基于模糊PID的无人水面艇直线路径跟踪
2014-06-07 05:53王建华吴玉平
计算机工程 2014年10期
杨 钊,王建华,吴玉平
(上海海事大学航运技术与控制工程交通行业重点实验室,上海201306)
基于模糊PID的无人水面艇直线路径跟踪
杨 钊,王建华,吴玉平
(上海海事大学航运技术与控制工程交通行业重点实验室,上海201306)
针对固定参数PID方法在无人水面艇直线路径跟踪控制中出现的大迴转问题,提出一种基于模糊PID的直线路径跟踪方法。在系统中增加模糊推理模块,利用航向与跟踪直线之间的偏差角以及无人艇位置与跟踪直线之间的距离误差,根据模糊推理的方法动态地调整PID参数。通过PID控制器实时调整左右两侧推进电机的输入电压,实现对给定直线路径的自主跟踪。仿真结果表明,在初始航向偏差角较大时,该方法克服了采用固定参数PID控制方法时出现的大迴转现象;在初始航向偏差角较小时,该方法在超调量以及调节时间方面的直线跟踪性能优于固定参数PID控制方法。
无人水面艇;直线路径跟踪;模糊推理;PID控制器;距离偏差;角度偏差
1 概述
无人水面艇(Unmanned Surface Vessel,USV)是一种可以在复杂海洋环境中执行各种任务的智能化无人平台[1],它可以代替人类在海洋中完成一些危险任务。20世纪90年代,国外关于USV的研究项目大量出现[2],美国和以色列等国家在这方面处于领先地位[3-5],例如美国的“Spartan”,以色列的“Protector”,它们既能自主航行也可遥控操纵,装备有摄像机、导航雷达、GPS等设备。在民用方面,麻省理工(MIT)的AUV实验室在海洋基金项目资助下研发了一系列的水面机器人,用于各种不同的任务。在MIT研究项目的鼓舞下,英国、意大利、葡萄牙等国家已研制出多种水面机器人,应用于海洋环境监测、水文勘测、水上网络组建和水面溢油处理等领域[6]。国内起步比较晚,相对国外差距较大,而且国内的无人水面艇研究大都在遥控的阶段,无人水面艇的智能化关键技术方面还很薄弱,因此在无人水面艇智能化方面的前瞻性技术探索和研究不仅很有必要,而且十分紧迫[7]。无人水面艇的自主路径跟踪是实现无人水面艇智能化的关键技术之一[8-9],而直线跟踪是路径跟踪的基础。
关于无人水面艇路径跟踪的研究已有较多文献,文献[10]针对无人滑行艇的航向跟踪非线性系统,提出了一种反步自适应滑模控制方法,并在设计中考虑到了未知误差以及环境干扰的影响。文献[11]针对无人水面艇具有非线性、强耦合、时变的特点结合模糊控制及神经网络的优点设计了模糊神经网络控制系统,通过控制喷泵喷射角度来控制航向。文献[12]针对欠驱动船舶航行中存在风、浪、流等因素干扰的情况提出了一种鲁棒路径跟踪控制算法。文献[13]针对采用喷水推进器的高速无人水面艇的强非线性,采用神经网络和模糊PID控制器相结合的方法控制喷泵喷射角以及柴油机转速实现对无人水面艇快速、精确的控制。文献[14]针对洋流干扰的情况下,提出了一种基于 LOS(Line-of-Sight)的控制方法。文献[15]采用基于LOS的预测模型控制方法对无人水面艇进行控制。文献[16]针对欠驱动无人水面艇设计了一种新的非线性控制器,包括导航模块和非线性控制器模块,经过仿真该控制器满足预期要求。文献[17]利用滑模控制方法设计了轨迹跟踪控制器,并进行了实验验证。实验结果表明,该方法能跟踪直线以及圆形轨迹[18],描述了一个小型低成本海洋探测型ASV的工程设计方法,该设备采用GPS辅助航点指引;控制系统主要由采用PD控制器的自动舵系统和基于GPS的LOS规划系统构成,并且进行了海上实验。本文在上述研究的基础上,提出一种基于模糊PID的直线路径跟踪方法。
2 相关研究
在上海市科委的资助下,上海海事大学航运技术与控制工程交通行业重点实验室研制出了一种具有完全自主知识产权的无人水面艇[19],如图1所示。

