
基于PLC的全功率风力发电实验平台
2014-05-17 01:34廖胜超朱凌云孙培德
实验室研究与探索 2014年3期
廖胜超, 朱凌云, 孙培德
(东华大学信息科学与技术学院,上海 201620)
0 引言
风电设备投入使用之前都是经过了好几年测试的,而我国很多风机推入市场之前还没来得及进行测试,隐患肯定存在。要研究风力发电控制技术需要大量的试验研究,最准确的实验方法当然是将风电机组置于风电场,做真实的风电实验。但是,考虑到下述原因,真实的风电实验很难实施:①风速条件无法人为控制。某些风电实验需要偶发的特殊风速条件,长时间等待实验条件必然耽误科研进度;②风速、风向随机波动,且不易精确测量,影响风电实验的数据分析;③单台实验风机的安装维护成本很高,特别是大型风电机组的研究;④对于不成熟的控制实验存在安全隐患。上述因素使得大部分风电研究,特别是风电控制研究很难进行现场实验验证,因此,大多数实验室无法具备风场环境或者风电机组实验条件,这不利于一些新颖的理论和技术的研究。为了加快风力发电技术的发展,加强风力发电技术的研发能力,必须进行风力发电模拟技术研究,建设风力发电实验的模拟平台[1]。
目前,国内很多机构与高校都已经建设了大、小功率的风力发电模拟平台,同时也进行了风力发电技术的仿真研究。除使用原动机作为风力机风轮模拟部分以外,其他电气结构部分基本与真实风力发电机相同[2]。
本文使用异步电动机作为原动机,异步电机作为风力发电机,四象限变频器连接异步电机和电网,四象限变频器连接电机的一侧使用磁通矢量控制给定发电机转速,原动机的控制方式为闭环转矩控制。使用四象限变频器大大减小了系统的复杂性,同时也是未来技术的发展方向。软件上使用一个固定风速情境下的转矩和转速模型,实现手动追踪最大功率点,即通过手动调节异步风力发电机的转速来调整回馈的功率达到峰值,验证方法为观察实际工作点沿着理想曲线运动,最终效果理想稳定。
1 系统原理及硬件设计
本系统采用异步电机变频拖动单元来宽范围模拟风力发电机运行转速,用户可根据需要调节拖动单元转速来达到模拟风速变化引起的发电机转速变化。通过开放式主控系统,用户可以根据自己的实验需求给定发电机转矩,通过变流系统控制异步发电机的功率输出,达到变速恒频风力机组的并网或离网发电等过程各参数的实验研究。
系统分为拖动单元、控制单元、发电单元、测速单元,原理图如图1所示。
(1)拖动单元。由一台二象限变频器ATV71及其控制的4 kW异步电动机(风力机)组成,功能是模拟系统因风速变化而引起的转速转矩变化。
(2)控制单元。由施耐德Modicon M340可编程控制器(PLC)、触摸屏XBTGT2330和PC机组成,功能主要是分析系统状态,控制系统运行,实现数据模拟。
