基于双坐标系的采煤机截割路径平整性控制方法
2014-06-07 05:55王忠宾刘新华
煤炭学报 2014年3期
周 信,王忠宾,谭 超,刘新华,季 瑞
(中国矿业大学机电工程学院,江苏徐州 221116)
基于双坐标系的采煤机截割路径平整性控制方法
周 信,王忠宾,谭 超,刘新华,季 瑞
(中国矿业大学机电工程学院,江苏徐州 221116)
针对当前综采工作面采煤机截割路径不平整问题,提出一种基于双坐标系的采煤机截割路径控制方法。通过对影响采煤机截割路径平整性的主要因素进行分析,建立了双坐标系下的采煤机滚筒高度控制模型;为满足滚筒高度变化的连续性控制要求,设计了基于微分理论的摇臂倾角控制算法;以现场采样数据为输入,对采煤机截割路径控制方法进行仿真,结果显示:与未使用平整性控制方法之前相比,采煤机前、后滚筒截割路径上的最大高度差分别减小了93.3%和97.6%,标准偏差分别减小了95.6%和97.2%。因此,提出的方法能够有效改善采煤机截割路径的平整性,可对综采工作面自动化生产提供参考。
采煤机;截割路径;双坐标系;平整;微分控制
综合机械化采煤过程中,采煤机、液压支架和刮板输送机等综采设备随着工作的推进处于不断推移的状态[1-2]。采煤机截割路径不平整会导致刮板输送机推移阻力增大、液压支架支护不到位等问题,容易造成生产中断,严重时还会造成设备损坏和人员伤亡[3-4]。因此,保证采煤机截割路径的平整性对于提高煤矿生产效率、降低生产风险具有重要的意义[5-6]。
对于采煤机滚筒截割高度调整方法,相关科研人员进行了大量研究。张俊梅等[7-8]致力于开发新型传感器和新的信息融合算法,以期精确识别煤岩界面,并以此为依据对采煤机滚筒进行实时调高;梁义维等[9-10]研究了基于历史数据和智能控制算法的滚筒自动调高方法;刘春生等[11-13]对采煤机记忆截割的程控方法进行了控制策略和算法仿真研究;徐志鹏等[14-15]研究了基于模糊控制理论的采煤机滚筒自适应控制方法。虽然对于滚筒调高的研究有很多,但是专门针对采煤机截割路径平整性控制的方法还不多见。
