
统一电能质量调节器并联侧控制算法的研究
2014-07-07 15:47:34胡晓青程启明程尹曼白园飞吴凯
电源技术 2014年5期
胡晓青,程启明,程尹曼,白园飞,吴凯
(1.上海电力学院自动化工程学院,上海 200090;2.上海电力公司市北供电分公司,上海 200041)
统一电能质量调节器并联侧控制算法的研究
胡晓青1,程启明1,程尹曼2,白园飞1,吴凯1
(1.上海电力学院自动化工程学院,上海 200090;2.上海电力公司市北供电分公司,上海 200041)
针对统一电能质量调节器(UPQC)并联侧的结构特点和数学模型,提出了一种基于径向基函数(RBF)神经网络整定PID自适应控制的新算法。该方法由径向基函数神经网络在线辨识得到梯度信息,PID参数根据梯度信息在线调整,自适应系统参数的变化,通过电流控制,使UPQC并联侧输出相反谐波和无功电流,从而使系统中不含谐波电流成分。在Simulink环境下分别针对三相恒定对称非线性负载和三相变化非线性负载的情况进行仿真,仿真结果证明了该方法的有效性和正确性。
谐波检测;统一电能质量调节器;神经网络;径向基函数;自适应;有源滤波
随着电网负荷的急剧加大,特别是非线性、冲击性、非对称性负荷容量的不断增长,电网电压、电流波形畸变、电压波动与闪变,以及谐波等问题使得电网运行环境日趋恶劣,进行谐波抑制和无功补偿的研究势在必行[1-2]。统一电能质量调节器(unified power quality controller,UPQC)[3]兼顾了串联型与并联型装置的优点,具有抑制谐波、补偿无功、平衡负载、调节电压、抑制电压闪变等功能,被认为是最具发展前景的一种柔性交流输电系统[4]元件。
目前在UPQC控制策略中,普遍的做法是串联APF实现动态电压恢复器的功能,控制为电压源来补偿电网电压谐波、跌落和闪变等电压质量问题,使负载电压为基波正弦;并联APF则被控制为电流源来补偿负载产生的谐波和无功电流,使流入电网的电流为基波正弦。
并联APF实现电流补偿,很大程度上取决于逆变器采用的电流控制方法。目前电流跟踪控制方法主要有正弦波脉宽调制法、滞环控制法、无差拍控制法和重复控制法等。其中,正弦波脉宽调制法[5]响应速度快,主要缺点是开关频率不固定且频率高,开关损耗大,输出波形中包含有载波频率的高频畸变分量。滞环电流控制方法[6]控制性能好,精度高,响应快,但是控制精度、开关频率、损耗受容差带宽度影响,对控制精度的要求越高,开关频率和损耗就越高。无差拍控制[7]基于被控对象精确的数学模型,根据逆变器的输出反馈信号和状态方程,计算下一周期的开关时间;缺点是要求脉宽必须即拍即输出,算法较复杂,采样频率较高。重复控制[8]基于内模原理,把外部信号植入控制器内部,高精度地控制反馈,能以较低系统带宽和采样频率获得高质量稳定波形,稳态误差小,但动态性能较差。
本文采用基于径向基函数(RBF)神经网络(NN)整定PID控制策略实现对指令脉宽的调制,以UPQC为模型,对其工作原理和控制方法进行了研究,使其输出的补偿电流能精确跟踪补偿电流信号,更好地达到滤波效果。仿真结果显示其性能优越,适应于电力系统这样强非线性、强不确定性的系统,可靠性高。
1 并联变流器的数学模型
图1为UPQC中的并联变流器[9]及电网部分,将并联变压器等效为Y/Y接法,输出滤波电感折算到变压器副方(4'侧),滤波电容等效为Y型接法。

图1 并联变流器与负载等效电路图
定义并联变流器电压开关函数为:

根据图1得:
由式(2)和式(3)可推出:

并联变流器的输出方程为:

2 RBF神经网络整定理论及其Simulink实现
2.1 并联侧补偿控制原理
通过对UPQC并联侧逆变器的控制,可以使其具有APF、DSTATCOM等功能[10],其工作原理如图2所示。图2中,三相电压源作为非线性负载的电源,当系统中不含对谐波进行补偿的APF时,负载电流等于电源电流,电源电流中含有大量谐波电流,将基波电流用表示,谐波电流用表示,有通过UPQC并联侧向负载侧注入等于负载谐波的电流来消除网侧谐波,使三相电源输出电流中只含有基波部分,如图2所示,