(3)发电单元。由ABB的四象限变频器ACS800及其控制的3 kW全功率异步发电机组成,功能是实现风机并网或离网发电过程。
(4)测速单元。速度编码器,其提供的连接轴上的实际转速传递给ATV71,再通过CANopen总线传递给PLC。
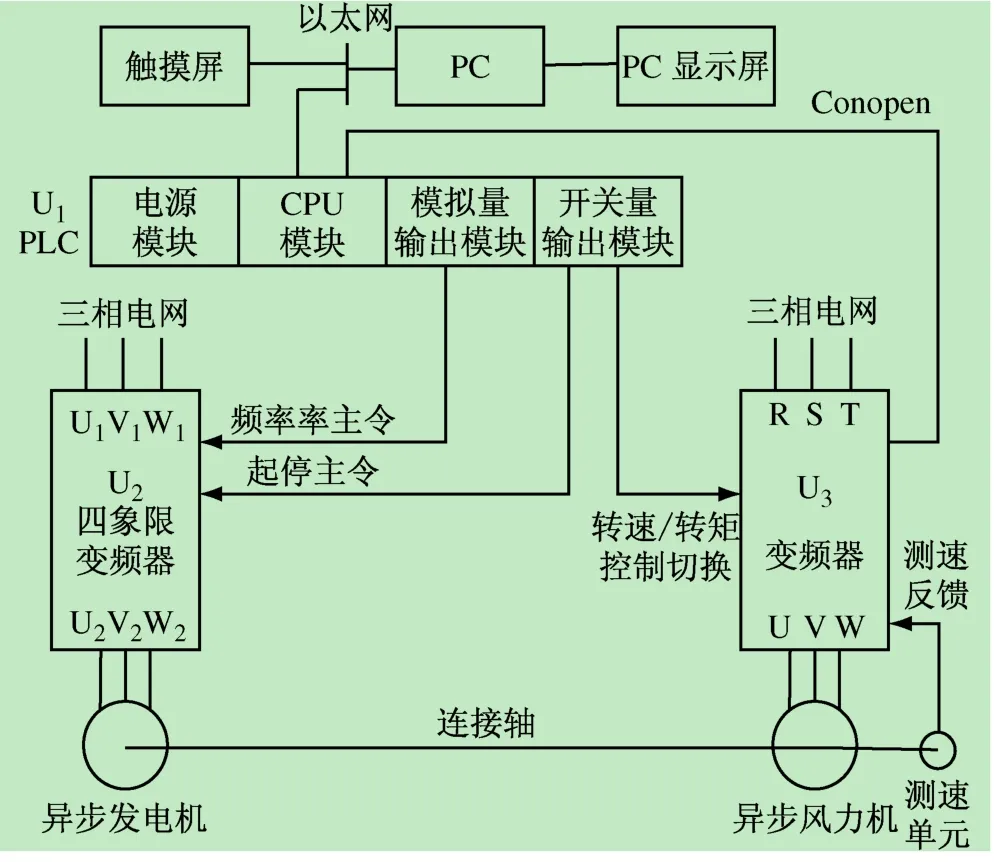
图1 系统硬件原理图
图1中,触摸屏相当于操作面板,控制风力机和异步发电机的启动、停止以及转速给定;触摸屏与PC通过以太网相联,触摸屏与PLC挂在同一个以太网交换机上;触摸屏通过和PC通信,实现其上的程序下载和调试;触摸屏通过和PLC通信,相互交换各自程序需要的数据。PC机主要的作用是编程调试,并且利用组态软件实现数据的监视作用,其与PLC的通信方式为以太网。PLC中的电源模块提供整个控制系统中24 V DC的供电;CPU模块的以太网和CANopen接口接受外部各种输入和输出信号,CANopen通信接口和ATV71变频器(U3)连接,PLC的模拟输出模块给定四象限变频器(U2)频率,开关量输出模块给定四象限变频器控制异步发电机的起停信号。U2连接三相电网和异步发电机,机侧使用磁通矢量控制来控制连接轴的转速。变频器U3控制风力机的启停的信号和速度大小由PLC的Canopen总线给定,其转速/转矩控制切换由PLC开关量输出模块给定。两电机的调速范围从0~1 500 r/min,通过一个连接轴相连接。连接轴上的速度由速度编码器测得后给U3,然后由U3将速度值提供给PLC。
近年来,变频器的电网侧采用PWM整流和逆变技术,使得变频器的电网、电机侧都可以实现能量的双向流动,即实现变频器的四象限运行[4]。当电机处于回馈制动状态时,其中再生的能量经逆变器中开关元件和续流二极管向中间滤波电容充电,使中间电流电压升高,此时电网侧变换器中的开关元件在PWM的控制下将能量馈入到电网。同时,由于PWM整流器电流闭环控制作用,使电网电流与电压同频同相位,提高了系统的功率因数,消除了网侧谐波污染。
系统的基本运行过程:打开所有设备电源,使U3工作在速度控制模式,通过触摸屏和PLC给出U2和U3的给定转速,然后点击触摸屏上启动电机按钮,使两电机提速到指定转速,这时稳定运行的轴上的转矩几乎为0。通过触摸屏和PLC使U3工作在转矩控制模式,转矩给定由PLC根据风机特性和当前电机转速实时计算获得。为使模拟风力机的电机达到设定的转速,U3自动调整输出频率和电压,使得连接轴的转速大于发电机的同步转速,发电机工作在回馈制动状态。风力机的发电功率回馈给四象限变频器U2,并输送到电网,可以通过四象限变频器U2的面板观测到回馈功率的值。调节U2的输出频率(即发电机的同步转速),风力机的转速和转矩随之根据风机特性而改变。
