遗传算法在优化高速列车自动驾驶中的应用
2014-06-21 10:49徐涛余进
城市轨道交通研究 2014年3期
徐 涛 余 进
(1.西安铁路局机务处,710054,西安;2.中国南车集团青岛四方机车车辆股份有限公司,266111,青岛∥第一作者,工程师)
0 引言
列车自动驾驶(ATO)作为列车自动控制(ATC)的子系统,一个最主要的功能就是自动调整列车速度,并能进行站内定点停车。只有好的控制方法才能在自动调整列车速度时尽可能同时满足安全、正点、舒适、节能、准确停车等各项指标。在ATO发展过程中,出现了多种控制方法,如PID(比例-积分-微分)控制以及带参数自适应的改进PID控制,它们都能在一定程度上取得较好的效果。但高速列车的运行过程是一个复杂的多变量、非线性动态过程,PID难以获得理想的结果[1]。
随着智能控制技术的发展,模糊控制、专家系统、遗传算法等逐渐应用于列车的运行控制,取得了一定的成果。日本研制了“预测型模糊控制”ATO系统[2-3];我国铁道科学研究院提出了直接模糊神经控制[4],用于ATO仿真,并将多级阶梯智能控制用于高速列车控制[5];西南交通大学提出采用模糊预测方法,分别对列车运行过程和停车建立不同的模糊模型,以此对列车进行控制[6];新加坡学者把遗传算法用于ATO仿真,用以确定最佳的惰性地点,以期达到最好的节能效果[7]。这些方法都取得了一定的成果。
本文在前人研究的基础上,将遗传算法用于优化高速列车自动驾驶运行过程,在同时满足列车的运行安全、正点、节能和停车准确的条件下,优化列车运行工况并计算相应的运行距离,以此获得最佳的列车操纵驾驶方案。仿真结果表明了该方法的有效性。
1 遗传算法优化高速列车自动驾驶过程
1.1 问题的描述
列车运行过程可由如下方程描述[7-8]:
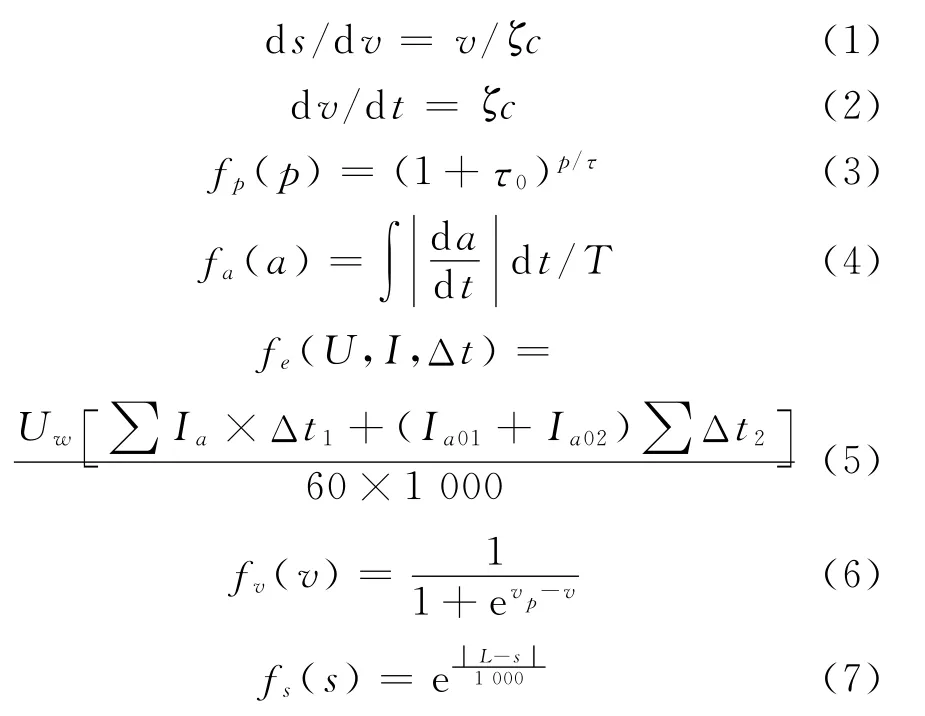
式中:
s——列车运行距离,m;
v——当前列车速度,m/s;
T——列车总运行时间,s;
α——当前列车加速度,m/s2;
c——单位合力,kN;
ζ——加速度系数,根据《列车牵引计算规程》(以下简为《牵规》),ζ=0.01;
p——晚点时间,s;
τ——可以接受的晚点时限,s;
τ0——惩罚项系数,反映晚点时间在τ范围内时,使列车正点所需要的单位能耗,W/s;
Uw——受电弓处网压,V;
Ia——牵引工况下平均有功电流,A(由《牵规》获得);
Ia01——牵引工况下列车自用电有功电流,A;
Δt1——牵引运行时间,s;
Ia02——惰行运行或制动工况时列车自用电有功电流,A;
Δt2——惰行或制动工况下的运行时间,s;
vp——当前限制运行速度,m/s;
L——线路全长,m;
fp(p),fα(α),fe(U,I,Δt),fv(v),fs(s)——分别代表正点率指标,舒适性指标,能耗指标,安全性指标,停靠准确性指标。