图2 并联侧有源滤波器检测及控制原理
为了控制APF输出补偿电网中的谐波电流,采用基于瞬时无功功率变换的方法检测出三相电网中包含谐波和无功的电流,将检测出来的指令电流*作为APF电流控制的输入给定,通过电流控制,使APF发出与之大小相等、相位相反的补偿电流,从而谐波全部被补偿,只有负荷基波电流流出电网,系统中将不含谐波电流成分。电流控制的具体过程为:将实际补偿电流和基于瞬时无功功率法检测计算出来的补偿指令电流信号相减得到的差,作为调制信号,用基于径向基函数的神经网络整定PID控制器后,再与高频三角载波进行比较,从而将得到的矩形脉冲作为UPQC各开关元件的控制信号,在输出端获得所需的输出波形。
2.2 RBF网络结构
RBF神经网络具有三层前馈网络结构。神经网络结构模拟了人脑结构相互覆盖、局部调整的接收域,如图3所示。因此,RBF网络是一种局部逼近网络,已经证明它能够以任意精度逼近所有连续函数。与BP网络相比,RBF网络是一种前向网络,输入非线性映射到输出,而隐含层线性映射到输出,因此可以避免局部极小问题并极大地加快学习速度。

图3 RBF神经网络的结构


利用梯度下降法,输出权的迭代算法为:

式中:η为学习速率;α为动量因子。
节点中心、节点基宽参数的迭代算法为:
2.3 基于RBF神经网络整定的PID自适应控制
图4是基于RBF神经网络的PID自适应控制系统原理图,将RBF神经网络算法引入PID控制中,结合RBF神经网络算法和传统PID控制的优点,实现对UPQC并联侧指令电流的跟踪控制。RBF神经网络对PID控制器的3个参数进行自适应控制,由神经网络在线辨识得到梯度信息,PID参数根据梯度信息在线调整,适应系统参数的变化,使系统控制品质得到改善。

图4 RBF网络PID自适应控制原理图
P、I、D的3项输入分别为:

性能指标函数可定义为:


(1)确定RBF网络的基宽参数、中心矢量、惯性系数、学习速率和PID控制器比例、积分、微分参数的初始值;
(2)采样得到系统输入、输出以及控制误差,计算得到网络的输入信号1()、2()和3(),将RBF神经网络的权值进行调整,得到输出层的Jacobian阵;
(3)利用Jacobian阵调节PID控制器的比例、积分、微分参数,计算神经网络PID控制器的输出;
3 仿真验证
根据统一电能质量调节器并联侧的系统结构和工作原理,利用Simulink进行仿真。仿真模型的参数可选取:系统侧三相线电压380 V,50 Hz,系统最大容量为20 kVA,直流侧电容为3 000μF,交流侧进线电感为=1.2mH,=100mΩ,高通滤波器=150μF,=2Ω,=7.5mH,负载侧为三相整流桥电路接电阻2.5Ω和1mH电感的串联负载,直流电容电压控制值为0.6 kV。仿真中并联补偿采用基于RBF神经网络的PID自适应控制,通过编写函数实现。RBF网络的结构采用3-6-1,网络输入为()、()和(-1),学习速率η=0.001,动量因子α=0.015,比例、积分、微分的系数、、初始参数分别为20、0.5、0.1。为了适当加快系统仿真速度,利用Power-Gui对整个仿真系统进行离散化,采用固定步长的离散算法,采样周期为1μs,仿真时间为0.1 s。
3.1 对称三相非线性负载的情况
系统负载侧采用可控三相桥式整流电路作为对称三相非线性负载,阻感负载=25Ω,=20mH,触发角为30°。图5为未使用UPQC补偿的电源电流,其含有高次谐波,波形发生畸变,总谐波畸变率为24.72%。图6为经过基于RBF神经网络的PID自适应控制后的实际补偿电流。
图7为经过RBF神经网络整定的PID自适应控制补偿后的电网电流,经过补偿后的电网电流非常接近正弦波,= 3.49%,谐波含量已经减少了许多。补偿后的电网电流可以满足公用电网对谐波的要求。