2 系统软件设计
图2描述了系统软件的总流程,包括PLC中UnityPro软件的梯形图结合ST语言的编程、触摸屏中Vijeo Designer的编程和上位机中的 Vijeo Citect的cicode编程。
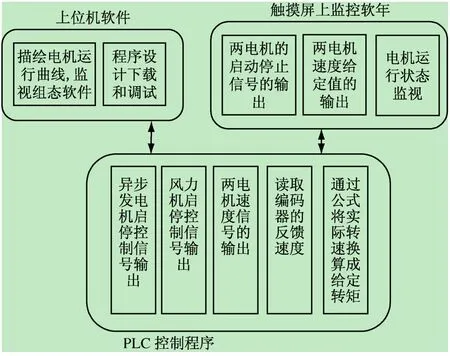
图2 系统软件流程图
(1)触摸屏的UI界面。启动按钮用于同时启动2个电机,并保持同一速度,当到达想要调速的大致区间后,开启风力机的转矩控制,使得回馈制动的功率始终保持在稳定的值,关于风力机的模型和其控制策略在后续的研究可以继续调整。
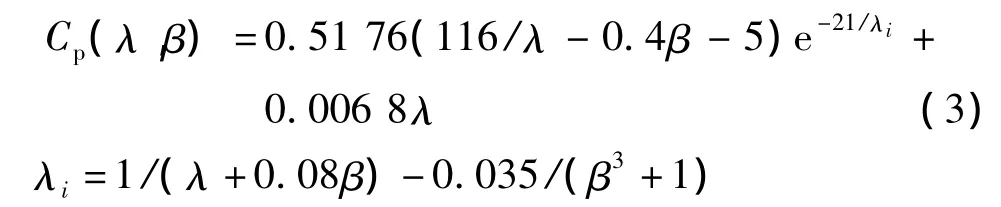
(2)风力机特性的模拟。根据贝兹理论,风机实际得到的功率与风速的3次方有关。在风速ν下运行时,单位时间内捕获的风能为

式中:ρ为空气密度;R为风轮叶片半径;Cp为风能利用系数,反映了风机利用风能的效率;Cp是叶尖速比λ和浆距角β的函数,

ωT为风轮旋转机械角速度,
本系统初步设定了一个固定的风力模型用于验证系统基本运行效果,本文模拟的风力机速度转矩模型:

式中:T*为轴承上的转矩,即转矩给定/额定转矩Tm;n为轴的转速,实验中,n变化0~750 r/min。
在转矩正常情况下,稳态时换算得到的风力机的功率为

风力机期望的转矩-转速和功率-转速特性曲线以及实时运行工作点如图3所示。实验表明,调整四象限变频器电机侧的频率和电压,工作点便沿着风机的特性曲线变动,表明系统工作符合期望,可以承担后续研究任务。适当调整工作点,可使风机处于最大功率点。
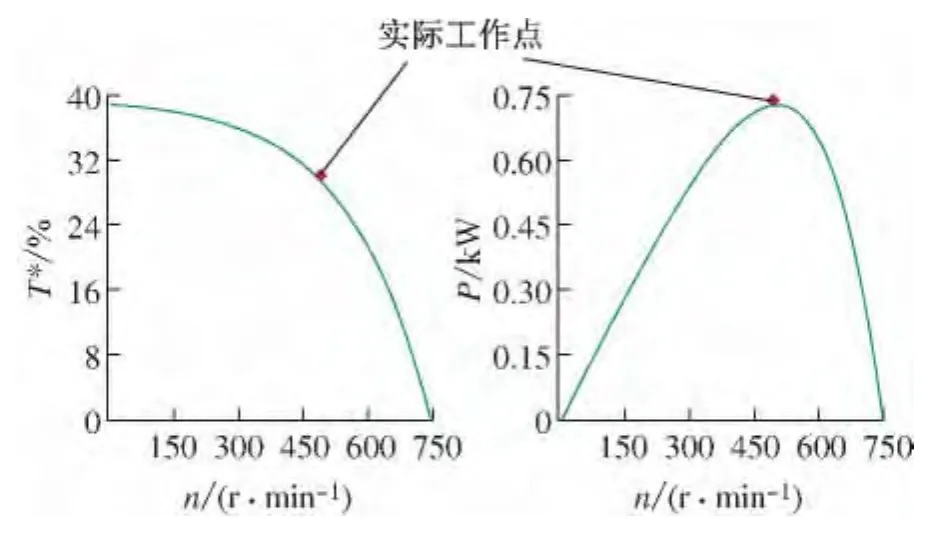
图3 上位机监视界面
3 结语
通过调速观察回馈的功率,符合理想的规律,最大功率点在500 r/min左右,四象限变频器面板显示回馈的功率在24%左右,即回馈功率在0.72 kW左右。由于一定的技术原因,还未能实现四象限变频器和PLC的总线通信,四象限变频器实际回馈给电网的功率数值只能通过变频器的面板读取,不能够将所有有用的数据统一传递给主控系统进行统一管理分析。
由于本文的工作重点在于全功率异步风力发电机实验平台的建立,后续研究可以通过改变速度转矩换算的公式,模拟实际情况下风速的变化,进行各种控制算法性能的探索。平台目前为止还只能实现手动寻找最大功率点,后续还可以进行编程实现自动追踪最大功率点的实验。
