
气体管道路径自动寻优*
2014-05-29 16:41李晓平
化工机械 2014年1期
周 军 宫 敬 李晓平
(中国石油大学油气管道输送安全国家工程实验室)
近十年间,虽然全球经济低迷,但为满足人们的能源需求,全球的油气管道设计与建设仍然持续增长,2013年全球计划和在建管道有188 108km, 2011~2015年间计划与建设管道中75%为气体管道[1]。气体管道施工首先需确定管道路径,对于管道工程师已经是一项经常性和长期性的工作,并已做了大量尝试,传统上是在打印的地图上采用人工方式或优化理论进行求解,早在1971年Shamir U采用动态规划的方法确定手工网格上的管道最优路径[2],2004年Hilde M和Joakim H、2012年 Marcoulaki E C等分别针对海底管道路径和地面管道路径优化问题,建立了考虑管道投资最少的数学优化模型,并采用模拟退火算法求解[3,4]。
路径选择需考虑管道的设计、建造、运行及维护等多种情况,如:管道的安全性、水力和热力条件、环境保护、历史遗迹、土木工程与水文条件以及建造要求等,目前基于智能算法的路径寻优,虽具有较好的全局性,但在考虑多因素和复杂环境约束条件下,目标函数的构建因人而异,且约束往往难于处理,此外,对于大规模网格下的路径优化问题,智能优化算法求解速度较慢,比如随着网格数目的增加,遗传算法中的染色体长度变长,计算时间显著增加[5]。笔者采用一种综合性的路径寻优算法,可简单、快速地确定管道路径。
油气管道路径规划问题的处理主要包括:油气产出、物性;管道起/终点,管道进/出口压力;管道通过的区域,区域高程,土地类型(岩石地,沙土等);森林覆盖区、水源、河流、道路及铁路等不可穿越区;管道建设的材料、人工等费用,管径管材;地区法规;建设技术、建设目标(一般的投资费用最省);其他影响管道建设的因素。笔者重点考虑环境因素,包括平面、起伏地形(高程),不可穿越区以及不同的地表类型(岩石、河流、湿地等)等,采用数字化的地形数据,确定最优路径。
1 地形数据