图5 并联APF补偿前电源电流波形
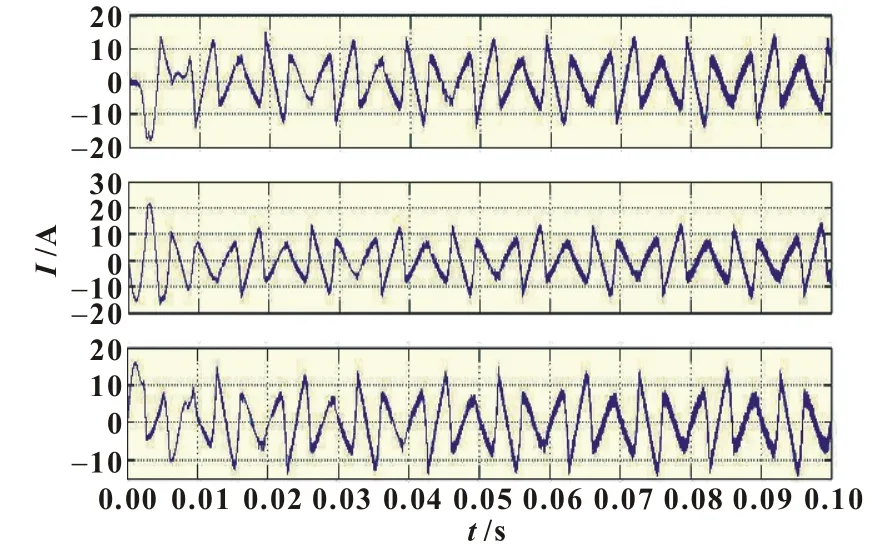
图6 补偿电流

图7 基于RBF神经网络整定的PID自适应控制补偿后电网电流
3.2 时变非线性负载的情况
图8为补偿前的电源电流波形,由于负载发生变化,电流随之发生变化。图9为0.04 s加入非线性负载后的实际补偿电流。补偿后电网三相电流如图10所示。在接入非线性负载变化的情况下,本文所采用的基于RBF神经网络整定PID自适应控制能够自动调整控制器的参数,输出补偿电流,补偿后电网电流波形中各次谐波的含量明显降低。
4 结语
本文针对UPQC并联侧的结构特点,提出了一种基于RBF神经网络整定PID自适应控制的新算法。由神经网络在线辨识得到梯度信息,PID参数根据梯度信息在线调整,适应系统参数的变化,使系统的控制品质得到改善。通过仿真验证了本文所提出控制算法的可行性、有效性和正确性。
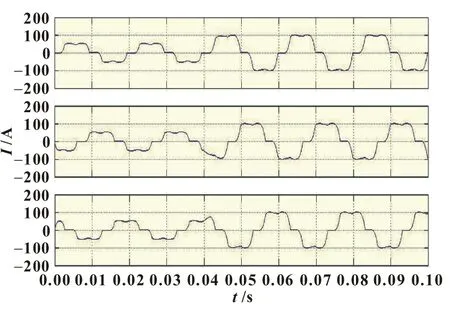
图8 补偿前电源电流

