
基于微型磁芯感应传感器的道路交通流量调查系统研究
2014-05-21 03:59童亮
仪表技术与传感器 2014年3期
童 亮
(北京信息科技大学机电工程学院,北京 100081)
0 引言
我国各种道路的发展已经由大规模的建设期进入到管理、控制和优化阶段。包括交通流量、车型、车速、车道占有率以及车流密度等参数的道路交通流信息是实现交通优化和智能交通管理的主要依据[1]。通过实时准确的道路车辆交通流信息,不仅可以完全了解和掌握当前的路况信息,而且可以利用智能控制和预测等手段,进行有效的交通控制和交通诱导,确保道路交通的畅通和现有道路的最佳利用率。
根据所采用传感器的不同,道路交通流调主要分为感应线圈检测、超声波检测、微波检测、红外线检测、视频检测等几种形式[2]。感应线圈是交通流调中应用最为广泛的方式之一,可以获得车辆出现、经过、计数及车道占有率等基本交通流信息[3-4]。其突出优点是技术比较成熟、车辆计数精确,但存在的主要不足是安装过程中对路面破坏大,需要中断交通,影响道路寿命,使用过程中容易被重型车辆、路面修理等损坏,同时存在车型识别率低的问题。对于基于超声波、微波、红外线和视频等手段进行的交通流调系统,就检测原理而言,具有一定的先进性和可实现性,但存在诸如系统安装条件要求高、受环境条件影响大、成本较高和可靠性较低等问题,在实际应用中受到限制。
文中提出的道路交通流调系统,采用微型磁芯感应传感器,该传感器体积小,安装简单。由于传感器的特殊设计,信号输出强,车型特征明显。与传统的感应线圈工作原理不同,不需要高频激波,经电路处理后输出为电压值,处理电路简单,抗干扰能力强。对不同车型由于底盘结构、高度等因素的差异所产生的车型特征信号曲线进行RBF神经网络学习后,完成车型的识别工作。同时,根据系统工作的特点,结合ARM嵌入式系统及3G网络配置,实现道路实时交通数据向控制中心的无线传输,为中心了解和控制交通提供依据。经过实际测试和验证,系统满足设计要求。
1 传感器的结构和工作原理
不同于传统的感应线圈式检测器,微型磁芯感应传感器由绕向相同的两个串联线圈和特殊设计的磁芯组成,其基本结构如图1。
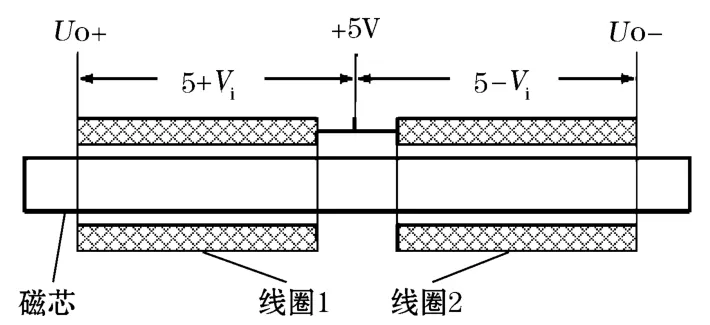
图1 微型磁芯感应传感器结构
该传感器工作原理比较简单,是一种基于法拉第电磁感应定律的车辆传感器[5]。根据法拉第电磁感应定理:

式中:Vi为线圈中的感应电压;Φ为线圈中的磁通量,

式中:N为线圈匝数;Ac为线圈的横截面积;H为磁场强度;μc为磁芯的相对磁导率。
对于固定结构的传感器来说,磁通量的变化只和磁场强度有关。
应用时,传感器垂直埋在路面下,在两个串联线圈的中间给定一个恒定的激磁电压,系统采用的是5 V电压.在电磁环境不发生变化时,通过两个线圈的磁场强度和磁通量固定,因此两个输出端均为系统5 V电压。当有导磁材料如金属车辆通过时,由于磁路发生变化,导致线圈中的磁场强度发生变化引起磁通量的改变,在线圈中产生感应电压,由于线圈绕向相同,相当于中间的5 V电压端子,两输出端的感应电压极性相反。传感器产生感应电压的大小除与通过车辆的速度有关外,其连续波形形状特征主要与通过传感器的车辆的车身和底盘结构有关,通过检测车辆经过时传感器的输出波形,就可以确定车辆的基本类型。因此采用该传感器的检测系统不仅可以检测车辆的存在,而且可以确定车辆的结构类型。
磁芯线圈是在空心线圈的中心插上磁芯棒构成。由于传感器结构微小,要产生足够大的感应电压,磁芯材料的选择至关重要,要求磁芯材料具有高磁导率、低矫顽力、高磁饱和强度等特性。感应线圈传感器采用的磁芯材料通常有铁氧体、坡莫合金和无定形材料3种基本类型。结合各种类型的特点,传感器采用无定形含有稀土材料形式的磁芯结构。
传感器的磁芯相对磁导率很高,使磁芯感应线圈的电压灵敏度比空心感应线圈要提高μc倍,考虑到退磁系数的影响,实际相对磁导率的值μc由式(3)求得:

式中:Nd为退磁系数,是由磁芯形状决定的。
对于圆柱体磁芯,Nd可以由Stoner简化式(4)计算得到:

式中:d为线圈直径;l为线圈长度。
在确定最终磁芯相对磁导率μc的基础上,通过理论计算和实验验证,确定传感器半线圈的长度为25 mm,线圈直径为2.3 mm,其输出满足系统检测的要求。
2 系统硬件设计
为实现系统信号采集、处理和结果传输,设计系统硬件包括传感器、信号处理电路、信号采集电路及采用ARM的嵌入式计算机处理系统,同时该系统作为路网控制的一个终端,采用3G技术与管理中心进行通讯,将路况流调结果实时回传给路网控制中心。系统硬件组成如图2。