路径寻优是在数字地图上进行的,连续的表用离散的数据替代,离散数据是连续地面起伏的近似表示,离散数据地图的分辨率越高,与真实地形越接近,优化的路径结果越准确,但是存在一个最高分辨率的限制,该格式与GIS(Geographic Information System)的栅格数据一致,具有良好的兼容性,称之为数字地图,取样地形如图1所示。
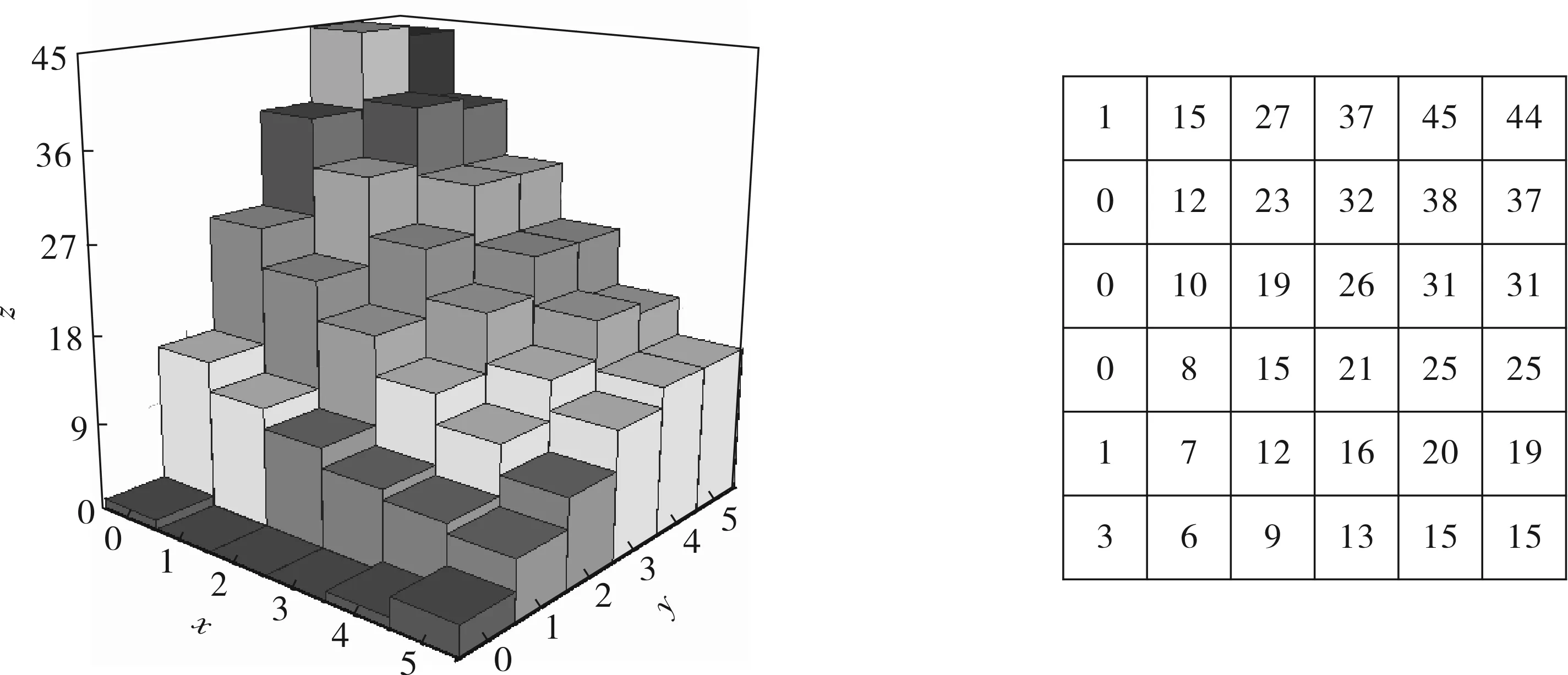
图1 取样地形(近似表示真实地形)
2 算法
最早、最著名的处理最短路径问题的算法是Dijkstra算法,该方法从起点开始逐步搜索并评估大量节点,计算并累加各节点的费用直至终点。由于此算法的搜索方向没有限制,对于大规模问题,计算时间很长。A*算法改进了Dijkstra算法,应用启发式的方式,在搜索过程中指导前进方向,减少了需评估节点的数量,降低了计算时间[6]。
2.1 邻接节点
从起点到终点选择一条路径,必须明确沿线节点搜索的选择方式,即从起点到终点确定最优路径中需评估的候选节点。在现实世界里人们决策时可向任意方向迈出一步,但是在数字地图上需要定义节点的邻接节点,一般包括3种方式:4邻接节点、8邻接节点和16邻接节点,图2中正中间的圆点定义为当前节点,其余各圆点为当前节点的邻接节点。
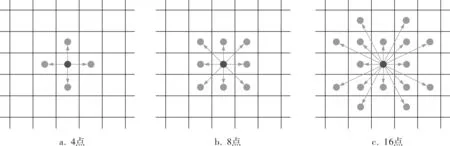
图2 邻接节点方式
2.2 费用与启发式函数
路径寻优的目的是确定费用最少的路径,这里的费用不仅是投资费用,它是更广义的费用,一般包括距离、投资、上升段长度以及管道积液量等。为了减少搜索区域,A*算法使用启发函数来指导搜索方向,比如搜索得到如图2b中正中间的圆点为当前节点,与此点邻接的有16个节点可作为下一个节点。对于这16个节点来说,总费用函数表示为:
f=g+h
(1)
式中f——起点到终点路径的总费用;
g——起点到当前节点的邻接节点实际累积费用,对于起点g=0,邻接节点的费用g等于起点到当前节点费用gc加上当前节点与邻接节点间的费用gn;
h——邻接节点到终点的评估费用,通常的评估函数包括曼哈顿距离函数、对角线距离函数和欧几里德距离函数3种[7],笔者采用对角线距离函数。