图1 无人水面艇实物图
该无人水面艇的动力为两台位置固定的水下电动推进器,通过控制两侧螺旋桨的转速差来控制航向,螺旋桨由直流电动机驱动。经水上实验验证该无人水面艇能够在手动遥控的情况下进行包括港口监控、水质采样、水文勘察、海事搜救等任务。目前正在进行该无人水面艇自主航行的研究,文献[20]采用PID控制方法实现该无人水面艇的直线路径跟踪控制,但PID控制器在无人水面艇初始航向角和跟踪路径倾斜角偏差较大时会出现大迴转现象,如图2所示,其中φ为无人水面艇的起始航向角与直线路径倾斜角的偏差。针对这个问题以及实验对象的特点,本文采用模糊PID方法,根据输入进行模糊推理,在线调整PID参数,实验结果表明,该方法能有效避免大迴转现象的发生,而且直线跟踪性能优于PID控制器。

图2 PID算法大迴转现象
3 基于模糊PID的USV直线路径跟踪方法
3.1 系统结构
系统结构如图3所示,无人水面艇上装有GPS装置,可以动态地获得航向角θ及当前经纬度坐标值。模糊PID控制器主要分为4部分,分别为距离计算器、角度偏差比较器、PID控制器以及模糊推理模块。
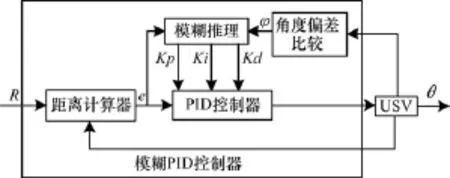
图3 系统结构
在图3中,R为指定路径;e为无人水面艇与目标路径的距离误差。模糊推理模块利用距离偏差e以及航向角偏差φ在线调整PID参数值,其输出是PID各参数的值。PID控制器利用调整后的PID参数和当前误差,计算出左右电动推进器的控制电压。
3.2 距离及角度偏差计算
本文采用向量叉积方法计算距离误差,如图4所示。

图4 距离及角度偏差计算示意图
设A,B,O3点的坐标分别为:

其中,AB,AO,i,j,k均为向量。
令e=(x2-x1)(y3-y1)-(x3-x1)(y2-y1)如果A,B,O3点是逆时针分布,则e为正值;若为顺时针分布,则e为负值。可以根据计算结果的符号来判断无人水面艇在路径的左侧或右侧,同时又可以根据偏差绝对值的大小来判断无人水面艇与目标路径的距离误差。角度偏差即航向偏差角φ,表示航向角与直线倾斜角的偏差,其计算公式如下:

其中,θ为无人水面艇航向角;α为直线路径倾斜角。
3.3 PID控制器
本文中的PID控制器输入为无人水面艇与目标路径的距离误差e,利用模糊控制器调整PID参数,计算出左右电动推进器的控制电压U。PID控制器时域输出如式(3)所示:

其中,e(t)为t时刻无人水面艇与目标路径的距离误差,Kpl,Kil,Kdl分别为左侧电机调速时所用的PID各参数值;Kpr,Kir,Kdr分别为右侧电机调速时所用的PID各参数值,U(t)l,U(t)r分别表示在t时刻左侧和右侧电机的电压值。
将其离散化可化为:

其中,e(k)为k时刻无人水面艇与目标路径的距离误差;Ulk与Urk分别表示在k时刻左侧和右侧的电压值。增量式PID控制算法方程如下:

其中,ΔUlk,ΔUrk分别表示k时刻左侧和右侧施加于电机上的电压增量。
3.4 模糊推理
本文利用航向偏差角φ以及距离偏差e作为模糊控制器的输入语言变量,PID参数值为输出的语言变量。定义航向偏差角φ的基本论域为(-2, -1,0,1,2),定义其模糊子集为{NB,NS,ZO,PS, PB}。定义距离偏差e及 PID各参数的论域为(-3,-2,-1,0,1,2,3)。定义它们的模糊子集为{NB,NM,NS,ZO,PS,PM,PB}。在进行模糊推理前首先要将基本论域范围内连续的变化量进行离散化变换[21]。因此设航向偏差角φ的变化范围为[-2 2],如果不在此区间可通过线性变化式(7)将任意连续范围[a b]转化到[-2 2]。设距离偏差e的变化范围为[-3 3],如不在此区间可通过线性变化式(8)将任意连续范围[c d]转化到[-3 3]。以三角形函数建立隶属度函数。以左侧电机调速时的PID参数为例建立推理规则表,如表1~表3所示。