图2 系统硬件组成
其中信号处理电路是硬件设计的重点部分。根据传感器及其输出信号的特点,信号处理具体实现电路如图3,主要由滤波、调零、减法、积分、调幅和放大等部分组成。图3(a)电路为基本滤波、调零和减法电路。电路中设计的几组RC电路实现低通滤波的功能,通过调零电位器进行无信号时输出调零作用,两个三极管对传感器两端信号采取差分输入,高精密运算放大器对差分信号进行减法运算并进行一定的信号放大,在消除5 V系统激磁电压的同时,为后续电路提供初步放大的传感器输出信号;图3(b)为积分电路。通过该电路对输入信号进行积分,增加信号的强度,同时反应车辆不同部分经过传感器时的信号的变化趋势;图3(c)为幅值调整电路。整个电路的输出幅值控制在5 V之内,在对不同车型进行实验的基础上,通过调节该放大电路的放大倍数来选择合适的输出幅值,同时在该电路中增加电压跟随器与后续电路进行阻抗匹配;图3(d)为末级放大电路,对前级输入的信号进行进一步的放大,电路设计中配置了保护电路和具有限幅功能的电路。
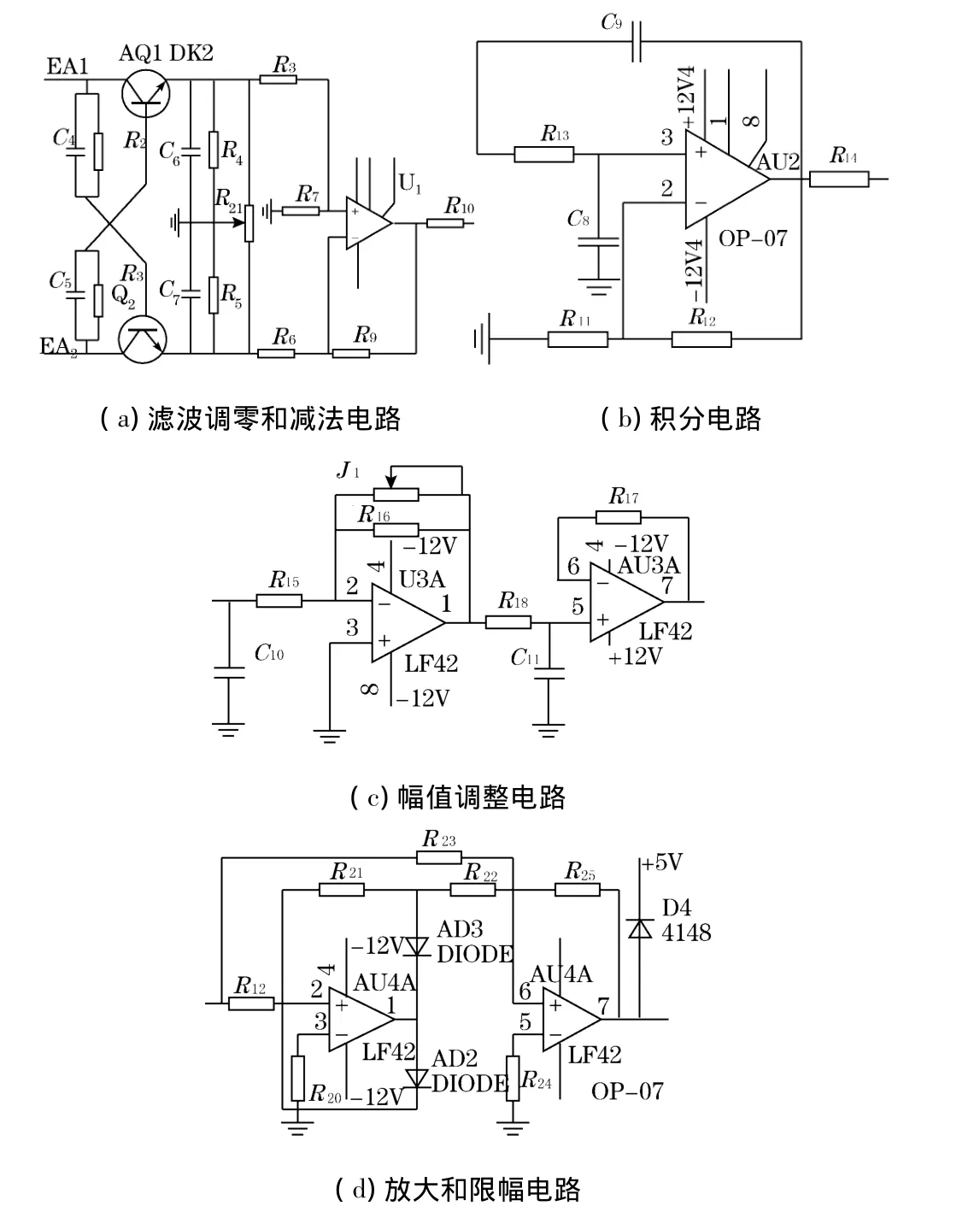
图3 信号处理电路原理图
经过处理的传感器输入信号,通过数据采集卡进入ARM系统进行数据处理和车型识别等算法,包括流量、车型、车速等信息的处理结果应用3G网络发送到交通控制中心。
3 车型识别方法及结果
3.1 系统输出波形分析

图4 实测波形图
图4为不同车型通过传感器时实际测量获得的波形。包括二轴货车、六轴货车、马六轿车以及大客车的输出波形,每种车辆给出2个速度波形。可以看出,对同一种车辆来说,不同速度通过传感器时,其输出波形的形状高度相似,只是因为速度变化,其波形宽度发生变化,波形幅值也因磁通量变化的快慢有一定的差别。但对不同车型来说,波形的形状差别比较明显,这也是通过RBF神经网络进行车型识别的主要特征。
实际应用当中,为了获得车辆的速度和长度,需要安装两个一定距离间隔的传感器,这样可以得到同一根车轴通过两个传感器的时间间隔,结合传感器的距离计算得到车速,再根据整车通过单根传感器所需的时间即可以求得车长的信息。图5为马六轿车以44 km/h的速度通过两个传感器的信号波形,该波形进行了数字滤波处理,信号具有明显的起点和终点特征,根据该特征可以获得车辆通过一个传感器时的全车波形。