本文提出了一种基于双坐标系的采煤机截割路径平整性控制方法。首先,根据采煤机初始阶段的运行参数建立静态参考坐标系;然后,在采煤机运行过程中,以静态参考坐标系为参照标准,分析不同动态坐标系下滚筒高度相对静态参考坐标系的变化关系。最后,根据变化关系和微分理论的连续条件,研究动态运行坐标系中采煤机摇臂倾角的连续性控制方法,从而实现采煤机滚筒自动调高,以满足采煤机截割路径的平整性要求。
1 双坐标系的建立
1.1 静态参考坐标系
在采煤机动态运行过程中,对截割路径进行平整性控制的困难之一在于缺少合适的参考标准,本文建立了静态坐标系作为动态运行坐标系的参考坐标系。静态参考坐标系倾角参数值的确定可以根据事先测得的煤层倾角确定[16],也可以根据采煤机机载传感器采集到的数据进行计算,如使用极值法对静态参考坐标系的倾角参数值θ进行计算:

其中,αi为传感器采集到的机身倾角值,也可以结合现场实际情况选择其他计算方法。设某一时刻静态参考坐标系中的倾角参数值为θ,如图1所示。
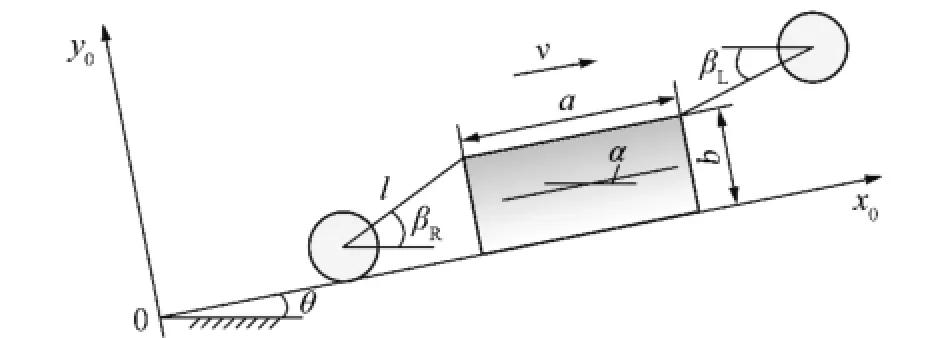
图1 静态参考坐标系Fig.1 Staic referential coordinate
如图1所示,对采煤机几何参数和传感参数进行如下定义:a为采煤机机身长度,左、右摇臂与采煤机机身铰接点中心之间的距离;b为采煤机机身高度,采煤机机身底部到摇臂与机身铰接点中心之间的距离;l为左右摇臂长度,铰接点中心和采煤机滚筒中心之间的距离;α为机身倾角,采煤机相对水平面的倾角;βL为左摇臂倾角,左摇臂相对水平面的倾角; βR为右摇臂倾角,右摇臂相对水平面的倾角。
1.2 动态运行坐标系
当机身倾角随着综采工作面底板起伏变化时,以采煤机机身倾角变化情况为依据,建立动态运行坐标系,动态运行坐标系的倾角参数值等于当前机身倾角参数值。由于综采工作面起伏的不确定性,采煤机所在动态坐标系的变化趋势也是不确定的[17-18]。根据微分控制条件要求,将采煤机所在动态坐标系的变化情况分为以下4种:
(1)动态运行坐标系倾角参数值在小于或等于静态参考坐标系倾角参数值范围内变化时,即|αi-1|, |αi|≤|θ|,如图2(a)所示。
(2)动态运行坐标系倾角参数值在大于或等于静态参考坐标系倾角参数值范围内变化时,即|αi-1|, |αi|≥|θ|,如图2(b)所示。
(3)动态运行坐标系倾角参数值变化前小于静态参考坐标系倾角参数值,变化后大于静态坐标系倾角参数值,即|αi-1|<|θ|,|αi|>|θ|,如图2(c)所示。
(4)动态运行坐标系倾角参数值变化前大于静态参考坐标系倾角参数值,变化后小于静态坐标系倾角参数值,即|αi-1|>|θ|,|αi<|θ|,如图2(d)所示。
图2(a),(b)所示动态运行坐标系中,采煤机姿态的连续变化可以直接通过微分理论进行控制;图2(c),(d)所示动态运行坐标系中,采煤机机身倾角的变化过程超出了静态参考坐标系的倾角参数值范围,需要将变化过程分成两个子过程进行控制,分别与图2(a),(b)所示变化过程相对应。
2 截割过程分析与动态控制方法
2.1 截割过程分析
采煤机截割过程中,机身倾角随煤层倾角变化而改变,由于摇臂与机身之间存在铰接关系,滚筒的截割高度也随之发生改变[19]。下面以采煤机后滚筒为例,分析机身倾角变化对截割路径的影响。
如图3所示,采煤机机身倾角由α1变化为α2,采煤机摇臂倾角随着机身倾角变化由βR1变化为βR2,采煤机滚筒中心位置高度随着机身倾角变化由hR1变化为hR2。
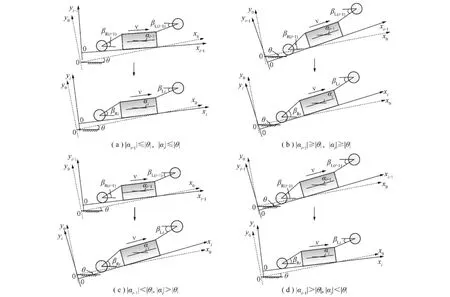
图2 动态运行坐标系变化过程Fig.2 Changing process of the dynamic running coordinates
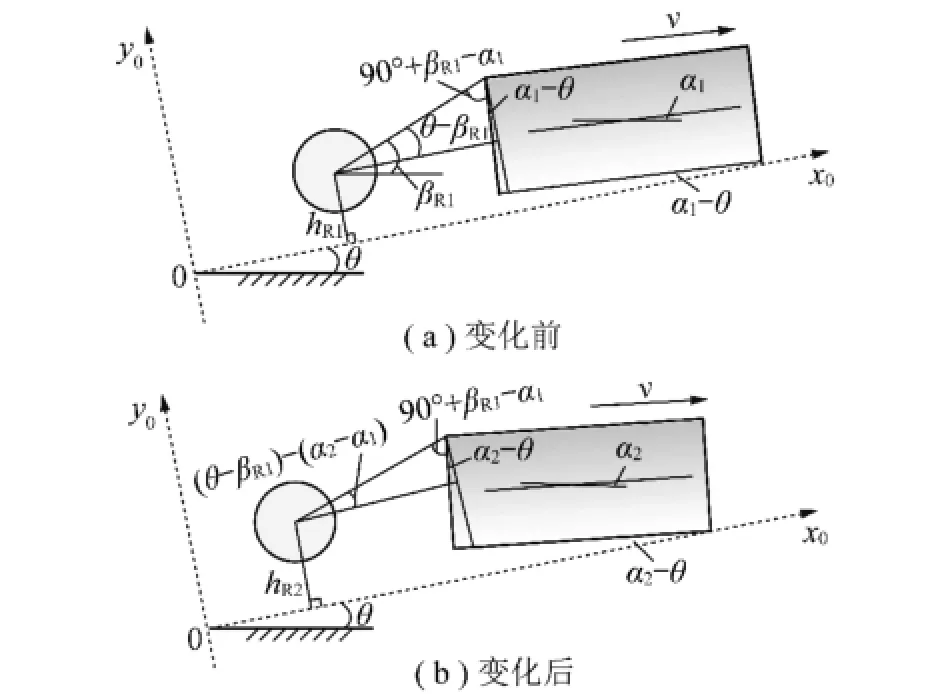