表1 Kpl模糊推理规则
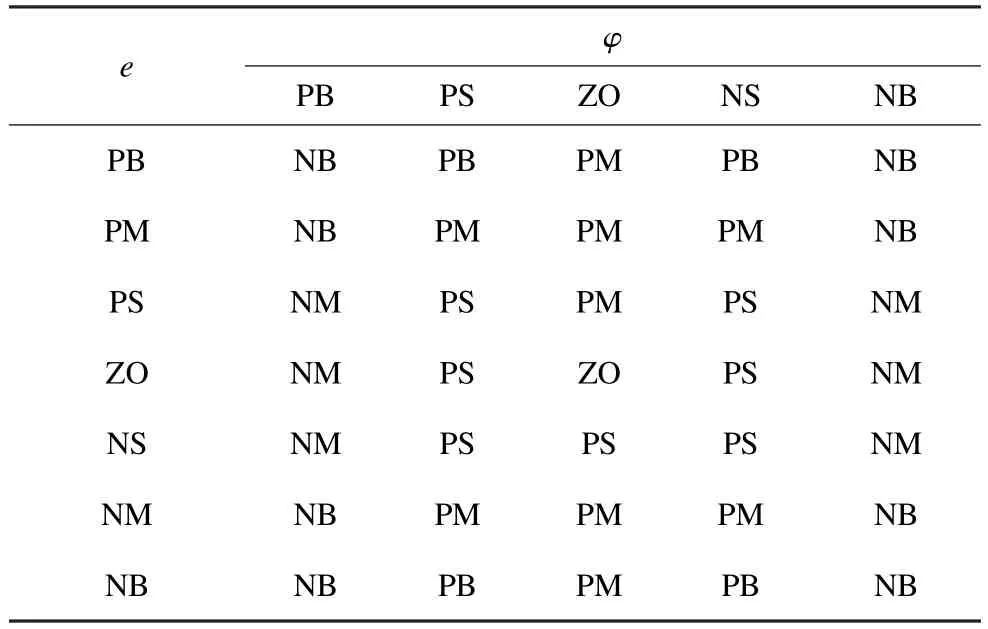
表2 Kpl模糊推理规则表
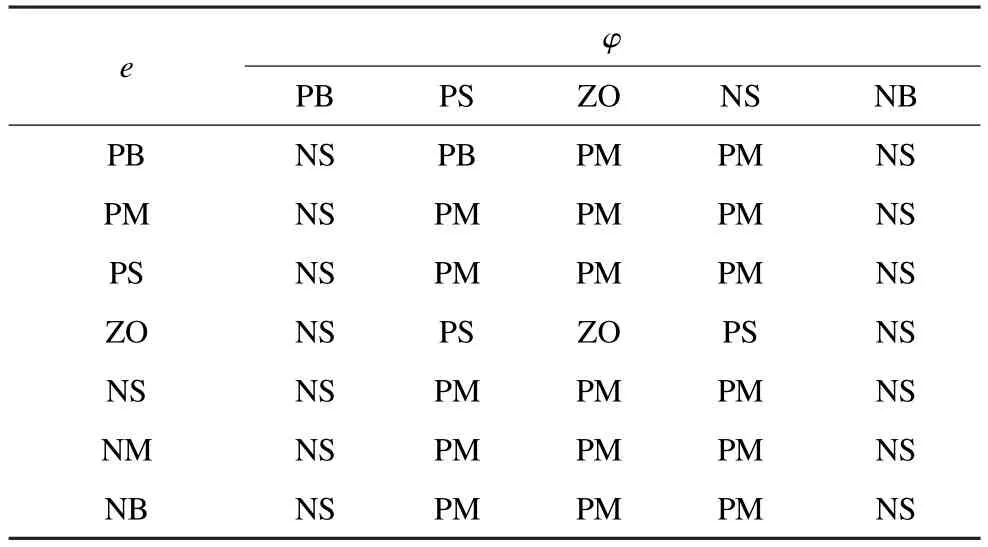
表3 Kdl模糊推理规则
当系统正常运行时,利用航向偏差角φ以及距离偏差e与PID参数之间的模糊关系动态地调整PID的参数值,以获得比较理想的动态及静态特性。
4 仿真实验
为了验证本文所述方法的性能,分别取直线斜率为正、为负、无穷大和0这4种情况,在每种情况下无人水面艇起点分别在直线两侧,并设起始位置的φ分别为П/3,0,-П/3,仿真结果如图5所示,其中,A,B分别为无人水面艇在直线两侧的起点。