图5 马六轿车44 km/h输出波形
3.2 RBF 神经网络
根据检测器输出波形特征进行基于模式识别的车型识别系统,有模糊算法[6]、BP 神经网络[7]、小波分析处理[8]等方法,每种算法都有自己的优缺点和适应范围。由于市场车型不断增加,检测器所得到的特征波形也千变万化,采用模糊算法的系统,在比较全面确定模糊规则方面就存在问题;BP神经网络理论上可以获得模型最优匹配的功能,但前提是样本的穷尽性要达到要求;小波分析处理等现代信号处理手段可以实现相同的功能,但存在的问题是算法的复杂性导致系统实时性存在问题。在分析比较的基础上,系统采用径向基函数RBF神经网络作为车型识别算法,该算法不仅可以实现离线训练,而且能够在线学习和完善,算法也比较简单,速度也快,克服了以上算法存在的一些不足。
RBF神经网络是一种采用局部感受域来执行函数映射的人工神经网络,是一种单隐层前馈神经网络,具有最优逼近和全局逼近的特性[9],其拓扑结构如图6所示。

式中:X=[x1,x1,…,xn]T为网络输入向量;k 是隐层节点(即感受野)数;φi(X)是感受野i的Gauss核函数;‖·‖表示欧氏泛数;Ci=[ci,1,ci,2…ci,n]T为感受野的数据中心;σi为第 i个非线性变换单元的宽度;ωij是第i个隐层节点与第j个输出节点之间的权值。
RBF网输出是感受野核函数输出的线性加权,为
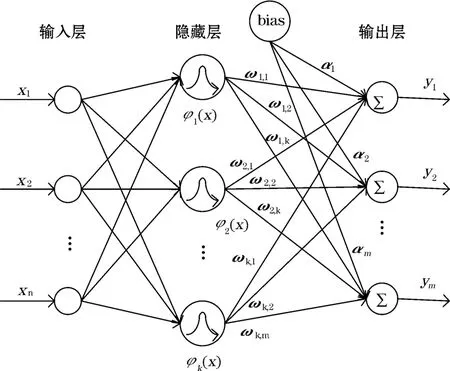
图6 RBF神经网络拓扑结构

