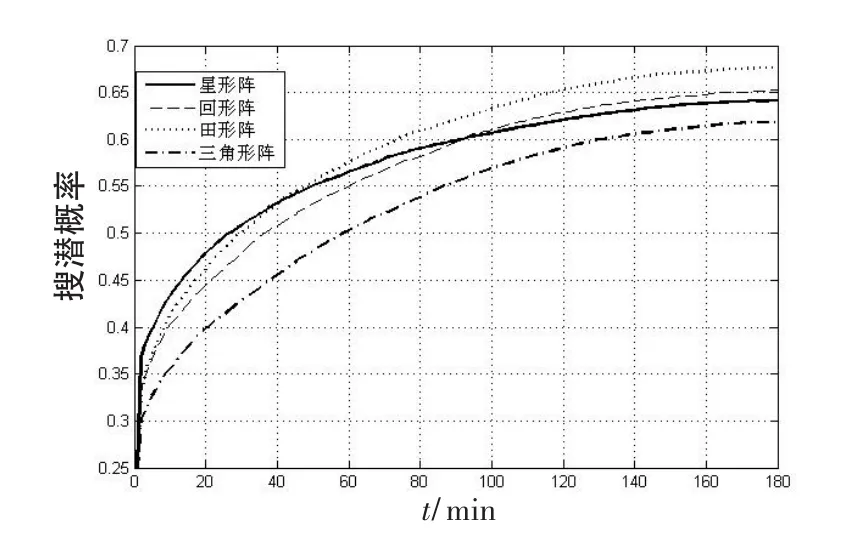
图19 v敌=4 kn时不同阵型搜潜概率比较图2Fig.19 Graph 2 of search probability comparison among different sonobuoy array shapes when v敌=4 kn

图20 v敌=6 kn时不同阵型搜潜概率比较图1Fig.20 Graph 1 of search probability comparison among different sonobuoy array shapes when v敌=6 kn

图21 v敌=6 kn时不同阵型搜潜概率比较图2Fig.21 Graph 2 of search probability comparison among different sonobuoy array shapes when v敌=6 kn