图9 0.04 s加入非线性负载后补偿电流
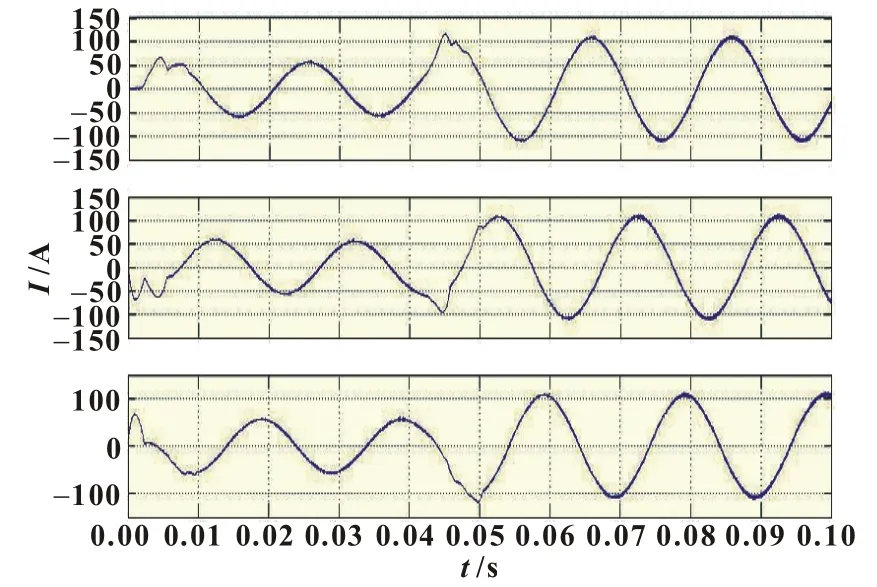
图10 基于RBF神经网络整定PID自适应控制补偿后的电网电流
[1]万健如,裴玮,张国香.统一电能质量调节器同步无差拍控制方法研究[J].中国电机工程学报,2005,25(13):63-67.
[2]朱鹏程,李勋,康勇,等.统一电能质量控制器控制策略研究[J].中国电机工程学报,2004,24(8):67-73.
[3]陈国柱,吕征宇,钱照明.有源电力滤波器的一般原理与应用[J].中国电机工程学报,2000,20(9):17-21.
[4]吕广强,赵剑锋,程明,等.配电网动态电能质量问题及其解决方案[J].高电压技术,2007,33(1):53-56.
[5]莫莉,谢运祥,陈兵.单周控制在有源电力滤波器不同拓扑中的应用比较[J].电力系统保护与控制,2008,36(14):42-47.
[6]FUJITA H,AKAGIH.The unified power quality conditioner:the integration of series and shunt-active filters[J].IEEE Transactions on Power Electronics,1998,13(2):315-322.
[7]胡凯,申群太.基于微粒群算法优化PI参数的单相有源电力滤波器[J].电力系统保护与控制,2009,37(18):51-56.
[8]YE Y,KAZERANIM,QUINTANA V H.A novelmodeling and controlmethod for three-phase PWM converters[J].IEEE Transactionson Power Electronics,1999,46(3):544-553.
[9]黄其新,孙黎霞,甄威,等.同步发电机参数辨识的蚁群算法及扰动分析[J].电力自动化设备,2009,29(11):50-53.
[10]王兆安,杨君,刘进军.谐波抑制和无功功率补偿[M].北京:机械工业出版社,2002.
Research on controlalgorithm atparallelsideof unified power quality conditioner
HU Xiao-qing1,CHENGQi-ming1,CHENG Yin-man2,BAIYuan-fei1,WU Kai1
Aiming at the structural characteristics and mathematical models at parallel side of unified power quality conditioner(UPQC),a new self-adaptation controlalgorithm of tuning PID based on neuralnetwork of radial basis function(RBF)was proposed.The princip le of thismethod lied in that the gradient information was got from the online identification of the radial basis function neural network,and the PID parameters were online adjusted based on gradient information to self-adapt to changes of system parameters.Through current control,the UPQC parallelside could output the opposite harmonic and reactive current,so that the system would not contain harmonic current.To demonstrate the feasibility of the PID adaptive control algorithm based on RBF neural network tuning,it was simulated respectively for the three-phase constant symmetric non-linear load and three-phase changing nonlinear load in Simulink environment.The simulation results prove the validity and correctness of the method.
harmonic detection;unified power quality conditioner(UPQC);neural network(NN);radialbasis function (RBF);self-adaptation;active filter
TM 571
A
1002-087 X(2014)05-0916-04

2013-11-18
上海市重点科技攻关计划(11510500800);上海市电站自动化技术重点实验室项目(13DZ2273800)
胡晓青(1986—),男,江苏省人,硕士研究生,主要研究方向为电力系统及其自动化、光伏发电、电能质量分析与控制。
程启明(1965—),男,江苏省人,教授,主要研究方向为电力系统自动化。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
电子测试(2018年15期)2018-09-26 06:01:04
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
自动化学报(2016年8期)2016-04-16 03:38:51
通信电源技术(2016年5期)2016-03-22 01:09:37
西北工业大学学报(2015年1期)2016-01-19 03:29:56
电源技术(2015年12期)2015-08-21 08:58:44
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:35