[1]吴盛军.风力发电机组模拟实验平台的设计与实现[D].南京:南京理工大学,2013.
[2]刘吉斯.基于异步电机的风力发电模拟品太研究[D].秦皇岛:燕山大学,2012.
[3]孟 明,靖 言,李和明.风电多元化应用及其相关技术[J].电极与控制应用,2011,38(3):1-11.
MENG Ming,Jing Yan,LI He-ming.Pluralized application of wind power and its technology development[J].Electric Machines &Control Application[J].2011,38(3):1-11.
[4]孟 悦.风电轴承试验台监测及数据采集系统研究[D].大连:大连海事大学,2011.
[5]陈毅东,杨育林,王立乔,等.风力发电最大功率点跟踪技术及仿真[J].高电压技术,2010,36(5):1322-1326.
CHEN Yi-dong,YANG Yu-ling,WANG Li-qiao,et al.Maximum power Point tracking technology and simulation analysis for wind power generation[J].High Voltage Engineering,2010,36(5):1322-1326.
[6]杨中仓,金葆文.四象限变频器在水泵中的应用及与DCS系统通讯[J].电脑知识与技术,2011,7(23):5779-5790.
YANG Zhong-cang,JIN Bao-wen.Four-quadrant frequency converter in the pump in the application and communicate with the DCS system[J].Computer Knowledge and Technology,2011,7(23):5779-5790.
[7]康忠健,辛士郎,仲崇山,等.双馈风电场穿透功率增加对电力系统稳定影响综述[J].电力自动化设备,2011,31(11):94-99.
KANG Zhong-jian,XIN Shi-lang,ZHONG Chong-shan,et al.Impact of ride-through power increase of DFIG-based wind farm on power system stability[J].Electrical Power Automation Equipment,2011,31(11):94-99.