图3 采煤机后滚筒高度变化过程Fig.3 Height variation process of shearer’s rear drum
图3(a)中,采煤机后滚筒中心距地面的高度hR1为

图3(b)中,采煤机机身倾角由α1变化为α2,摇臂与机身之间的夹角保持不变,为90°+βR1-α1。此时,采煤机后滚筒中心距地面的高度hR2为

当采煤机由图3(a)状态变化为图3(b)状态时,采煤机后滚筒中心距离地面的高度变化ΔhR1为

由图3(a)和图3(b)可知,对滚筒中心距离地面高度的计算都是在静态参考坐标系中进行的,保证了计算结果的一致性。
2.2 连续性微分控制
机身倾角发生变化后,通过调节摇臂角度,使滚筒中心在静态参考坐标系中的高度保持不变,即无论动态运行坐标系如何变化,都可以以静态参考坐标系为参照坐标系对处于不同动态运行坐标系中的滚筒高度进行调节,满足截割路径平整性要求的目的。对于图3(b)中因为机身倾角变化产生的高度变化ΔhR1,通过调节摇臂倾角,使得滚筒在静态参考坐标系中的高度保持不变,如图4所示。
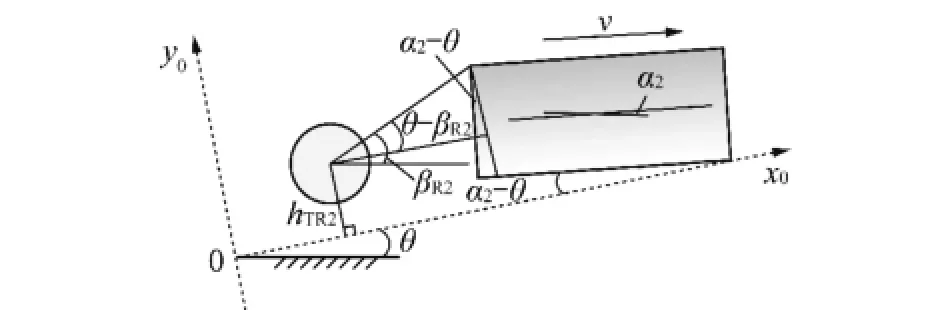
图4 调节摇臂倾角后的滚筒高度Fig.4 Height of the shearer’s rear drum with adjusting
当机身倾角由α1变化为α2时,采煤机摇臂倾角随着机身倾角变化由βR1变化为βR2,调节右摇臂倾角由βR2变化为βTR2,滚筒中心高度随着右摇臂倾角变化由hR2变化为hTR2。
图4中,调节后的采煤机滚筒中心距地面高度hTR2为

调节摇臂倾角过程中,采煤机后滚筒中心距离地面的高度变化ΔhR2为

为了获得较为平整的截割路径,应满足:ΔhR1= ΔhR2也即hR1=hTR2:

对于固定的静态参考坐标系倾角参数值θ,sin θ, cos θ是确定的值,本文中,设sin θ=k1,cos θ=k2。
根据图3中采煤机所处的位置关系,有:

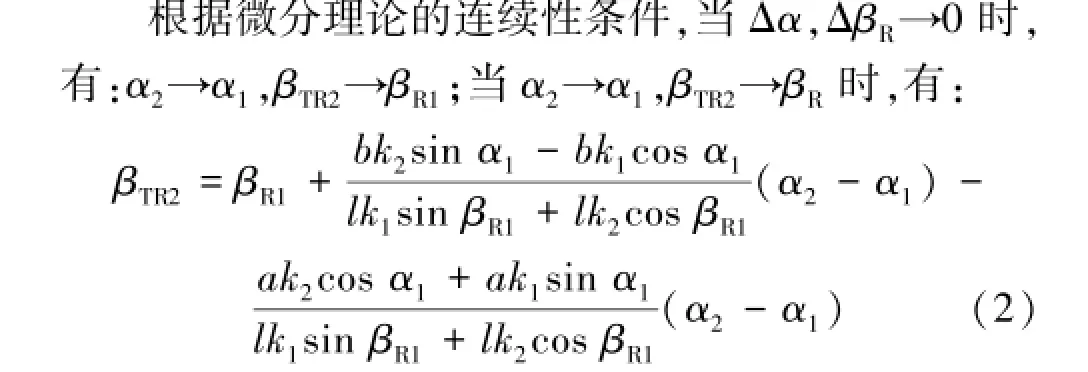
因此,当机身倾角在|α|≤|θ|范围内变化时,可按照式(2)对摇臂倾角进行实时调节,调整采煤机滚筒截割高度,保持采煤机滚筒截割路径基本平整。
2.3 动态调节方法
对应采煤机在不同倾角参数区间的变化,其动态调节方法也存在差别。采煤机截割路径的平整性控制实现过程如图5所示。
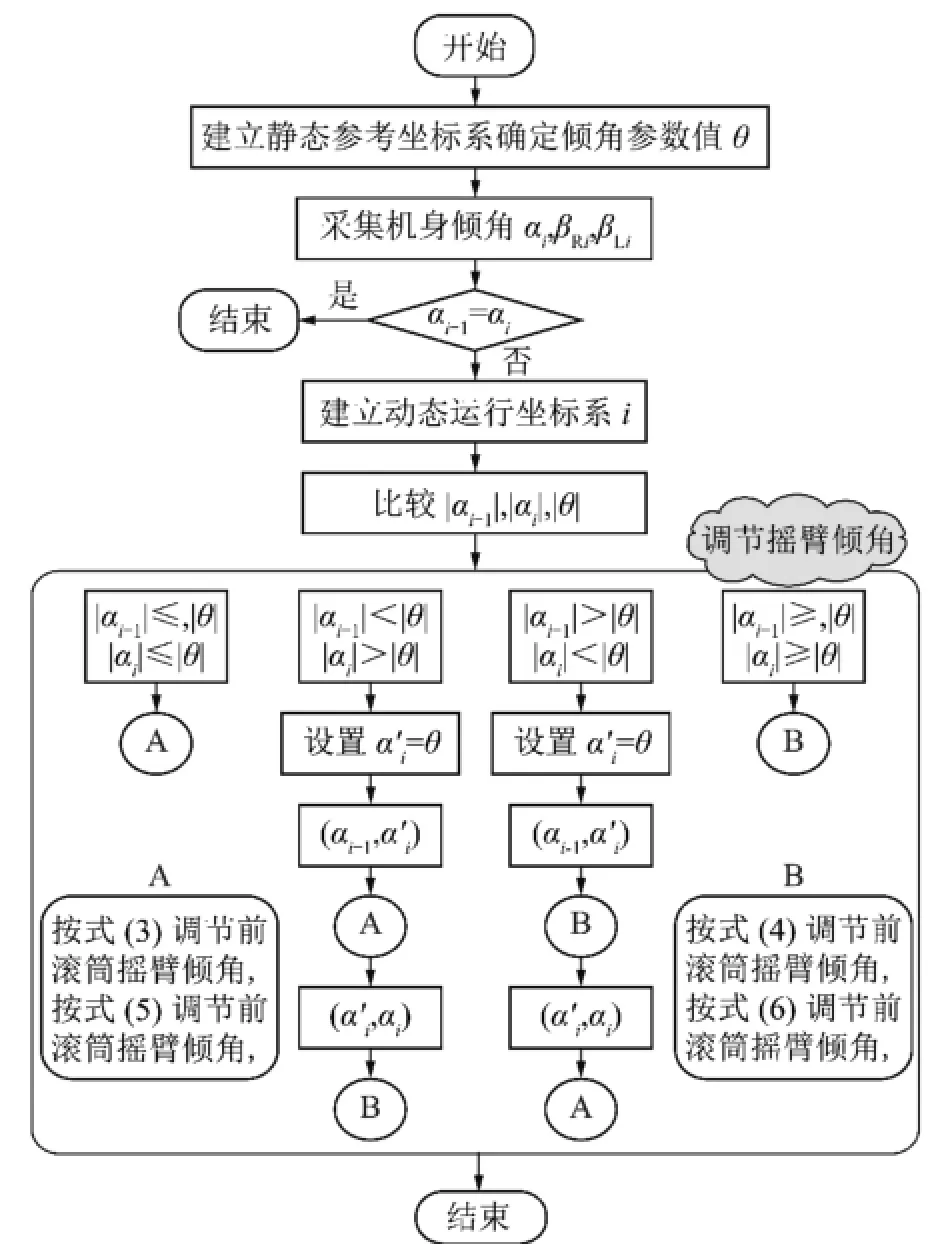
图5 截割路径平整性控制流程Fig.5 Dynamic planning flow for the cutting path
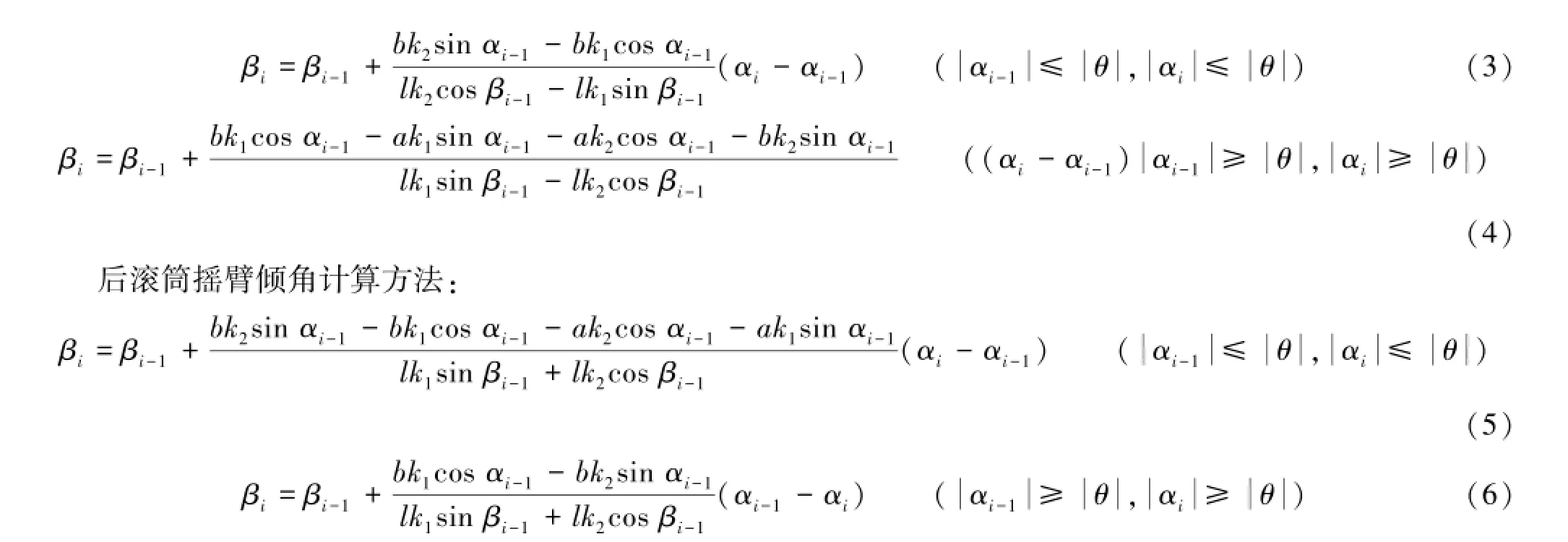
根据式(1)的结果计算方法,对处于不同区间变化的调节方法进行类似计算,得出前滚筒摇臂倾角计算方法:
3 实验验证
以中国平煤神马集团股份六矿22210工作面为实验场所,对现场数据进行采集和分析。在采煤机左、右摇臂和机身内部安装倾角传感器,分别测量采煤机左、右摇臂倾角和机身倾角,倾角传感器安装位置如图6所示。
采煤机运行时,以1 Hz的采样频率采集采煤机左、右摇臂倾角值和机身倾角值,根据采煤机几何参数和传感参数计算出前、后滚筒高度值[20]。在此基础上,采用本文提出的基于双坐标系的截割路径平整性控制方法进行仿真实验。
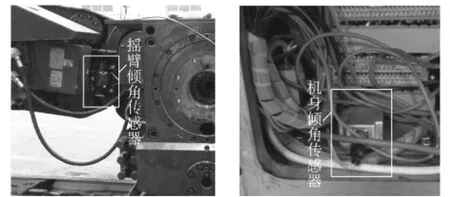
图6 倾角传感器安装Fig.6 Installation of the angle sensors
仿真实验通过控制采煤机摇臂倾角的变化,补偿因机身倾角变化引起的滚筒高度变化,实现以平整性为目的的采煤机截割路径控制。根据倾角传感器采集到的机身倾角参数值,得出采样区间内的机身倾角的最小值为-4.51°,选择静态参考坐标系的倾角参数为-4°。对提出的方法进行仿真验证,采样范围内的仿真实验输出结果如图7所示。
对仿真结果进行统计分析得出采煤机截割路径平整性控制效果见表1。