算法(图3)通过评估邻接16个节点的总费用,取总费用最小的节点作为搜索的最优节点。该算法的主要部分包括OPENLIST和CLOSELIST两个列表,OPENLIST中容纳未访问的节点,CLOSELIST容纳已访问的节点,算法从OPENLIST取点加入CLOSELIST中直至找到终点。
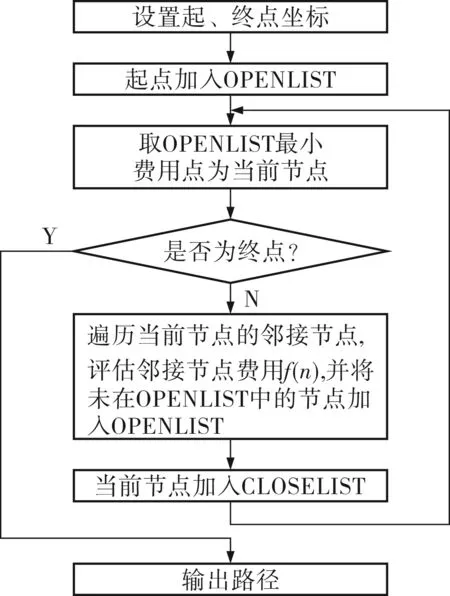
图3 程序框图
3 结果分析
使用地形模型函数生成数字地图,地形模型函数为:
(2)
地形模型函数的参数取值见表1。
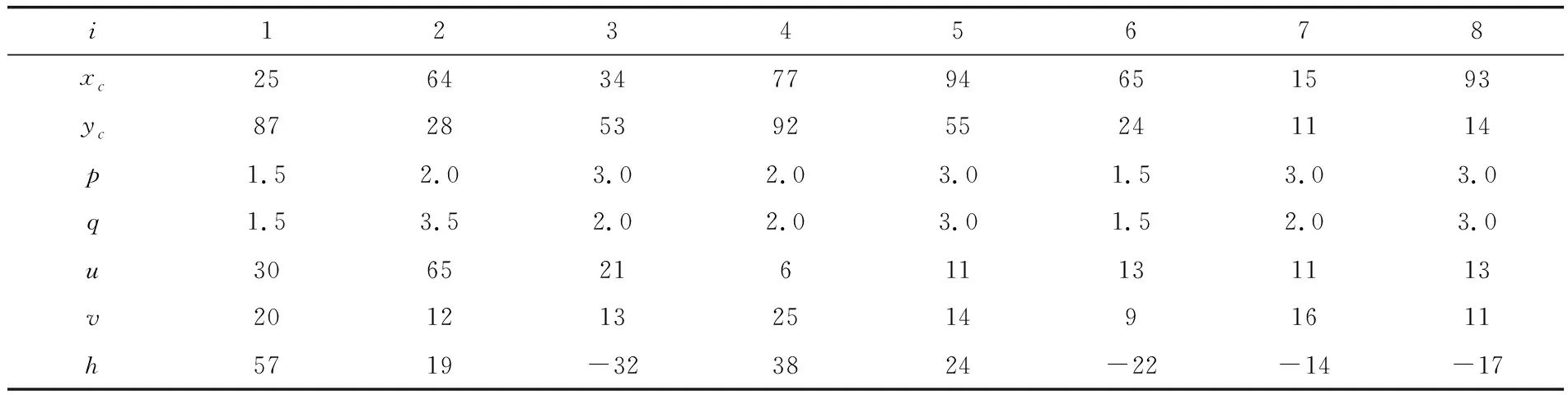
表1 地形模型函数的参数值
在此部分将介绍在模拟的栅格数据上不同条件下的路径规划,示例的数字地图如图4所示,网格数为20×20。
3.1 地形起伏下的最短路径

对于气体单相管流,管线压力损失主要来源于摩擦阻力,起伏地形下的最短路径即管道的最优路径,无需考虑水力约束。采用路径寻优程序可自动确定如图5所示起伏地形下的最短路径,从图5中还可以看出直线绕过低洼地区。

图5 起伏地形下的最短路径
3.2 避开障碍区的最短路径
如果在管道通过地区存在村庄、名胜古迹等不可通过区,管道需绕行,当此障碍信息输入计算程序后,可自动确定最优避障路径,如图6所示。
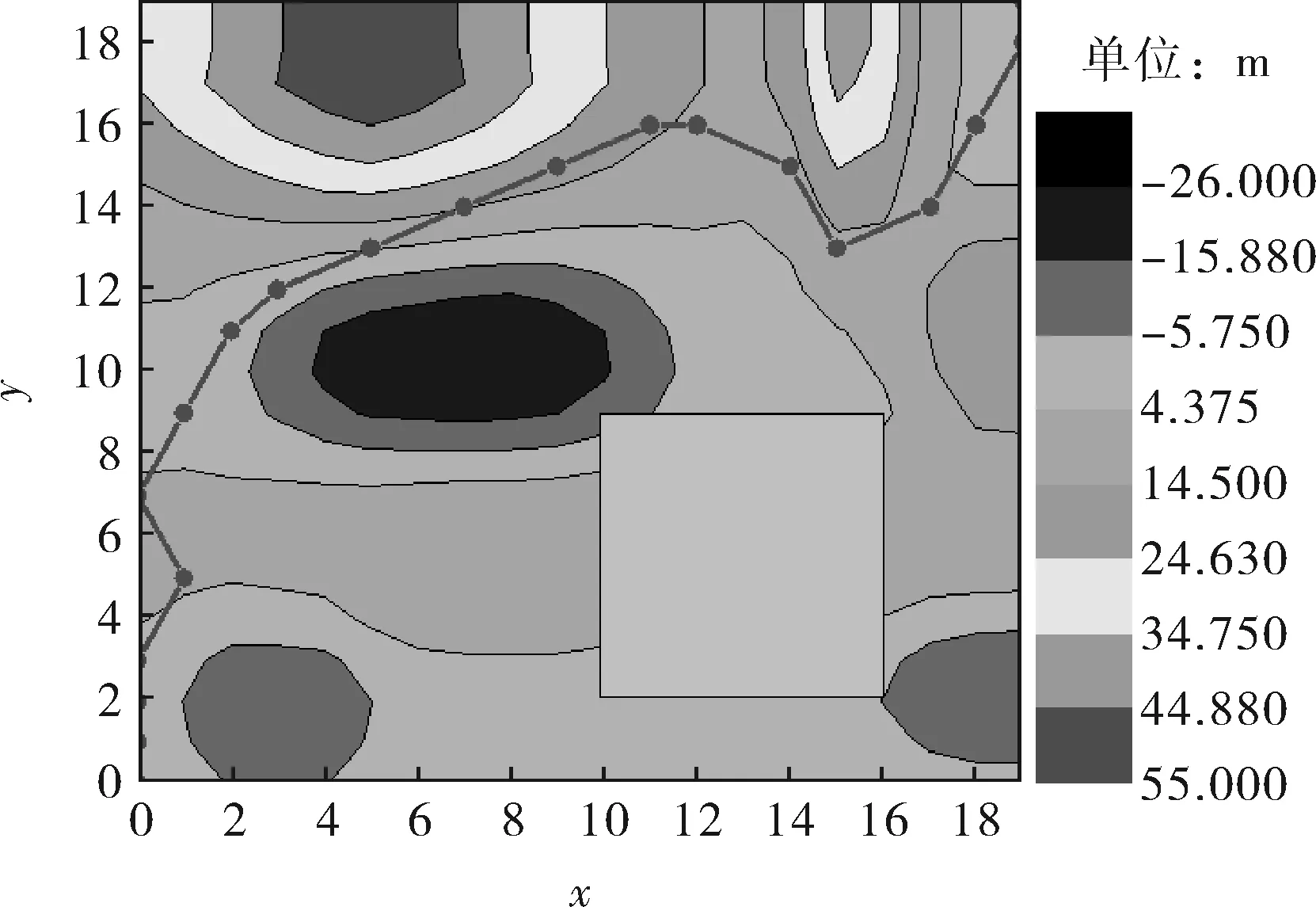
图6 避开障碍区的最短路径
3.3 地面类型
在管道铺设区域包括岩石、草地、沙土及河流等,称为不同的地面类型,管道经过这些地区时费用会有很大的差异,比如管道穿越河流时单位长度的费用远高于其他区域类型时的费用,该问题可描述为不同的区域类型下当前节点与邻接节点的费用gn不同。
笔者以含河流区域的管线最优路径为例,设非河流区域gn=Dn,河流区域gn=αDn,α为费用系数(根据管线穿越河流的具体情况而定)。
为了更好地说明此问题,另采用平面下不同类型图(图7)。图中深色为河流区域,白色为非河流区,设置20×20网格,网格大小1×1,设起点A(16,2),终点B(16,17),α=4。若管线采用直线穿越(虚线AB),费用f=23.000,采用文中所示算法算得AB间路径的费用f=20.935,降低8.98%,穿越河流的费用系数越大,降低比例越大。同理,设置另一起点C(0,8)和终点D(19,19),优化路径如图7所示,明显可看出,路径CD在河流最窄处进行穿越,可降低管线穿越费用。对于起伏地形和其他因素条件下的不同地面类型地图,该方法也可兼容。