图5 不同情况仿真实验结果
从以上仿真可看出,本文方法在直线斜率、USV起点及起始角不同的情况下都有很好的跟踪效果,表明本文算法具有较好的适应性。
在起始航向偏差角φ较大的情况下对本文方法和PID方法进行仿真对比,图6是在无人水面艇起始点(2,8),φ为5П/4时跟踪路径2,以及φ为11П/12时跟踪路径1的仿真对比。
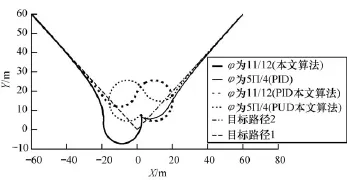
图6 大起始航向偏差角情况对比仿真结果
结果显示PID控制器在无人水面艇起始航向偏差角较大时出现大迴转现象,本文方法避免了这一现象发生。
在前面实验的基础上对PID以及本文算法进行定量分析,对比仿真如图7所示。

图7 定量分析仿真对比
图7 中无人水面艇初始位置为(2,28),φ分别为П/4,П/3,П/2时的跟踪路线,性能指标对比如表4所示。
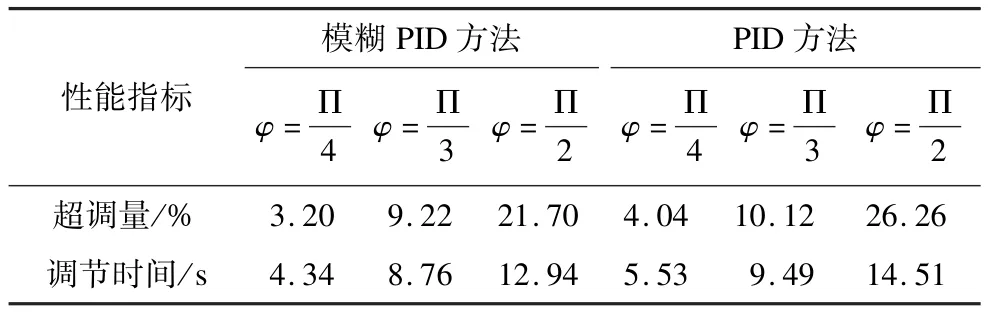
表4 性能指标对比
由表4中的定量分析可看出,模糊PID方法与PID方法相比降低了超调量并且缩短了调节时间。
本文方法之所以优于PID方法的原因是模糊PID能根据实时的情况,利用模糊规则来动态整定PID参数。而PID算法各项参数固定,不能实时调整。以图7中航向偏差角度φ为П/3的路径跟踪仿真为例,其PID各参数的动态变化如图8所示。
由于模糊PID方法可以在线调整PID参数,与PID方法相比它可以适应更多的环境,并获得更优化的效果。