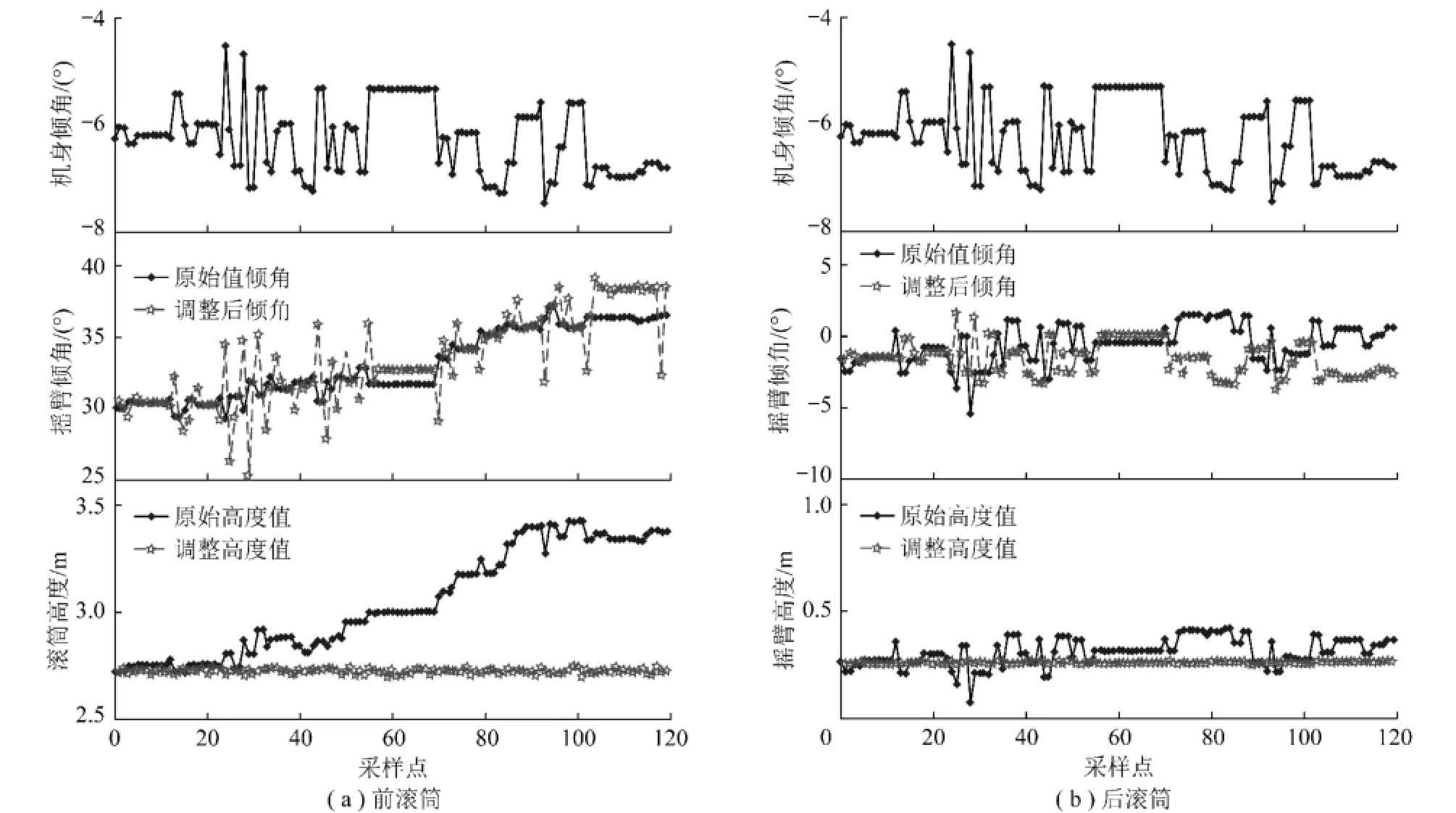
图7 前、后滚筒仿真结果Fig.7 Simulation results of the front and rear drum
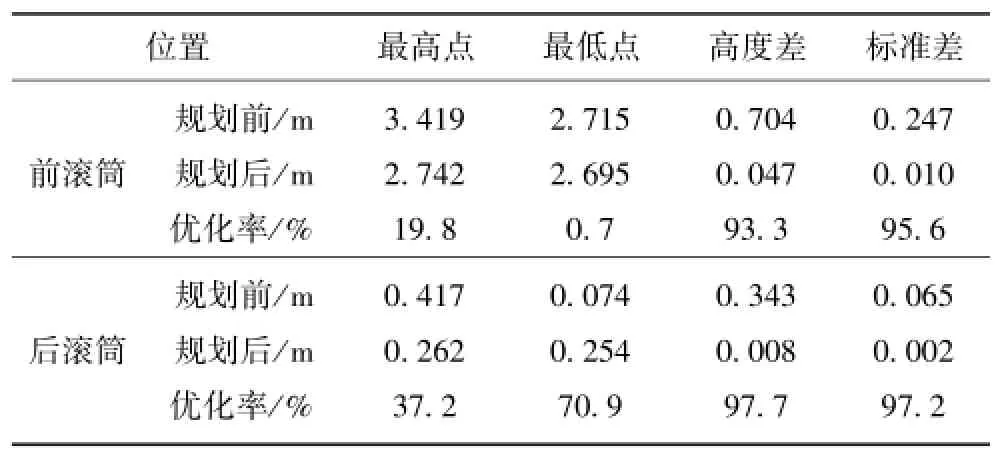
表1 前、后滚筒截割路径规划效果Table 1 Cutting path planning results of the frontand rear drum
由统计结果可以看出,使用控制方法前综采工作面采煤机截割顶板的平整度较差,容易出现顶板支护不到位的情况;底板截割路径起伏明显,不利于刮板输送机设备的推移和液压支架拉架等动作的实现。使用本文提出的方法对滚筒截割高度进行实时控制后,前滚筒的截割路径高度差由原来的0.704 m减小为0.047 m,减小了93.3%,标准偏差由原来的0.247 m减小为0.010 m,减小了95.6%;后滚筒的截割路径高度差由原来的0.343 m减小为0.008 m,减小了97.7%,标准偏差由原来的0.065 m减小为0.002 m,减小了97.2%,有效改善了采煤机截割路径的平整性。
4 结 论
(1)针对综采工作面采煤机截割路径的平整性需求,提出了静态参考坐标系和动态运行坐标系的概念,并在此基础上研究了采煤机滚筒高度的微分控制方法。
(2)对影响采煤机滚筒截割高度的因素进行了分析,得出了滚筒高度与采煤机几何参数及传感参数之间的关系。
(3)提出了一种截割路径平整性控制方法,通过实时调节摇臂倾角,对由机身倾角变化引起的滚筒高度变化进行自动补偿,并对提出的方法进行了仿真实验研究。
(4)提出的方法能够实时修正滚筒的截割路径,使其保持在相对平缓的变化范围内,有利于实现支架有效支护,并保证设备推移的顺利进行,对于推进综采自动化的发展具有积极意义。
[1] 徐 刚.综采工作面配套技术研究[J].煤炭学报,2010,35 (11):1921-1924.