对于复杂条件下的河流穿越问题,穿越河流有多种方式(开挖方式、气举沉管法、顶管和定向钻机穿越),不同方式所用费用不同,管线穿越最终位置的确定应综合考虑水流、岸坡等因素,且应满足计算管线设计载荷[8]。该设计方法为工程设计人员提供了可供参考的路线设计方案。

图7 不同地面区域类型下的路径
4 结束语
笔者考虑各类环境因素,包括平面,起伏地形,不可穿越区,不同的地表类型(岩石、河流、湿地)等因素,使用数字化的地形数据,采用A*算法可自动确定气体管道最优路径。文中提到的管道路径设计框架,可根据工程实际费用进行扩充,为工程设计人员提供参考方案。油气管道路径寻优,管道管流包括单相和多相管道,多相管流不同于单相管流,对于一个起、终点高程相等的管线,如果是单相管流,上坡段损失的压力将在重力作用下在下坡段重新获得,因此管线压力损失来源于管道摩擦损耗,其仅是管道长度的函数而无需考虑沿线高程;在多相管流中,管线压降与沿线高程紧密相关,上坡与下坡段都是耗能过程,上坡段的能量损耗无法由下坡段重力补充,因此相同的起、终点位置和管线长度,不同的路径,沿线地形起伏不同管线具有不同的水力学特性。笔者只讨论了气体管道,重点论述多种环境因素的综合性路径优化方法,对于多相流管段具有兼容性。对于多相流管道,路径设计除考虑笔者提到因素,还需重视管道的水力特性,将路径寻优与水力条件结合。
[1] Tubb R.Pipeline & Gas Journal’s 2013 International Pipeline Construction Report[R]. Pipeline Gas Journal,2013.
[2] Shamir U.Optimal Route for Pipelines in Two-phase Flow[J].Society of Petroleum Engineers Journal,1971,11(3):215~222.