图8 PID参数动态变化结果
5 结束语
本文采用模糊PID方法进行无人水面艇的直线路径跟踪,利用航向偏差角以及距离误差,根据模糊推理规则动态调整PID的参数,进而通过PID控制器调整无人水面艇的运动姿态,实现直线路径的自主跟踪。仿真实验结果表明,该方法能够跟踪不同斜率的直线路径,克服了PID控制器在无人水面艇初始航向角与直线路径倾斜角偏差较大时跟踪路径出现的大迴转现象,在超调量和调节时间等方面的跟踪性能优于PID控制器。
[1] 徐玉如,肖 坤.智能海洋机器人技术进展[J].自动化学报,2007,33(5):518-521.
[2] Bertram V.Unmanned SurfaceVehicles——A Survey [EB/OL].(2008-10-21).http://www.skibsteknis kselskab.dk/public/documenter/Skibsteknisk/Download% 20materiale/2008/10%20marts%2008/USVsurvey_DTU. pdf.
[3] 李家良.水面无人水面艇发展与应用[J].火力与指挥控制,2012,37(6):203-207.
[4] 廖煜雷.无人水面艇的非线性运动控制方法研究[D].哈尔滨:哈尔滨工程大学,2012.
[5] Navy U S.The Navy Unmanned Surface Vehicle(USV) Master Plan[EB/OL].(2007-10-10).http://www. navy.mil/navydata/technology/usvmppr.pdf.
[6] Manley J.Unmanned Surface Vehicles,15 Years of Development[C]//Proc.of OCEAN’08.[S.1.]: MTS/IEEE Press,2008:214-219.
[7] 中国尚在起步阶段智能是最大难点[N].科学时报, 2008-10-31.
[8] Bibuli B M,Caccia M,Lapierre L,et al.Guidance of Unmanned Surface Vehicles[J].IEEE Robotics and Automation Magazine,2012,19(3):92-102.
[9] Bibuli M,Bruzzone G,Caccia M,et al.Line Following Guidance Control:Application to the Charlie Unmanned Surface Vehicle[C]//Proc.of2008 IEEE/RSJ InternationalConference on IntelligentRobots and Systems Acropolis Convention Center.Nice,France: [s.n.],2008:3641-3646.
[10] 廖煜雷,庞永杰,庄佳园.喷水推进型无人水面艇航向跟踪的反步自适应滑模控制[J].计算机应用研究, 2012,29(1):82-84.
[11] 陈鸶鹭,程海边.基于模糊神经网络控制的水面无人水面艇建模与仿真[J].舰船科学技术,2010,32(11): 136-136.
[12] 王晓飞,张葆华,褚德英,等.基于解析模型预测控制的欠驱动船舶路径跟踪控制器设计[J].船海工程, 2012,41(1):135-137.
[13] 高 双,朱齐丹,李 磊.基于神经网络的高速无人水面艇模糊PID控制[J].系统仿真学报,2007,19(4): 776-779.
[14] Børhaug E,Pavlov A,Pettersen K Y.Integral LOS Control for Path Following of Underactuated Marine Surface Vessels in the Presence of Constant Ocean Currents[C]//Proc.of the 47th IEEE Conference on Decision and Control.Cancun,Mexico:[s.n.],2008: 4983-4991.
[15] Oh S R,Sun Jing.Path Following of Underactuated MarineSurface VesselsUsing Line-of-sightBased Model Predictive Control[J].Ocean Engineering,2010, 37(1):289-295.
[16] Daly J M,Tribou M J,Waslander S L.A Nonlinear Path Following Controller for an Underactuated Unmanned Surface Vessel[C]//Proc.of 2012 IEEE/RSJ InternationalConference on IntelligentRobots and Systems.Algarve,Portugal:[s.n.],2012:82-87.
[17] Ashrafiuon H,Muske K R,Mcninch L,et al.Sliding Model Tracking Control of Surface Vessels[J].IEEE Transactions on Industrial Electronics,2008,55(11): 4004-4011.
[18] Maurya D E,Pereira E P.A Small Autonomous Surface Vehicle for Ocean Color Remote Sensing[J].IEEE Journal of Oceanic Engineering,2007,32(2):353-364.
[19] 熊亚洲,张晓杰,冯海涛,等.一种面向多任务应用的无人水面艇[J].船舶工程,2012,34(1):16-19.
[20] 张晓杰.无人水面艇的路径跟踪方法研究[D].上海:上海海事大学,2012.
[21] 王述彦,师 宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011,30(1):166-172.
编辑 索书志
Straight Line Path Following of Unmanned Surface Vessel Based on Fuzzy PID
YANG Zhao,WANG Jian-hua,WU Yu-ping
(Key Laboratory of Marine Technology and Control Engineering,Ministry of Communications, Shanghai Maritime University,Shanghai 201306,China)
In order to avoid the big gyration that may occur when the PID controller is used to the Unmanned Surface Vessel(USV),a straight line path following control method based on fuzzy PID is presented.Using the angle deviation between course angle and the straight line as well as the distance deviation between the USV and the path as input,the fuzzy algorithm is used to adjust the PID parameters dynamically,and the PID controller outputs the control voltage of the motors driving the propellers,so that the USV can track the straight line.Simulation results show that the proposed method can avoid the big gyration that appears when PID controller is used at large initial deviation of course angle.In comparison with PID controller,the fuzzy PID has better performance in overshoot and regulation time at small initial angle deviations.
Unmanned Surface Vessel(USV);straight line path following;fuzzy inference;PID controller;distance deviation;angle deviation
1000-3428(2014)10-0270-05
A
TP391
10.3969/j.issn.1000-3428.2014.10.050
上海市科技攻关计划基金资助项目(11dz1205600);上海市教委科研创新计划基金资助项目(14YZ104)。
杨 钊(1989-),男,硕士研究生,主研方向:船舶与港口自动化技术;王建华,副教授、博士;吴玉平,硕士研究生。
2013-09-26
2013-11-25E-mail:zhaoyang0373@gmail.com
中文引用格式:杨 钊,王建华,吴玉平.基于模糊PID的无人水面艇直线路径跟踪[J].计算机工程,2014, 40(10):270-274,280.
英文引用格式:Yang Zhao,Wang Jianhua,Wu Yuping.Straight Line Path Following of Unmanned Surface Vessel Based on Fuzzy PID[J].Computer Engineering,2014,40(10):270-274,280.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
课外生活(小学1-3年级)(2020年2期)2020-03-09
民用飞机设计与研究(2019年4期)2019-05-21
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
摄影之友(影像视觉)(2017年8期)2017-11-27
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
电子制作(2017年24期)2017-02-02