Xu Gang.Study on match technology for fully mechanized longwall coal mining face[J].Journal of China Coal Society,2010,35(11): 1921-1924.
[2] 孙继平,宋秋爽,王国法.高效综合机械化采煤成套装备技术[M].徐州:中国矿业大学出版社,2008:35-45.
[3] Wang Guofa,Ren Huaiwei.New development of sets equipment technologies for coal mine long-wall face in China[J].Journal of Coal Science&Engineering(China),2012,18(3):1-9.
[4] 张世洪.我国综采采煤机技术的创新研究[J].煤炭学报,2010, 35(11):1898-1902.
Zhang Shihong.Study on the innovation of fully mechanized coal shearer technology in China[J].Journal of China Coal Society, 2010,35(11):1898-1902.
[5] 权国通,谭 超,侯海潮,等.基于粒子群三次样条优化的采煤机截割路径规划[J].煤炭科学技术,2011,39(3):77-79.
Quan Guotong,Tan Chao,Hou Haichao,et al.Cutting path planning of coal shearer based on particle swarm triple spline optimization [J].Coal Science and Technology,2011,39(3):77-79.
[6] Hu Suiyan.Present situation and developing trend of coal mine automation and communication technology[J].Journal of Coal Science and Engineering(China),2008,14(3):489-491.
[7] 张俊梅,范 迅,赵雪松.采煤机自动调高控制系统研究[J].中国矿业大学学报,2002,31(4):415-418.
Zhang Junmei,Fan Xun,Zhao Xuesong.Automatic horizon control system of coal mining machine[J].Journal of China University of Mining&Technology,2002,31(4):415-418.
[8] 任 芳.基于多传感器数据融合技术的煤岩界面识别的理论与方法研究[D].太原:太原理工大学,2003.
[9] 梁义维.采煤机智能调高控制理论与技术[D].太原:太原理工大学,2005.
[10] 樊启高,李 威,王禹桥,等.一种采用灰色马尔科夫组合模型的采煤机记忆截割算法[J].中南大学学报(自然科学版), 2011,42(10):3054-3058.
Fan Qigao,Li Wei,Wang Yuqiao,et al.An algorithm of shearer memory cutting based on grey-Markovian model[J].Journal of Central South University(Science and Technology),2011,42 (10):3053-3058.
[11] 刘春生,荆 凯,杨 秋.采煤机滚筒截割记忆程控的灰关联度计算新方法[J].煤炭学报2006,31(5):666-669.
Liu Chunsheng,Jing Kai,Yang Qiu.A new grey correlation degree computation method of shearer drum by cutting memory program controlling[J].Jouranl of China Coal Society,2006,31(5):666-669.
[12] 刘春生,荆 凯,杨 秋.采煤机滚筒调高截割记忆程控的控制策略[J].辽宁工程技术大学学报,2007,26(5):751-753.
Liu Chunsheng,Jing Kai,Yang Qiu.Control strategy of sample intervals of cutting memory program controlling for shearer drum[J].Journal of Liaoning Technical University,2007,26(5):751-753.
[13] 刘春生,杨 秋,李春华.采煤机滚筒记忆程控截割的模糊控制系统仿真[J].煤炭学报,2008,33(7):822-825.
Liu Chunsheng,Yang Qiu,Li Chunhua.Simulation of shearer drum cutting with memory program controlling by fuzzy control[J].Journal of China Coal Society,2008,33(7):822-825.
[14] 徐志鹏,王忠宾,米金鹏.采煤机自适应记忆切割[J].重庆大学学报,2011,34(4):134-140.