只要确定了各数据中心和宽度,即可通过解线性方程得到输出权。因此,RBF网设计的主要任务是确定其数据中心和宽度。
RBF神经网络学习有随机算法、自组织学习算法和最近邻聚类学习算法等几种形式,目的是用于选取RBF中心。随机算法、自组织学习算法主要用于静态模式的离线学习,不仅需要获得所有可能的样本,而且需要事先确定中心个数,结合系统的实际需求,这两种方法不适合在系统中使用。文中采用动态自适应RBF神经网络模型[10],该模型是基于最近邻聚类学习算法,是一种自适应聚类学习算法,不需要事先确定隐含层单元的个数,完成聚类所得到的RBF网络是最优的,并且可以进行在线学习,这样就保证在车型多变、不能事先采集所有车型样本的情况下,通过实际道路上样本采集与在线学习获得最优RBF网络的能力。
3.3 学习方法及结果分析
根据系统输出的波形,反映车型特征应该包括幅值、脉宽、极大极小点等参数,但在分析过程中发现,对于相同类型的车辆,如同是小型客车或同轴数的载货汽车,这些特征值都会有差异,只是在波形的整体形状上具有相似性。结合这一特点,在选取车辆波形特征参数上采取区域归一化面积的方法,即对一辆车的全车波形曲线与横坐标时间轴围成的区域沿时间轴等间隔划分,计算每一部分的面积,然后进行归一化处理,作为RBF的输入。这样的划分方法,不受车辆速度的影响,只要划分的足够细,就能准确反映波形的形状特征。
网络训练选择了小型客车、二轴到六轴共7种车型进行了训练,输入为每种车型的等分归一化面积,输出为相应车型对应值为1,核函数为高斯函数,训练方法采用自适应近邻聚类算法。经过25个周期的训练,形成具有28个隐层的网络,精度为0.01。同时用7类29辆车对训练结果进行了验证,训练结果比较如图7。从比较结果可知,网络对实际车型的识别率很高,超过95%。根据交通部公路交通情况调查的要求及检测路段实际交通流成分的特点将车型分为型客车、大型客车、小型货车、中型货车、大型货车、摩托车等几种形式,结合车长的信息,就可以对这些车型进行准确分类。
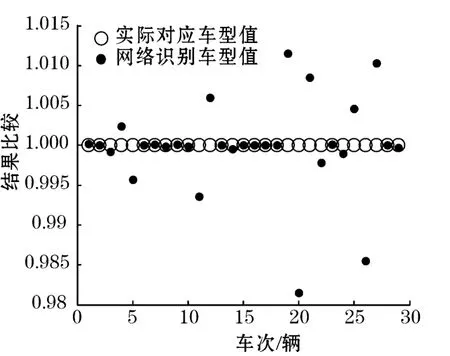
图7 实际车型与网络计算结果比较
4 结论
微型磁芯感应线圈的工作原理不同于传统环形感应线圈式车辆检测器,具有体积小、安装简单、对道路破坏面小的特点。通过对传感器磁芯和线圈的特殊设计,传感器输出信号强,信号处理电路不需要加载激振电路,信号处理电路简单。采用该传感器设计的道路交通流调系统,检测器输出的信号波形特征明显,利于采用模式识别的方式进行车型的辨识,系统通过采用RBF神经网络对不同车型进行训练和识别,结果准确,识别率高。同时系统在硬件设计中采用ARM嵌入式处理系统和3G无线网络传输系统,可以将实时采集和处理后的交通流调信息发送到交通控制中心,进行实时路况监测和道路交通管理。
[1]王力,王川久.智能交通系统中实时交通信息采集处理的新方法.系统工程,2005,23(2):86 -89.
[2]彭春华,刘建业.车辆检测传感器综述.传感器与微系统,2007,26(6):4-11.
[3]林凌,韩晓斌.微型感应线圈车辆传感器.传感技术学报,2006,19(4):68-72.
[4]林培群,徐建闽.感应线圈信号曲线的处理方法及其在车型识别中的应用.公路交通科技,2009,126(12):108 -119.
[5]巨汉基,朱万华,方广有.磁芯感应线圈传感器综述.地球物理学进展,2010,25(5):1870 -1876.
[6]刘玉铭,白明.一种基于模糊模式识别方法的车型识别仪.公路交通科技,2000,17(1):63 -65.
[7]钟汉如,梁俊斌.BP网络在车型分类中的应用.自动化技术与应用,2003,22(8):65 -74.
[8]林培群,徐建闽.感应线圈信号曲线的处理方法及其在车型识别中的应用.公路交通科技,2009,126(12):108 -119.
[9]何平,潘国峰,赵红东,等.基于RBF网络的智能气敏传感器温度补偿.仪表技术与传感器,2008(7):6 -8,42.
[10]孙延风,梁艳春,孟庆福.改进的神经网络最近邻聚类学习算法及其应用.吉林大学学报(信息科学版),2002,20(1):63-66.
猜你喜欢
材料研究与应用(2022年4期)2022-09-01
大电机技术(2022年4期)2022-08-30
清远职业技术学院学报(2022年1期)2022-01-24
舰船电子工程(2021年12期)2022-01-06
装备制造技术(2020年12期)2020-05-22
模具制造(2019年7期)2019-09-25
中国农村水利水电(2019年1期)2019-01-21
雷达学报(2018年5期)2018-12-05
系统工程与电子技术(2016年7期)2016-08-21
通信电源技术(2016年3期)2016-03-26