[8]王 斌,吴 焱,丁 宏,等.风电主控系统和变频系统的一种半物理试验方案[J].电力自动化设备,2011,31(10):117-120.
WANG bing,WU Yan,DING hong,et al.Semi-physical test of wind turbine master control system and inverter system[J].Electrical Power Automation Equipment,2011,31(10):117-120.
[9]朱 飞,洪荣晶,陈 捷,等.基于PLC的风电回转支承实验台控制系统设计[J].机械设计与制造,2011(4):188-190.
ZHU Fei,HONG Rong-jing,CHEN Jie,et al.Design of testing table control system used for wind power slewing bearing based on PLC[J].Machinery Design & Manufacture,2011(4):188-190.
[10]陈 宁,于继来.基于电气剖分信息的风电系统有功调度与控制[J].中国电机工程学报,2008,28(16):51-57.
CHEN Ning,YU Ji-lai.Active power dispatch and regulation of wind power system based on electrical dissecting information of electric power network[J].Proceedings of the CSEE,2008,28(16):51-57.
[11]邓文浪,陈智勇,段 斌.提高双馈式风电系统故障穿越能力的控制策略[J].电机与控制学报,2010,14(12):15-22.
DENG Wen-lan,CHEN Zhi-yong,DUAN Bin.Control strategy improved doubly——fed wind-power fault ride-through for generation system[J].Electric Machines and Control,2010,14(12):15-22.
[12]费 智,符 平.我国风电发展的态势分析与对策建议[J].科技进步与对策,2011,28(10):65-68.
FEI Zhi,Fu Pin.The Status quo and future policy of China’s wind power development[J].Science & Technology Progress and Policy,2011,28(10):65-68.
[13]李 丽,叶 林.基于改进持续法的短期风电功率预测[J].农业工程学报,2010,26(12):182-187.
LI Li,YE Lin.Short-term wind power forecasting based on an improved persistence approach[J].Transactions of the CSAE,2010,26(12):182-187.
[14]李俊芳,张步涵,谢光龙,等.基于灰色模型的风速一风电功率预测研究[J].电力系统保护与控制,2010,38(19):151-159.
LI Jun-fang,ZHANG,Bu-han,XIE Guang-long.Grey predictor models for wind speed-wind power prediction[J].Power System Protection and Control,2010,38(19):151-159.
[15]方江晓,周 晖,黄 梅.基于统计聚类分析的短期风电功率预测[J].电力系统保护与控制,2011,39(11):67-78.
FANG Jiang-xiao,ZHOU Hui,HUANG Mei.Short-term wind power prediction Based on statistical clustering analysis[J].Power System Protection and Control,2011,39(11):67-78.
[16]刘臣宾,夏彦辉,常东旭.基于GPRS的风电并网稳定控制系统[J].电力自动化设备,2010,30(7):104-108.
LIU Cheng-bin, XIA Yan-hui, CHANG Dong-xu. Wide-area protection and control system basedon GPRS[J].Electrical Power Automation Equipment,2010,30(7):104-108.
[17]石可重,杨 科,徐建中,等.基于非线性有限元法的风电叶片动态频率研究[J].太阳能学报,2011,32(3):318-322.
Shi Ke-zhong,Yang Ke,Xu Jiamhong,et al.Research on wind blade dynamic frequency with no-linear FEA[J].Acta Energiae Solaris Sinica,2011,32(3):318-322.
[18]谢 震.变速恒频双馈风力发电模拟平台的研究[D].合肥:合肥工业大学,2005.
猜你喜欢
现代食品科技(2022年8期)2022-09-02
中学生数理化·高一版(2022年3期)2022-04-05
初中生学习指导·提升版(2020年10期)2020-09-10
装备制造技术(2019年12期)2019-12-25
测控技术(2018年5期)2018-12-09
知识就是力量(2018年7期)2018-07-11
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
振动工程学报(2015年1期)2015-03-01
太阳能(2015年6期)2015-02-28
振动、测试与诊断(2014年5期)2014-03-01