以上式(1)、(2)为列车运动方程,(3)、(4)、(5)、(6)、(7)式分别反映列车运行的正点率、舒适性、能耗、安全性和停靠准确性。同时考虑列车的安全性、正点、能耗、舒适性和停靠准确性的多目标优化问题,可描述为:

1.2 遗传算法的实现
遗传算法是模拟自然界遗传机制和生物进化论而形成的一种并行随机搜索最优化方法。它对参数的编码进行操作,在优化计算过程中借鉴生物学中染色体和基因等概念,模仿自然界中生物的遗传和进化机理,从由多个个体组成的一个初始种群开始最优解的搜索过程,因此可以获得较高的效率。由于遗传算法以目标函数为搜索信息在解空间进行高效并行启发式搜索,适合于大规模复杂问题的优化9。
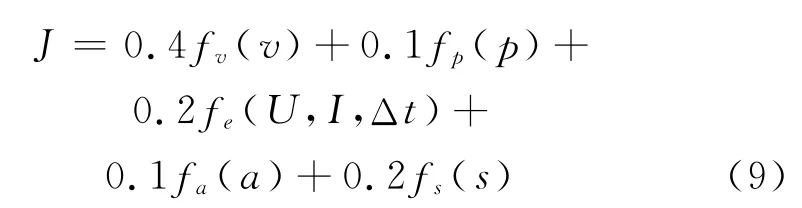
对于式(8)所示的多目标优化,本文选择权重和的方法,将其转化为单目标的优化问题。考虑到列车运行过程中的安全性,在确保准确停车的前提下尽可能地节能、提高服务质量,应按如下方式设置权重:fv(v)权重为0.4;fp(p)权重为0.1;fe(U,I,Δt)权重为0.2;fa(a)权重为0.1;fs(s)权重为0.2。
设:
则,上述多目标优化问题转化为:
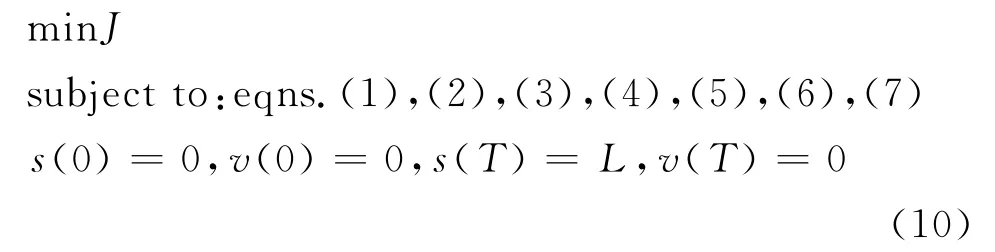
本文以列车在特定工况下运行的距离为优化目标,根据以上分析,总结采用遗传算法优化ATO步骤如下:
首先,根据《牵规》,求得列车在整个区间运行工况(牵引、惰行、制动)转换的时机地点,也就是列车在相应工况下的运行距离。通过分析,合并一些运行距离很短、不合理的运行工况。本文中合并1km以下工况,在没有区间临时限速情况下,得到列车运行工况:牵引-惰行-牵引-惰行-制动-惰行-制动。
其次,根据列车相应工况下的运行距离,确定遗传算法优化搜索空间,以式(9)所示的权重和J为适应度函数,求解式(10)所示的多目标优化问题。本文中的可行解由7组基因组成,采用72位二进制编码,各基因长度分别为11、11、10、10、10、10、10,依次对应列车在上述运行工况下的运行距离;每一基因的初始化时变化范围随前一基因取值而改变;首个基因对应着线路全长,后一基因对应于扣除前一基因取值后的线路长度,依次类推。所有基因取值之和小于或等于线路全长,遗传算法中的初始种群大小为30,进化迭代次数为100,交叉概率为0.9,变异概率为0.09,空气制动采用0.8倍全值。搜索中舍弃运行距离之和大于线路全长的解。
2 仿真试验
本文以某型高速列车为对象,研究上述方法的可行性。该型号高速列车的主要参数与特性见表1[10]。

表1 列车主要参数特性
以秦沈客运专线中某段33.769km的线路参数为依据[11](见图1),闭塞分区长度为1 500m,采用空气制动,减压130kPa,制动力取0.8倍全值。
