
电子战无人直升机抵近支援干扰仿真研究
2014-07-11 07:54程彦杰毋晓鹤
航天电子对抗 2014年2期
程彦杰,毋晓鹤,徐 宙,刘 分
(中国洛阳电子装备试验中心,河南 洛阳 471003)
0 引言
目前,随着雷达技术的飞速发展,现代雷达已经具有窄波束、低副瓣的特点,其天线副瓣输出的电平一般很低,电子战飞机远距离的副瓣干扰往往难以达到理想的干扰效果,同时雷达还具备副瓣对消、频率捷变和副瓣匿隐等多种反干扰措施[1],使得电子战飞机的随队掩护干扰或远距离支援干扰的效果大大减弱,甚至失去作用。而携带有雷达干扰载荷的电子战无人直升机凭借其身小灵便、机动性强,可利用山岭地物做掩护纵深突防,飞临敌方前沿或侧翼,低空悬停、瞄准干扰,干扰信号能直接进入敌方雷达接收机主瓣和副瓣,有效地抑制了副瓣对消、副瓣匿隐等多种雷达反干扰措施,赢得了“空中灵巧魔爪”的美誉,弥补了超近距离干扰掩护攻击机群的作战配置空缺,在电子战领域的地位作用也越来越突出。
1 电子战无人直升机抵近干扰雷达的优点
电子战飞机一般体积较大、造价昂贵,有专业的飞行员和操作员,对抗作战一般都采取远距离支援干扰或者随队掩护干扰,虽然干扰覆盖面广,但是干扰目的性差,对于大多新式雷达比如相控阵雷达,干扰效果不佳。同时大型飞机机动性差,不能够灵活应变;有人驾驶顾忌较多,相对危险的空域不能够及时进入并有效实施压制干扰。
同传统的电子战飞机相比,电子战无人直升机抵近雷达实施干扰具有以下优点:
1)无人直升机体积小、质量轻、造价低、效费比高,而且无需驾驶员进行机上操作,不存在人员伤亡。因此,电子战无人机抵近目标执行任务几乎没有后顾之忧。
2)无人直升机无需任何辅助起飞和回收装置,能垂直起降和自由悬停,对起飞场地和跑道没有要求,作战过程中可以随时在陆地或舰船上起飞执行任务,能够适应多种作战环境。
3)无人直升机机身采用复合材料并进行了隐身结构设计,可以有效降低其雷达反射截面积,使得敌方雷达难以探测,可隐蔽纵深突防;同时无人直升机尺寸很小,发动机功率较低,其红外热信号也很低,可飞临敌方雷达附近隐蔽处悬停实施近距离支援干扰,优势明显。
4)电子战无人直升机抵近支援干扰雷达,由于远离己方阵地,因此避免了对己方设备产生电磁影响;同时抵近干扰在很大程度上减少了干扰机天线和雷达天线之间的射频路径损耗,使得携带的干扰机不仅能从雷达主瓣实施干扰,而且能从雷达副瓣实施干扰,压制雷达实施副瓣反干扰技术。
5)无人直升机续航时间长,可贴地飞行,长时间在指定区域巡航、悬停。另外,无人直升机作战时还能按预编程序绕过固定的防空阵地,防空一方大部分雷达很难对其实施探测和跟踪,从而使敌方雷达预警效率大大降低。
2 无人直升机雷达对抗模型分析
2.1 电子战无人直升机干扰雷达数学模型
设电子战无人直升机(后简称无人干扰机)、雷达和掩护目标的空间关系如图1所示。雷达天线主瓣指向目标,而无人干扰机以天线主瓣指向雷达,干扰能量大部分将由雷达副瓣进入雷达。

1 无人干扰机、雷达和目标的空间关系图
此时,雷达将同时收到两个信号:目标的回波信号和无人机的干扰信号。
雷达接收到的目标回波信号功率为:

式中,Pt为雷达发射功率,Gt为雷达天线增益,σ为目标的雷达截面积,λ为雷达工作波长,Rt为目标与雷达之间的距离。
进入雷达接收机输入端外的干扰信号功率为:

式中,Pj为雷达发射功率,γj为干扰信号对雷达天线的极化损失,Rj为无人干扰机与雷达之间的距离,Gj(φ)为无人干扰机干扰天线在雷达方向上的增益。
无人干扰机的干扰功率和回波信号的功率比为:

又因为干扰-回波信号功率比大于或者等于干扰

从上述干扰数学模型可以看出,PjGj为有效干扰功率,PtGt为有效雷达功率,实施主瓣干扰时G′t较大,无人干扰机释放的有效干扰功率要求小,实施副瓣干扰时G′t较小,无人干扰机所需释放的有效干扰功率相对就较大,对于所有的电子战干扰机来讲,其干扰功率都有最大值,一旦满足不了,就不能够正常干扰敌方雷达、掩护己方目标。因此,当被干扰雷达与被掩护目标的参数给定时,要求的有效干扰功率就是干扰距离Rj的函数,它们之间存在确定的关系,下面进行仿真计算分析。
2.2 实例仿真分析
对于给定的雷达、无人干扰机和目标,技术参数和目标参数是一定的,假设敌方雷达的发射功率为Pt=100kW,雷达天线增益为Gt=30dB,σ=10m2,Gt(θ)为高斯方向图,波束宽度为1.5°,Rt=10km,γj=0.5,Kj=10。对(4)式进行整理,可得到无人干扰机的有效干扰功率与干扰距离的关系为:

在此种条件下,运用Matlab仿真工具进行实例仿真计算,得出无人干扰机在不同的干扰距离上对敌方雷达实施干扰时,所需释放的有效压制干扰功率最小值,如表1所示。
压制系数Kj,所以即可得出雷达对抗干扰模型为:

表1 无人机干扰距离与所需的有效压制干扰功率关系变化表
无人干扰机抵近雷达的干扰距离与所需的有效压制干扰功率关系仿真曲线如图2所示。
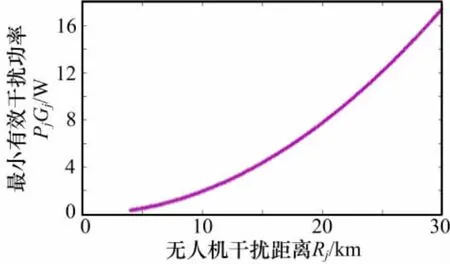
人干扰机干扰距离与所需有效压制干扰功率关系图
从图2可以看出,电子战无人直升机抵近雷达实施干扰,距离越近,越能以较小的干扰功率获得有效的干扰效果,如果干扰距离减少至原距离的1/5,则干扰强度增大30倍,但是干扰距离也不是无限接近,下节会给出分析。同时干扰距离近,机载干扰机接收的雷达信号功率强,灵敏度要求就可以大大降低,由此就可以降低对机载干扰设备的要求,对于干扰设备的体积、质量、电源功率的改进设计等是非常有意义的。
2.3 最小配置距离分析
虽然电子战无人直升机随着与雷达距离的接近,干扰效果会越来越好,但是无人直升机也不是能够无限接近雷达的。距离太近会容易暴露目标,而且干扰距离越近,无人干扰机接收雷达辐射的功率就越大,当雷达主波束照射时,由于接收信号功率过强、超过无人干扰机接收机负荷而容易导致接收系统过载烧毁,因此一定要避免此类情况发生,要把无人直升机干扰位置配置在与雷达距离合适的区域。
根据无人机抵近干扰雷达的特性,设定无人干扰机接收系统所能承受的最大信号功率为Pmax,则无人干扰机距雷达的最小干扰距离为:

式中,Ar是无人干扰机接收天线的有效接收面积。无人干扰机在距离雷达的最小干扰距离之外,才不必担心接收系统会被烧毁。这里取有效接收面积为既定参数,其他参数同上述设定,仿真计算得出在此种情况下,无人干扰机与雷达距离的最小配置不得小于3.89km,以上分析不考虑大气衰减、地面反射等因素的影响。因此,为达到较好的干扰效果,必须根据无人干扰机的相关约束条件和效能分析进行合理的配置。
3 无人直升机抵近干扰时压制区的计算模型
根据雷达干扰方程,现在建立数学模型并分析雷达对抗战术上最重要的干扰效能指标——压制区。压制区即无人直升机释放干扰为使雷达不能发现目标的空间区域[3],通过压制区的分析可以得出无人直升机额载干扰机的威力范围。电子战无人直升机飞临目标雷达附近地域后,选择适当的隐蔽处定点悬停释放干扰,此时可以将无人直升机和雷达均看作是固定的点,而所掩护的战机则是运动的点目标,其空间关系如图3所示。

