陀螺全站仪在地铁隧道贯通测量中的应用研究
2014-06-24 14:33高军虎
城市勘测 2014年4期
高军虎,秦 宽
(西安市勘察测绘院,陕西西安 710054)
陀螺全站仪在地铁隧道贯通测量中的应用研究
高军虎∗,秦 宽
(西安市勘察测绘院,陕西西安 710054)
为提高地铁隧道贯通测量的精度,通过对陀螺全站仪的工作原理进行分析,介绍并比较了我国国产陀螺全站仪的现状及特点,结合高精度陀螺全站仪在某城市地铁隧道贯通中的工程实例,得出加测陀螺边定向测量后地铁隧道贯通精度将大大提高的结论,从而保证地铁工程建设的顺利进行。
地铁隧道贯通;陀螺全站仪;导线测量;定向测量
1 引 言
在地铁地下隧道内,由于空间狭小、观测环境恶劣等影响,并且由于地下工程的特殊性,许多空间测量技术都无法利用,即使传统的全站仪测量也会受到很大的限制。定向方法更是如此,传递一个精度较高的基准方向更是要耗费许多的资源。导线测量的误差随着隧道掘进的距离延伸,系统误差会不停地累积,从而导致地铁隧道内部引测方位角的定向精度大幅降低。为了控制地铁隧道内导线测量误差的积累,通常的方法就是加测陀螺边,从而可以对隧道内的导线方位角进行有效改善。因为陀螺仪能够对地球自转进行精确感知从而来确定真北方向,所以它可以快捷精确地在地下确定真北方向。这样不仅对系统误差的累积进行了限制,更能对地下控制网的精度提供检核。于是利用陀螺仪来进行方位角定向的基准确定就成为目前完成地下空间定向测量最常用技术[1]。
目前,在地铁隧道贯通测量中陀螺全站仪应用较少。本文通过介绍陀螺全站仪的寻北原理,总结分析了目前我国现有的陀螺全站仪的特点与优势,并结合具体的工程实例——陀螺全站仪在某城市地铁左右线贯通中的应用情况,来验证加测陀螺边后的方位角定向精度的升高对地铁隧道内导线测量的精度、减小贯通误差有重要的提高作用。
2 陀螺仪寻北工作原理分析
陀螺仪的种类多种多样,结构也千差万别,虽然各种陀螺全站仪用途多样性,结构的差异性很大,但所有陀螺仪都具有定轴性和进动性这两个基本特性[2]。
本文以常用的悬挂式陀螺经仪为例来介绍寻北规律。一般的陀螺在地球自转的影响下,陀螺的自转轴和两端高度都在不停地变化中,它不能完成需要的测量定向工作。为此,通常是构造一个摆式陀螺,即在原有的基础上,在陀螺中心轴下方加装一重物,使其中心下移如图1所示。假设在初始情况下,陀螺的自转轴在某时刻与地平面平行,此时重力线的方向即通过重心也通过支撑点,此时重力力矩的方向与自转轴一致,不会出现进动性。
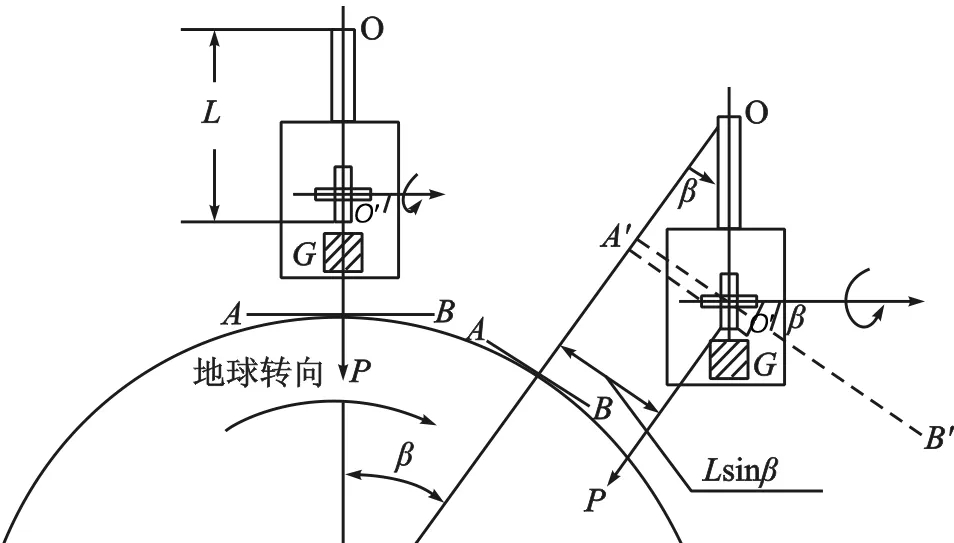
图1 摆式陀螺仪寻北工作原理
而在下一时刻,地球自转的作用将会导致陀螺主轴绕Y轴旋转,因而X轴不再与地平面平行,假设它旋转过,此时重力力矩Mp的方向将不与自转轴平行,它的大小如下:

此时重力力矩作用的陀螺的旋转轴上,陀螺满足了它的进动条件。由进动规律可知,进动角速度应与外力矩和陀螺的动量矩有下面的关系:

从上式看出,当实际选用的陀螺仪确定后,进动角速度完全受高度角的影响,而β却是由地球的自转作用产生的,于是陀螺仪的自转轴就在地球自转分量和重力矩的综合作用下发生进动效应。本文将它们的合力矩统称为指向力矩,它的大小为:

由陀螺的进动性可知,陀螺的自转轴向子午面的进动过程是一个不断往复的周期过程。在某一位置,受重力力矩的作用,陀螺自转轴开始向子午面运动,进动到子午面时,进动速度达到最大,这时重力力矩的大小为0,当自转轴继续向西运动时,重力力矩指向相反的方向因此,这时进动速度越来越小,当抬高角减少到零时,朝西的进动也就停止(此点称为逆转点)。但是因为地球继续在旋转,自转轴又开始返回向子午面进动,进而形成了周期性的往复运动想象。这样,就可以根据往复摆动运动的中心确定子午面的方向,从而确定陀螺北方向,进而得到真北方向,从而计算出坐标北方向,完成测量定向工作。
当然,实际的工作中,仪器在制造、使用、运输过程中难免会有误差,从而使陀螺北与真北方向不一致,一般称这个差值称为仪器常数。实际工作中,往往会有专门的程序用来测出这个仪器常数。
3 目前我国高精度陀螺全站仪的现状及特点
以地铁施工为例,地铁建设迫切需要自动测量陀螺全站仪。由于地铁隧道贯通测量的观测条件差,导致导线定向的精度低及误差大,且效率不高,常常困扰着生产管理者和测量人员,即使拥有原威特厂的GAK1或国产的JT15陀螺经纬仪,由于仪器操作时劳动强度大,极易返工,特别是仪器在有风吹和震动的环境下,也会很难测出成果。导致的结果是:在陀螺经纬仪的定向现场,因为高精度的要求往往需要其他施工工作停工,因而会造停工损失。大部分国内城市地铁施工往往占据城市的主要交通干线,施工工期非常紧张。据北京地铁施工方估计,以往一次定向工作造成的停工损失约为20万元~25万元。地铁建设迫切需要新的高效率的定向方法[3]。
为保证地铁隧道贯通的精度和在规定工期内完成地铁隧道建设,建设规范要求盾构单向掘进长度超过1 km的地铁线,就要加测定向的陀螺边。国外的陀螺全站仪生产精度虽然优于5″,但价格非常昂贵,并且陀螺全站仪有一定的军事用途,绝大多数国家都对我国实施装备禁止进口。因此通过使用国产高精度陀螺全站仪对于进行地铁隧道贯通定向测量具有非常重要的经济效益与国家战略意义。
3.1 悬挂带式全自动陀螺全站仪及特点
当前,绝大多数陀螺全站(经纬)仪采用的都是悬挂带支承技术(如Y/JTD系列陀螺全站仪,如图2所示)。这种仪器通常采用的定向方式是摆式下悬挂陀螺定向,利用积分法测量原理,实现高精度寻北[4]。测量精度为一次定向测量中误差在5″以下,一测回定向时间小于18 min。采用一些抗干扰设备,一定程度上提高了设备的抗干扰能力。但由于采用的是悬挂带支承技术,而悬挂带的性能将直接影响到陀螺的寻北精度。此外,悬挂带的与陀螺灵敏部之间的有缘接触会对陀螺产生干扰力矩影响,降低陀螺寻北精度[5]。因此,所有的悬挂带式陀螺在定向前后均需要进行零位观测,以测定其摆动的平衡位置。

图2 Y/JTD系列陀螺全站仪
3.2 AGT-1高精度自动陀螺全能仪及特点
该陀螺全站仪(如图3所示)是由中南大学中南大学和长沙市莱塞光电子技术研究所合作研制推向市场的,其独特之处是充分利用了现代测绘技术手段,并将其融合。系统产品的结构如下:①由自动跟踪电子全站仪;②环状螺纹连接器;③自动陀螺;④计时信号通道;⑤掌上电脑;⑥陀螺电源控制器;⑦电源;⑧GPSRTK接收机;⑨与RKT接收机配套的GPS基站;⑩快速定位定向测量控制软件等。该陀螺智能化程度较高,操作简便,定向精度也在5″级以下,在现场可取得的坐标方位角而不只是陀螺方位角。但是该陀螺不能自动升降陀螺,且整个构成系统较为庞杂,导致其整机商品化等方面差距较大。