图22 方形阵、星形阵在不同敌潜艇速度下的仿真比较图Fig.22 Search probability comparison between squareness and star sonobuoy array when different speeds of submarine
3.3 仿真结果分析
从仿真结果可以看出:
1)同一声纳浮标阵的搜索效能随监听时间的增加而提高。因此,在实际作战中,如果条件允许,应尽量延长监听时间,以提高搜潜概率。但监听时间的增加和搜索效能的提高不是简单的线性关系。从总体上看,随着监听时间的增加,搜索效能提高的幅度逐渐降低,但表现得也并不平均。大致划分为3个阶段:快速提高期、平稳提高期和滞涨期[4]。如:在图10中,当敌潜艇以高速航行时,0~40 min时,搜潜概率随监听时间的增加快速提高;40~100 min时,搜潜概率随监听时间的增加平稳提高;监听时间超过100 m in时,搜潜概率进入滞涨期,监听时间延长,但搜潜概率基本保持不变。其他声纳浮标阵阵型的搜索概率图也呈相似规律。
2)当监听时间足够长时,声纳浮标阵对敌潜艇的发现概率趋近于某一定值。该值可作为声纳浮标阵搜潜效能指标。发现概率值越大,该阵型声纳浮标阵搜潜效能越高。例如,在本文仿真想定的条件下,当监听时间足够长时,方形声纳浮标阵的搜潜概率最大。
3)敌潜艇航速不同且监听时间不同时,同一阵型的搜潜概率也是不同的,这一点在图10~17中均有体现。因此,需要根据对于敌潜艇航速的判断来合理确定最优搜索阵型。
4)通过对图18~21的分析可知,在想定条件下,总体来看,在各种声纳浮标阵阵型中,方形阵和星形阵的搜潜效能相对较高。
5)敌潜艇航速不相同时,不同监听时间下搜潜效能高的声纳浮标阵型不同,例如,在图22中,若v敌=6 kn,则监听时间40 m in以内时,星形声纳浮标阵的搜潜概率最大,监听时间超过40 m in时,方形声纳浮标阵搜潜概率最大;若v敌=4 kn,则监听时间1 h以内时,星形声纳浮标阵的搜潜概率最大,监听时间超过1 h时,方形声纳浮标阵搜潜概率最大。因此,需要根据对于敌潜艇航速的判断和我反潜直升机可能的监听时间来进行综合判断,合理确定最优搜索阵型。
4 结束语
通过对声纳浮标阵搜索机理的分析,建立了声纳浮标阵搜索效能模型,并在想定条件下对检查性反潜时不同声纳浮标阵阵型的搜索效能进行了仿真分析。仿真结果表明:在想定条件下,当监听时间足够长时,方形声纳浮标阵的搜潜概率最大;敌潜艇航速不相同时,不同监听时间下搜潜效能高的声纳浮标阵型不同。这能够为使用声纳浮标进行检查性搜索的作战使用提供指导,并为以后进一步研究打下基础。
[1] 匡贡献,谢志敏.声纳浮标阵目标搜索优化布放算法[J].海军航空工程学院学报,2011,26(5):508-512. KUANG GONGXIAN,XIE ZHIMIN.Research on sonobuoys deployment in searching underwater target[J].Journal of Naval Aeronautical and Astronautical University,2011,26(5):508-512.(in Chinese)
[2] 杨日杰,周旭,曾海燕.被动全向声纳浮标跟踪潜艇的优化布放方法[J].指挥控制与仿真,2011,33(5):80-83. YANG RIJIE,ZHOU XU,ZENG HAIYAN.Optimal deployment of passive omnidirectional sonobuoys in the underwater target tracking[J].Command Control&Simulation,2011,33(5):80-83.(in Chinese)
[3] 杨日杰,周旭,张林琳.主动全向声纳浮标跟踪潜艇优化布放方法[J].系统工程与电子技术,2011,33(11):2249-2253. YANG RIJIE,ZHOU XU,ZHANG LINLIN.Optimal deployment of active omni-directional sonobuoys in underwater target tracking[J].Systems Engineering and Electronics,2011,33(11):2249-2253.(in Chinese)
[4] 丛红日.声纳浮标阵搜潜效能通用仿真模型研究[J].系统仿真技术,2010,6(2):104-109. CONG HONGRI.Study on general simulation model of searching effectiveness of sonobuoy array[J].System Simulation Technology,2010,6(2):104-109.(in Chinese)
[5] 许爱强,盛沛,谭勖.机载浮标搜潜系统搜潜效能评估模型[J].兵工自动化,2011,30(8):43-45. XUAIQIANG,SHENG PEI,TAN XU.Amodel for evaluating submarine reconnaissance effectiveness of air-borne buoy submarine reconnaissance system[J].Ordnance Industry Automation,2011,30(8):43-45.(in Chinese)
[6] 杨日杰,王正红,周旭.浮标阵形对搜潜效能影响的研究[J].计算机仿真,2009,26(12):16-20. YANG RIJIE,WANG ZHENGHONG,ZHOU XU.Influence of sonobuoy array on the efficiency of searching submarine[J].Computer Simulation,2009,26(12):16-20.(in Chinese)
[7] 蒋志忠,杨日杰,李大龙,等.反潜巡逻机布放包围浮标阵应召搜潜建模与仿真[J].海军航空工程学院学报,2011,26(4):422-426. JIANG ZHIZHONG,YANG RIJIE,LI DALONG,et al. Modeling and simulation for on-call search submarine by anti-submarine patrol aircraft dropping encircle sonobuoy array[J].Journal of Naval Aeronautical and Astronautical University,2011,26(4):422-426.(in Chinese)
[8] 陈庆风,鞠建波,赵明.反潜巡逻线中声纳浮标的作战使用与搜潜方法[J].火力与指挥控制,2011,36(9):112-114. CHEN QINGFENG,JU JIANBO,ZHAO MING.Using and detection methods of sonobuoy in searching submarine at beat[J].Fire Control&Command Control,2011,36(9):112-114.(in Chinese)
[9] 曾海燕,杨日杰,周旭.声纳浮标搜潜优化布放技术研究[J].指挥控制与仿真,2012,34(1):82-85. ZENG HAIYAN,YANG RIJIE,ZHOU XU.Research on sonobuoys deployment technology in searching submarine[J].Command Control&Simulation,2012,34(1):82-85.(in Chinese)
[10] 罗木生,侯学隆,郑保华.网络中心与平台中心的声纳浮标探测概率建模[J].火力与指挥控制,2013,38(4):154-157. LUO MUSHENG,HOU XUELONG,ZHENG BAOHUA.Track-initiation probability of net-centric and platform-centric sonobuoys[J].Fire Control&Command Control,2013,38(4):154-157.(in Chinese)
Sonobuoy Array Shape Optimization when Checking Anti-Submarine
CONG Hong-ria,SHEN Pei-zhia,LUAN Yu-jiab
(Naval Aeronautical and Astronautical University a.Department of Command; b.Graduate Students'Brigade,Yantai Shandong 264001,China)
On the base of summarizing the requests and characteristics of checking anti-submarine,the main array shapes of sonobuoy when checking anti-submarine were analysed.The simulation model of sonobuoy array searching efficiency wasset up,and on the condictions of opration scenario,the seaching probabilities of different sonobuoy array shapes were studied in simulation method.The simulation resulted was analyzed in detail,and some optimized results of sonobuoy array shape when checking anti-submarine were put forward.
sonobuoy array;array shape optimization;checking anti-submarine;airborne anti-submarine
E83
A
1673-1522(2014)04-0391-06
10.7682/j.issn.1673-1522.2014.04.019
2014-02-28;
2014-04-25
丛红日(1966-),男,副教授,博士。
猜你喜欢
中国畜禽种业(2022年8期)2022-09-17 03:29:14
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:42
小哥白尼(神奇星球)(2020年5期)2021-01-18 05:02:38
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
小哥白尼(趣味科学)(2019年6期)2019-10-10 01:01:38
小学科学(学生版)(2019年6期)2019-07-10 00:52:16
电子测试(2018年14期)2018-09-26 06:04:12
无人机(2017年10期)2017-07-06 03:04:38
冰雪运动(2016年5期)2016-04-16 05:55:13