图3 无人干扰机掩护战机时的空间关系



4 无人机抵近支援干扰压制区仿真分析
以雷达为坐标轴极点,雷达与无人干扰机之间的连线为极轴,建立极坐标系。根据上述讨论,以θ为自变量,分别取烧穿距离R0为5km,K=0.06,H=6km,考虑到无人直升干扰机随地形起伏超低空飞行,一般处于雷达盲区,可超近距离抵近敌方雷达但最小距离大于3.89km,因此Rj分别取值20km、12km、6km,代入设定的参数,通过Matlab仿真运行得出Dt所满足的曲线图像,如图4~5所示。
由图4可以看出,该闭合曲线是由无人干扰机和雷达连线为轴、两边对称于此线的一个类心形曲线,压制区即为该心形曲线之外的区域,而该心形曲线内的区域为暴露区,当被掩护的战机飞至暴露区以内时,雷达将会发现战机。
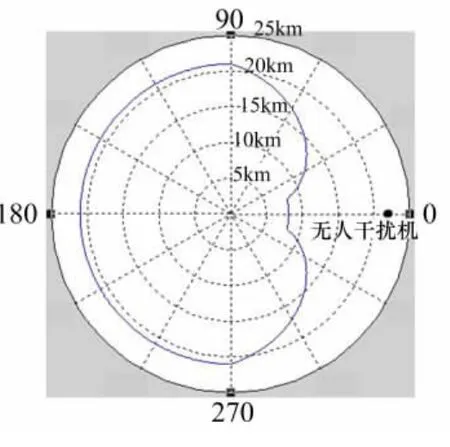
图4 无人干扰机掩护战机时压制区仿真图

图5 随无人机干扰距离Rj抵 近压制区的空间变化图

目前,电子战无人直升机是低空潜入敌方重点防御区内干扰敌防空雷达、指挥控制枢纽的最佳武器平台。建议今后无人直升机可采用更轻质的雷达吸波和红外隐身等复合材料,同时改进无人直升机雷达横截面设计,提高其隐身突防能力,尽可能缩短无人干扰机抵近支援干扰距离,增强干扰效果;同时采取纳米技术压缩改进发动机,并加装热源处理器,可有效地降低无人直升机红外热信号的辐射,躲避敌方雷达侦察系统,甚至在被观察哨发现时,仍可令敌方发射的便携式红外寻的导弹“无的可寻”。
5 结束语
电子战无人直升机具有可利用地形地貌做掩护、定点悬停、超近距离飞临敌方雷达实施支援干扰的优势。本文通过建立无人直升机雷达对抗模型、无人直升机不断抵近支援干扰的压制区模型,运用Matlab软件进行仿真分析,得出无人干扰机抵近支援干扰的干扰效果与干扰距离、干扰功率之间的关系。随着干扰距离的抵近,干扰扇面增大,所需的有效干扰功率减小;功率不变时,掩护己方目标的压制区就越大,暴露区越小,电子战无人直升机的干扰效能得到明显提高。同时,通过本文的分析,对无人直升机和机载干扰设备的合理改进提供了意见参考,希望能在一定程度上起到抛砖引玉的作用。
[1]费华莲,陈越.电子战无人机对抗相控阵雷达的技术浅析[J].电子侦察干扰,2007(3):1-4.
[2]周建军,陈超,崔麦会.无人直升机的发展及其军事应用[J].航空科学技术,2003(1):38-40.
[3]邵国培,曹志耀,何俊.电子对抗作战效能分析[M].北京:解放军出版社,1998.
[4]赵国庆,张正明,林像印.雷达对抗原理[M].西安:西安电子科技大学出版社,1999.
[5]侯印鸣,李德成,孔宪正,等.综合电子战[M].北京:国防工业出版社,2002.
[6]杨军,赵锋.无人机在雷达对抗中的应用研究[J].舰船论证参考,2008(1):59-64.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
军事文摘(2022年17期)2022-09-24
小哥白尼(军事科学)(2022年1期)2022-04-26
北京航空航天大学学报(2021年9期)2021-11-02
火控雷达技术(2021年2期)2021-07-21
航天电子对抗(2019年4期)2019-12-04
军事运筹与系统工程(2019年1期)2019-11-16
无人机(2018年1期)2018-07-05
北京航空航天大学学报(2017年9期)2017-12-18
军事运筹与系统工程(2016年4期)2016-07-10