[3] Hilde M,Joakim H,Gudmund O.Optimization of Pipeline Routes[C].The Fourteenth International Offshore and Polar Engineering Conference,France:2004: 50~55.
[4] Marcoulaki E C,Papazoglou L A,Pixopoulou N.Integrated Framework for the Design of Pipeline Systems Using Stochastic Optimisation and GIS Tools[J].Chemical Engineering Research and Design,2012,90(12):2209~2222.
[5] 杨大地,冉戎.基于遗传算法的曲面最短路径求解[J].计算机仿真,2006,23(8):168~169.
[6] Russell S,Norvig P.Artificial Intelligence: A Modern Approach[M].English:Prentice Hall,1995:97~101.
[7] Wichmann D R.Automated Route Finding on Digital Terrain[D].New Zealand:University of Auckland,2004.
[8] 王桂龙,黄红毅,陈遥,等.燃气管道穿越河流工程的设计[J].煤气与热力,2002,22(3):266~268.
猜你喜欢
小太阳画报(2019年4期)2019-06-11
中国外汇(2019年21期)2019-05-21
山东冶金(2019年2期)2019-05-11
散文诗(2018年20期)2018-05-06
中国公路(2017年16期)2017-10-14
电子制作(2017年10期)2017-04-18
电子制作(2017年9期)2017-04-17
少儿科学周刊·少年版(2015年11期)2015-12-17
中国卫生(2015年11期)2015-11-10
中国卫生(2015年5期)2015-11-08