首先由列车特性和线路参数根据《牵规》进行牵引计算,获得初步的列车运行工况和工况转换的时机地点,结果见图2、图3。

图1 某段线路纵断面

图2 列车运行工况

图3 列车运行的距离-速度曲线
图2中,纵坐标为运行工况,1为牵引;0为惰性运行;-1为制动。列车运行过程经历“牵引-惰行运行-牵引-惰行运行-牵引-惰行运行-牵引-惰行运行-制动-惰行运行-制动”,其运行工况转换过于频繁。其中3次牵引的运行距离非常短,只有600~700m。显然这不是所期望的列车驾驶方案。在图3中,运行时间为580s,停车点位置在33 739m处。
通常情况下,牵引计算获得的结果不适合直接用于指导列车驾驶,可以将其进一步优化。采用本文方法优化后的结果如图4和图5所示。
由图4、图5可以看出:经过遗传算法优化后,列车驾驶工况转换过程由原来的10次降到6次,牵引运行过程由4次减少到2次,运行时间为574.8 s,节约3.2s,停车点位置33 737m。可以进一步考虑调整正点率指标和停靠准确性指标的权重,使得列车停车位置更精确。
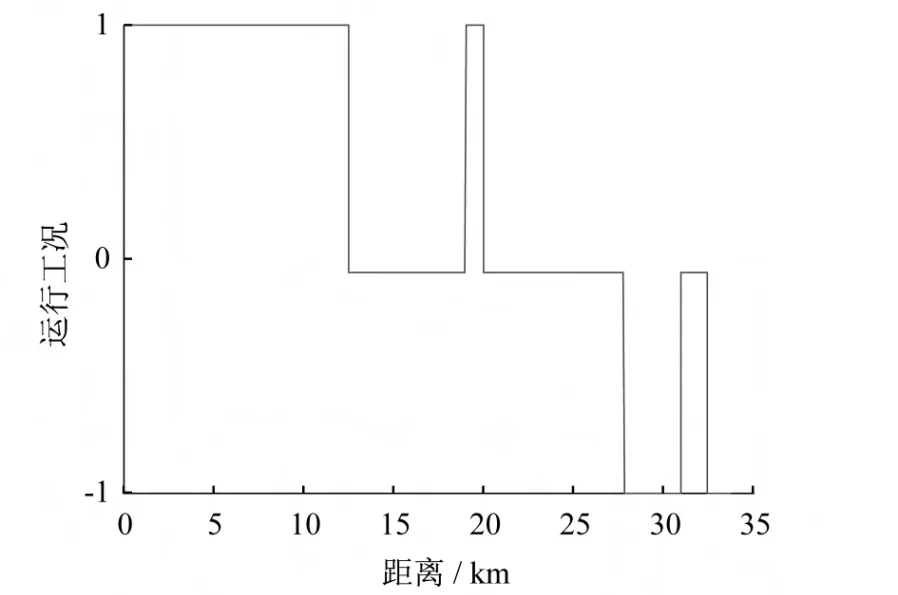
图4 优化后的列车运行工况

图5 优化后列车运行的距离-速度曲线
假设线路上有一5km长、160km/h的临时限速段,位置在15~20km处,如图6所示。采用本文方法,用遗传算法优化后的结果见图6所示。列车全程处于距离-速度监督曲线以下安全运行,运行时间为683.3s,停车点位置在33 736m。
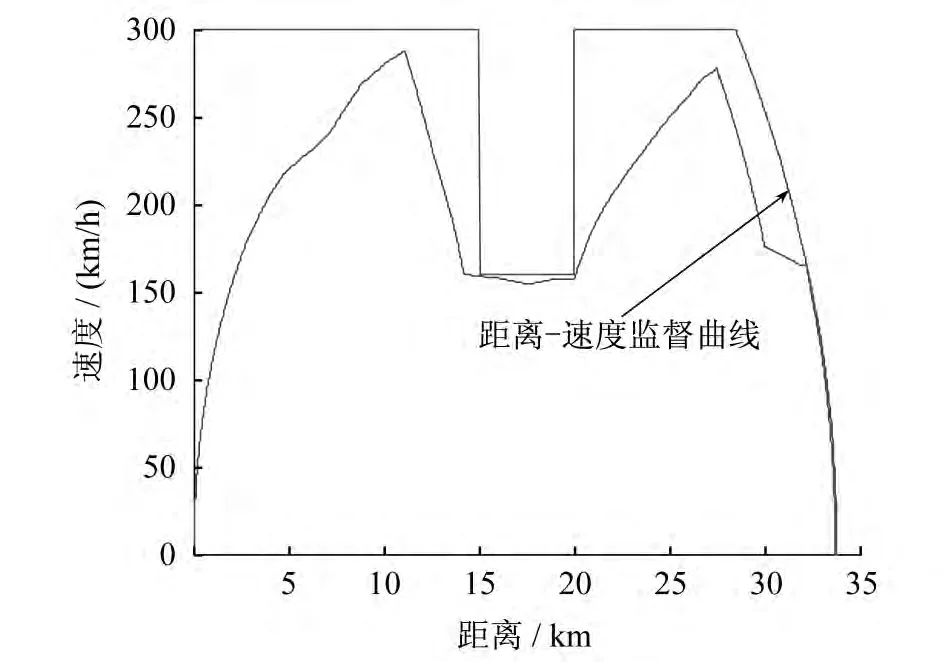
图6 有临时限速段的列车运行距离-速度曲线
3 结语
本文采用权重和方法将高速列车运行过程的多目标优化转换为单目标优化问题,在牵引计算基础上,用遗传算法对高速列车自动驾驶过程进行了优化。仿真试验结果表明,将遗传算法用于优化高速列车的自动驾驶,可以根据列车实际运行情况,调整相应指标的权重,就能够形成“赶点运行”、“正点节能运行”等不同的驾驶操纵策略,达到期望的结果。
[1]唐涛,黄良冀.列车自动驾驶系统控制算法综述[J].铁道学报,2003,25(2):98.
[2]Oshima H.Automatic train operation system based on predictive fuzzy control[C]∥Proceedings of 2nd IFSA Congress.Tokyo:[s.n],1988:485.
[3]Sekine S.Application of fuzzy neural network control to automatic train operation and tuning of its control rules[C]∥Proceedings of International Joint Conference of the 4th IEEE International Conference on Fuzzy Systems and The 2nd International Fuzzy Engineering Symposium.Yokohama,1995:1741.