图3 AGT-1自动陀螺全能仪
3.3 GAT高精度磁悬浮陀螺全站仪及特点
GAT高精度磁悬浮陀螺全站仪(如图4所示)是由长安大学与中国航天科技集团公司第十六研究所联合开发研制。其技术突破和创新主要表现在三个方面,一是采用了磁悬浮支撑技术,二是力矩反馈控制技术及其配套的测量方法,最后是数据处理技术。这些突破和创新使GAT陀螺仪相比一般的陀螺仪具有许多独特的优势,改进了陀螺仪的关键技术,精度也达到了国际先进水平。GAT磁悬浮陀螺仪最大的改进就是它采用了磁悬浮技术替代了传统的悬挂带技术来支撑陀螺马达房。它正常工作的原理是当陀螺全站仪开始工作时,给磁悬浮线圈通电,根据电磁原理产生的磁力便会将陀螺的马达房悬浮起来;当测量结束后,关闭电源,陀螺的马达房就会自动回落[6,7]。

图4 GAT磁悬浮陀螺全站仪
4 应用实例分析
为使我国国产陀螺全站仪投入到国民经济建设当中,特别是在地铁隧道贯通测量中去创造经济效益,节省庞大的采购资金,加快普及力度,本文结合某城市某条地铁线隧道的贯通测量定向进行实例分析[8]。
4.1 工程概况
某城市地铁某条线全长44 km,为保证地铁隧道顺利贯通,利用陀螺全站仪对该线一期工程某区间左右线Y1→Y2、Z1→Z2导线边进行高精度陀螺定向。如图5所示。
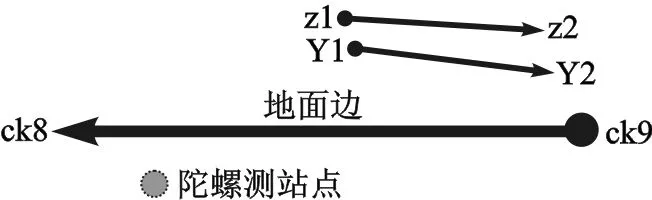
图5 陀螺定向边示意图
依据相关规范[8]关于陀螺仪定向测量的有关规定:在地面已知边上采用三测回测量陀螺方位角,求得3个仪器常数;在隧洞内定向边上两测回测量陀螺方位角;返回地面后,在原已知边上重新标定仪器常数,以检核仪器稳定性。由于此次陀螺定向使用的陀螺全站仪,标称定向精度为5″,因此要求同一边任意两测回测量陀螺方位角的互差,不得超过10″;对于超限数据应在现场予以补测。
4.2 陀螺定向测量
陀螺定向测量包括两部分:①地面常数边陀螺定向测量,本例中选取地面控制网中Ck9、Ck8两个控制点构成的测线Ck9→Ck8进行地面常数边陀螺定向测量。②地下导线边定向测量,本例中在隧洞内需测边Y1→Y2、Z1→Z2导线边上进行两测回测量,测定其陀螺方位角。
4.3 成果计算分析
(1)陀螺定向计算及精度评定[9]
根据提供的地面控制点坐标,可以计算测线“Ck9→Ck8”坐标方位角αCk9→Ck8:
αCk9→Ck8=270°12′15″
由真北方位角计算公式:A=α+γ(其中A为测线的真北方位角;α为测线的坐标方位角;γ为测站点子午线收敛角)和陀螺仪器常数计算公式:A=T+△(其中T为陀螺定向测量值;△为仪器常数值),可以推导出如下公式:
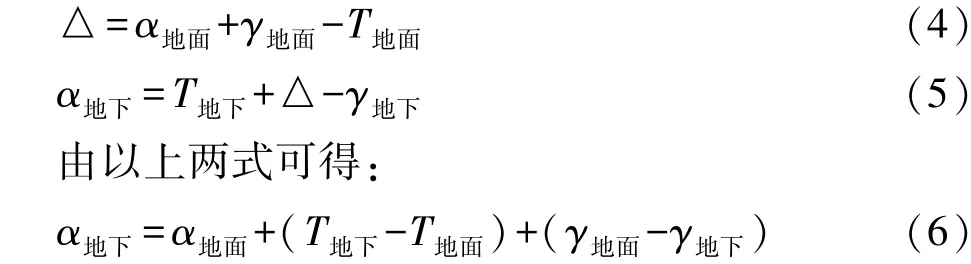
地面常数边测站点与地下定向边测站点间距离分别为Ck9点至Z1点距离为108.579 m,Ck9点至Y1点距离为100.832 m,故子午线收敛角之差对定向成果影响甚微,因此地下定向边成果可依据下式计算:

①仪器常数稳定性精度评定结果如表1所示。

表1 地面陀螺常数测定精度评定
(2)洞内导线边定向成果计算
由上述推导的地下导线边坐标方位角公式,配合隧洞内各定向边的陀螺定向成果,对T地下-T地面进行计算,结果如表2所示:

表2 陀螺定向成果计算
根据地面边计算所得的方位角αCk9→Ck8=270°12′15″,以及上表计算所得T地下-T地面,可以计算出地下导线边的坐标方位角α地下,如表3所示:
4.4 陀螺定向成果与导线测量方位角比较
陀螺定向与导线测量得到的坐标方位角成果及较差如表4所示。

表4 Y1→Y2、Z1→Z2边陀螺与导线测定坐标方位角较差值
实际观测中,测量观测条件良好,观测成果可靠。陀螺定向精度为1.7″,属于高精度测量成果,满足精度要求。根据陀螺定向测量成果对井下导线测量进行改正,以提高隧洞贯通精度。根据改正结果,最终该地铁线区间实现成功贯通。
5 结 论
本文通过对陀螺全站仪的寻北工作原理进行研究分析,介绍并分析了我国陀螺全站仪的现状及特点,并通过陀螺全站仪在某城市地铁隧道贯通测量中的实际应用,加测陀螺边定向测量后,根据测量结果改正了导线实测的坐标方位角,最终实现地铁隧道的成功贯通。由此可见,陀螺全站仪在地铁隧道贯通测量中能创造经济效益,提高贯通效率,从而能节省庞大的停工成本,保证地铁工程的顺利进行。
[1] 龚云,杨志强,石震.GAT磁悬浮陀螺全站仪在矿山测量中的应用[J].测绘科学,2012(2):185~187.
[2] 孔祥元,郭际明,刘宗泉.大地测量学基础[M].武汉:武汉大学出版社,2010:142.
[3] 杨馄.高精度陀螺全站仪国产化的现状和前景[C].中国测绘学会.全国测绘仪器综合学术年会会议论文集[A].2009:201~203.
[4] Shi Zhen,Yang Zhiqiang,Yang Jianhua,et al.The Method of Surveying ITRF Coordinate Indirectly Based on Gyro Orientation[C].Navigation and Location Services:Emerging Industry and International Exchanges,CPGPS,2010:169~172.
[5] Jun Won Choi,Nam Ik Cho.Suppression of narrow-band interference in DS-spread spectrum systems using adaptive IIR notch filter[J].Signal Processing,82(2002):2003~2013.
[6] 余永明.陀螺全站仪在隧道测量中的应用[J].隧道技术研究,2008:717~721.
[7] Yang Zhiqiang,Shi Zhen,Yang Jianhua,et al.The Research of Key Technology and Superiority in Magnetic Suspension Gyro Station and Application in Underground Engineering [C].The International Conference on Multimedia Technology IEEE Press,2010:1627~1629.
[8] 王忠义.磁悬浮陀螺全站仪在高速铁路隧道定向测量中的应用[J].铁道建筑与技术,2013(4):18~20.
[9] Chang H L,Xue L,Qin W,et al.An integrated mems gyroscope array with higher accuracy output[J].Sensor,2008,8 (2):2886~2899.
The Research Of Gyro Station’s Application In The Subway Tunnel Through Measurement
Gao Junhu,Qin Kuan
(Xi’an Surveying Institute,Xi’an,710054,China)
In order to improve the measurement accuracy of subway tunnels through,and by analysis of the working principle of Gyro Station,this paper analyzed the status and characteristics of China's domestic Gyro Station.And through the practical application of high-precision Gyro Station in a city’s subway tunnel through,this paper drawn conclusion of that after plus the Gyro Station surveying,the subway tunnel through directional measurement accuracy would be greatly improved.Thus to ensure the progress of the subway projection conducting smoothly.
subway tunnel through measurement;Gyro Station;traverse;directional measurement
2014—04—24
高军虎(1974—),男,工程师,主要从事测绘技术质量管理和研究。
猜你喜欢
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
空间科学学报(2020年4期)2020-04-22
工程与建设(2019年3期)2019-10-10
现代计算机(2018年19期)2018-08-01
雷达学报(2017年1期)2017-05-17
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
系统工程与电子技术(2016年2期)2016-04-16
电测与仪表(2016年9期)2016-04-12
河南科技(2015年18期)2015-11-25