Xu Zhipeng,Wang Zhongbin,Mi Jinpeng.Shearer self-adaptive memory cutting[J].Journal of Chongqing University,2011, 34(4):134-140.
[15] 徐志鹏.采煤机自适应截割关键技术研究[D].徐州:中国矿业大学,2011.
Xu Zhipeng.Study on the key technologies of self-adaptive cutting for shearer[D].Xuzhou:China University of Mining and Technology,2011.
[16] 伍永平,员东风,张淼丰.大倾角煤层综采基本问题研究[J].煤炭学报,2000,25(5):465-468.
Wu Yongping,Yuan Dongfeng,Zhang Miaofeng.Study on the elementary problems of full mechanized coal mining in greater pitching seam[J].Journal of China Coal Society,2000,25(5):465-468.
[17] 李晓豁,李烨键,刘述明,等.基于预测控制的采煤机滚筒自动调高系统[J].计算机系统应用,2012,21(4):36-40.
LiXiaohuo,Li Yejian,Liu Shuming,et al.Automatic adjusting height system of shearer drum based on predictive control[J].Computer System Application,2012,21(4):36-40.
[18] 石建军,施皓宇,包寿胜,等.大倾角综采工作面液压支架参数设计及其与围岩关系[J].煤炭学报,2012,37(2):313-318.Shi Jianjun,Shi Haoyu,Bao Shousheng,et al.The hydraulic support parameter design in lean coal seam and numerical simulation about the relation hydraulic support and surround rock[J].Journal of China Coal Society,2012,37(2):313-318.
[19] 王忠宾,徐志鹏,董晓军.基于人工免疫和记忆截割的采煤机滚筒自适应调高[J].煤炭学报,2009,34(10):1405-1409.
Wang Zhongbin,Xu Zhipeng,Dong Xiaojun.Self-adaptive adjustment height of the drum in the shearer based on artificial immune and memory cutting[J].Journal of China Coal Society,2009, 34(10):1405-1409.
[20] 苏秀平,李 威,樊启高.采煤机滚筒调高滑模变结构控制策略[J].煤炭学报,2012,37(12):2107-2111.
Su Xiuping,Li Wei,Fan Qigao.A shearer drum height adjusting strategy using sliding-mode variable structure control[J].Journal of China Coal Society,2012,37(12):2107-2111.
A smoothness controlling method for the cutting path of the shearer based on the double-coordinators
ZHOU Xin,WANG Zhong-bin,TAN Chao,LIU Xin-hua,JI Rui
(School of Mechatronic Engineering,China University of Mining and Technology,Xuzhou 221116,China)
Aiming at the problem that the shearer cutting path was not smooth on the fully mechanized face,a smoothness controlling method based on double-coordinators was proposed.The main factors which affect the smoothness of the shearer cutting path were analyzed and the control model for the shearer drum height under double-coordinators was established.Moreover,a control algorithm for rocker inclination based on differential theory was designed in order to satisfy the continuous controlling requirement of the drum height.Finally,sample data from an experiment were provided as system input and the proposed method was simulated.The simulation results show that the largest gaps of the front drum height and the rear drum height reduced by 93.3%and 97.6%respectively compared with the gaps without the application of the smoothness controlling method.Accordingly,the standard deviation reduced by 95.6%and 97.2%.Thus,the smoothness of shearer cutting path can be improved effectively and the proposed method has important significance to promoting the development of fully mechanized automation.
shearer;cutting path;double-coordinators;smoothness;differential controlling
TD421.6;TP273
A
0253-9993(2014)03-0574-06
周 信,王忠宾,谭 超,等.基于双坐标系的采煤机截割路径平整性控制方法[J].煤炭学报,2014,39(3):574-579.
10.13225/j.cnki.jccs.2013.0429
Zhou Xin,Wang Zhongbin,Tan Chao,et al.A smoothness controlling method for the cutting path of the shearer based on the double-coordinators[J].Journal of China Coal Society,2014,39(3):574-579.doi:10.13225/j.cnki.jccs.2013.0429
2013-04-07 责任编辑:许书阁
国家高技术研究发展计划(863)重点资助项目(2013AA06A411);国家自然科学基金资助项目(51005231);江苏省青蓝工程资助项目
周 信(1987—),男,江苏扬州人,博士研究生。Tel:0516-83690758,E-mail:cumtzhouxin@gmail.com
猜你喜欢
防爆电机(2022年1期)2022-02-16
新疆钢铁(2021年1期)2021-10-14
幼儿教育·父母孩子版(2021年6期)2021-08-05
煤矿机电(2020年5期)2020-11-02
幼儿教育·教育教学版(2019年9期)2019-02-02
绿色科技(2018年20期)2018-12-19
环球市场信息导报(2017年4期)2017-05-18
环球人文地理·评论版(2016年9期)2017-03-15
印刷技术·数字印艺(2016年8期)2016-05-14
城市建设理论研究(2014年25期)2014-09-24