[4]Wang Jing,Cai Zixiong,Jia Limin.Direct fuzzy neural control with application to automatic train operation[J].Control Theory and Application,1998,15(1):391.
[5]何兵,万百五.用于高速列车自动化的多控制器递阶智能控制研究[J].西安交通大学学报,1997,31(9):39.
[6]Feng Xiaoyun,Jia Junbo,Li Zhi.The research of fuzzy predicting and its application in train’s automatic control[J].IEEE Transaction on Decentralized System,2000,13:82.
[7]Chang C S,Sim S S.Optimizing train movements through cost control by using Genetic algorithms[C]∥IEEE.IEEE Proceedings of Electric Power Application.England:[s.n],1997:65.
[8]饶忠.列车牵引计算[M].北京:中国铁道出版社,2005.
[9]李士勇.模糊控制、神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,1998.
[10]王桌,王艳辉,贾利民,等.基于ANFIS的高速列车制动控制仿真研究[J].铁道学报,2005,27(3):113.
[11]张波,陆阳,孙剑芳,等.高速实验列车牵引实验的仿真研究[J].中国铁道科学,2004,25(3):6.
猜你喜欢
当代陕西(2020年17期)2020-10-28
铁道通信信号(2020年1期)2020-09-21
人大建设(2018年5期)2018-08-16
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
统计与决策(2017年2期)2017-03-20
铁道通信信号(2016年8期)2016-06-01
现代计算机(2016年34期)2016-02-28
智能系统学报(2015年4期)2015-12-27
应用科技(2015年5期)2015-12-09
中国铁道科学(2015年6期)2015-06-21