空间微重力下离轴三反相机离焦范围
2014-05-16 09:30郑玉权
中国光学 2014年2期
刘 磊,马 军,郑玉权
(1.长春理工大学机电工程学院,吉林长春130022;
2.中国科学院长春光学精密机械与物理研究所,吉林长春130033)
1 引言
离轴三反TMA光学系统由三块反射镜组成,其光路可折叠,结构紧凑;各反射面采用非球面表面后其系统传递函数接近衍射极限;具有视场大、空间分辨率高、无色差、平像场、及宽光谱等优势[1-3],因此该系统已经广泛应用于空间相机中。
空间相机所处的运载和运行环境条件(如冲击、振动、压力和温度等)非常复杂。为了在复杂的环境条件下保证相机的成像质量,要求相机在具备良好的动力学性能的同时还需要具有良好的微重力环境适应性能[4-6]。
空间相机光机结构一般由光学元件、支撑结构、调焦机构、扫描机构等部分组成。光学元件是空间相机完成对地成像任务的核心,通常由光学透镜或反射镜组成,实现对地面景物成像;支撑结构是用来固定和支撑各光学元件,承受来自力学环境及温度环境变化带来的冲击和扰动,确保镜头具有必要的成像精度。支撑结构可以是承力筒、夹层板、框架结构、板式构架,以及杆系结构等形式。
无论光学元件还是支撑结构,由于受到空间微重力环境的影响,相机在地面受到的重力载荷得到释放,使相机结构产生与地面重力加速度方向相反的位移,导致光学元件表面面型、曲率半径、镜间隔等参数产生变化。曲率半径、镜间隔的变化直接导致焦面产生离焦,即相机的CCD靶面偏离焦平面,最终降低光学系统传递函数、降低成像质量。因此,本文主要研究微重力对相机离焦的影响。
2 离焦理论分析
对于F#为9的光学系统,离焦量与光学传递函数关系如图1所示。当离焦量达到焦深位置0.1 mm时,离焦传函达到0.66,此时相机的成像质量大大降低。根据相机系统传递函数的分配,相机允许的离焦传函为0.97,其对应的离焦量仅为0.028 2 mm,因此,由于空间微重力产生的离焦量必须计算。
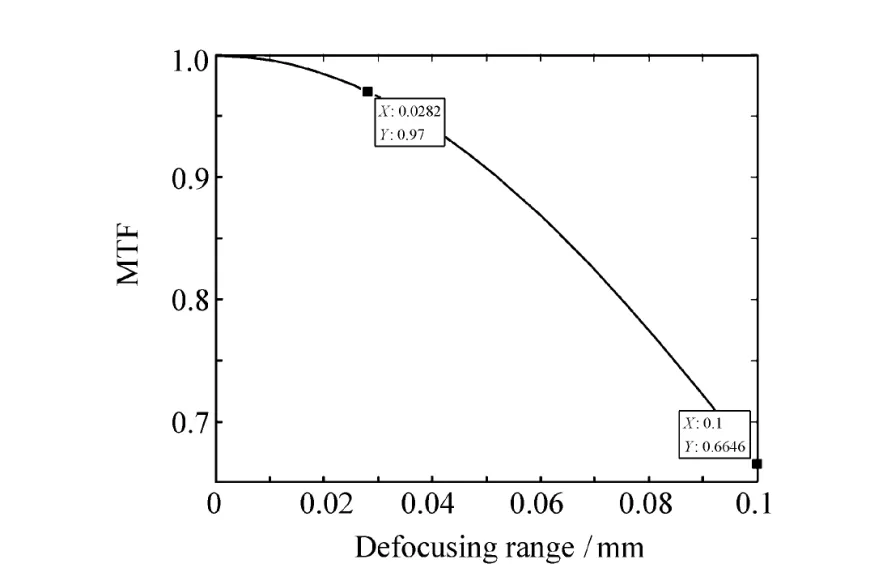
图1 离焦量与光学传递函数关系Fig.1 Relationship between defocusing range and optical transfer function
图2为TMA光学系统,r1、r2和r3分别为主、次镜、第三镜半径,s1为主镜与次镜间隔,s2为次镜与第三镜间隔,l'F为后截距。
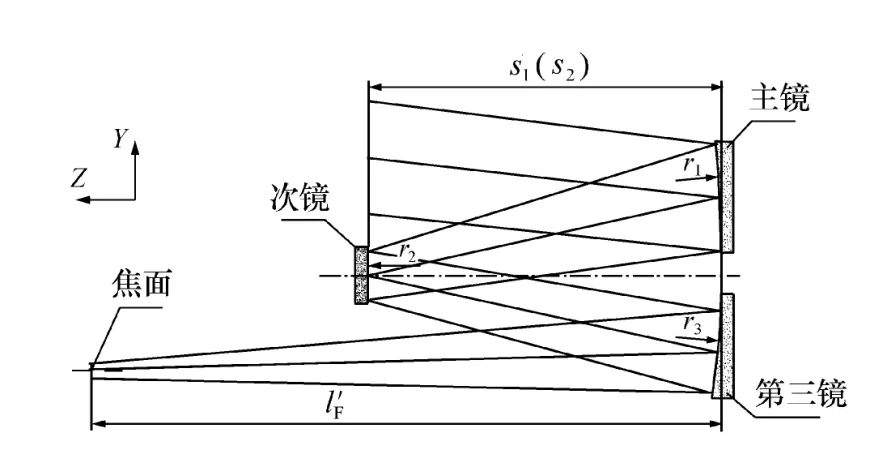
图2 离轴三反光学系统Fig.2 Configuration of off-axial TMA optical system
等效高斯光学系统矩阵[7-8]:



3 微重力下镜间隔计算方法
有限元法作为数值模拟计算的一种有效方法,可以解决工程中的结构分析问题。文中将使用有限元分析方法对反射镜面型进行详细的分析,在有限元仿真分析后,将反射镜镜面各节点的坐标通过一定的数据处理方法处理后,可以得到镜面的位置变化[9]。
光学元件的刚体位移包括在X、Y、Z方向的平移及绕X、Y、Z轴的旋转。
齐次坐标变换在图像处理中是一种较为常用的方法,通过它可以实现图像的旋转、缩放、平移。在这里通过齐次坐标变换来计算镜面刚体位移。
齐次坐标方法是用一个n+1维的分向量来表示一个n维向量。例如,在A坐标系中的点P直角坐标为(x,y,z),表示成齐次坐标为(x,y,z,1)。齐次坐标变换则是描述一个齐次坐标系到另为一个齐次坐标系的变换关系。
在相机的光机结构系统中,如果反射镜镜面受到载荷作用后,相对于各自初始位置沿x、y、z轴的平移量分别为e、f、g,绕x、y、z轴的转动量分别为 θx、θy、θz,通过齐次坐标变换,可求出位移后镜面有限元节点与初始状态下镜面节点间的坐标变换矩阵。虽然坐标变换矩阵时不同的顺序会出现不同形式的坐标变换矩阵,但考虑到 θx、θy、θz是微小的角度,在数值上作近似处理,让cosθ≈1,sinθ≈θ,并略去高阶小量,得到总的坐标变换矩阵形式统一,最终公式如下:
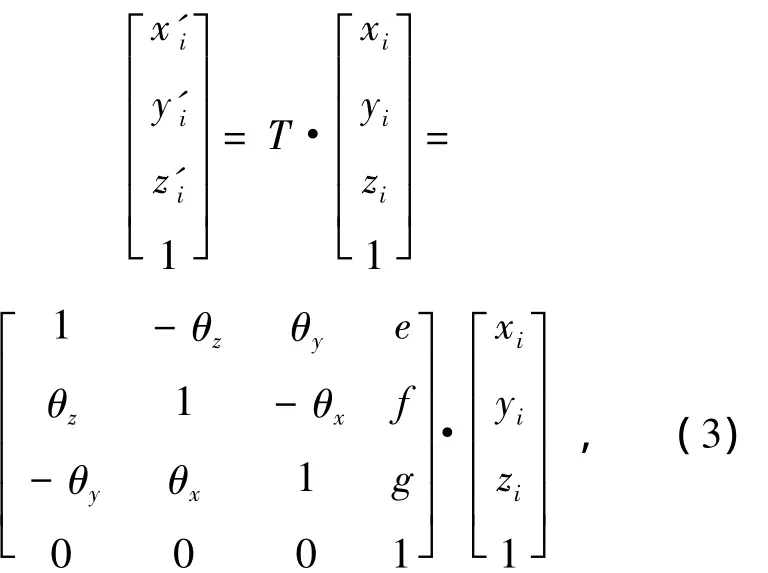
式中,(xi,yi,zi)为变形前镜面上的节点的坐标,(x'i,y'i,z'i)为变形后镜面上的节点的坐标。公式变换得:

利用最小二乘法求解Q的最小值,对所有未 知数求偏导,得到6个方程如下:

对方程组的求解就可以得到镜面在微重力作用下的刚体平移量和偏转量。把主镜与次镜的Z向平移量相减可以获得变化后的主镜与次镜间隔参数s1的变化量,同理,把第三镜与次镜的Z向平移量相减可以获得变化后的第三镜与次镜间隔参数s2变化量。
随机选取首都医科大学2013级临床和基础医学等专业60名学生作为研究对象,将60名学生分为10个小组,每组5~7人。
4 球面半径拟合计算方法
从有限元中得到变形后的反射镜镜面节点坐标后,需要采用最小二乘算法拟合出一个新球面,其方法是将待拟合的新球面参数作为待定系数,将每个采样数据和理想参数之间残留误差的平方和相加,平方和最小时所对应的待定系数就是拟合值[10]。
假设近似球面的球心为C(x0,y0,z0),半径为r,则该球面可以写成如下的标准形式(x-x0)2+(y-y0)2+(z-z0)2=r2,基于代数残差的目标函数l为:

进一步简化式(6),将分数形式改为非分数形式:
式(7)中的待定参数受B2+C2+D2-4AE=1公式约束。
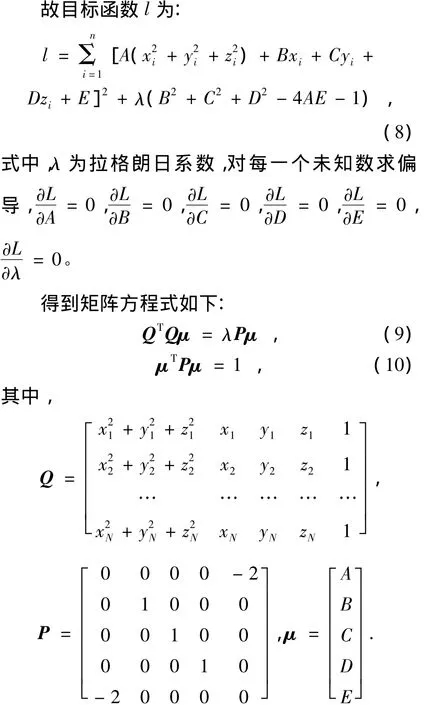
显然,λ和μ分别是广义特征值和广义特征向量。而镜面变形后的拟合球面半径为:

5 计算实例
相机在地面采用卧式装配,各反射镜镜面与重力方向平行。当相机入轨后,由于受到空间微重力载荷的影响,在地面上受到的载荷得到释放,各反射镜的间隔、半径发生变化,从而导致光学系统后截距发生变化,焦面产生离焦。
本文主要以有限元仿真分析方法完成相机的力学分析,采用MSC/Patran进行前处理,MSC/Nastran解算器求解。相机整机有限元模型(见图3)主要采用8节点HEX单元和4节点QUAD单元划分,共251 813个节点,150 787个单元。

图3 相机有限元模型Fig.3 Finite element model of camera
相机主框架采用铝基碳化硅复合材料,密度为2.8×103kg/m3,弹性模量为95 GPa,泊松比为0.28,线胀系数为 1.9×10-5。主镜、次镜、第三境均采用碳化硅材料,碳化硅材料的密度为3.05×103kg/m3,弹性模量为400 GPa,泊松比为0.16,线胀系数为2.5 ×10-6。
相机入轨后,重力载荷得到释放,可以用地面重力方向的反方向(+Y向)施加惯性载荷来模拟,对相机的连接座约束6自由度位移后,通过有限元计算得到主镜、次镜、第三镜反射镜镜面有限单元节点的位移结果带入球面半径拟合式(11)及镜面刚体位移式(5),计算得到各反射镜镜面刚体位移、曲率半径变化,结果见表1,主镜、次镜、第三镜在微重力载荷作用下位移图见图4。

表1 各镜面位移及半径变化Tab.1 Mirror displacement and radius change (mm)

图4 主镜、次镜、第三镜在微重力载荷作用下的位移Fig.4 Mirror displacement diagram in microgravity loading
把表中的刚体位移量、半径变化量修正后截距式(2)中各参数后,得到空间微重力环境下后截距为1 509.556 7 mm,减去相机在地面重力环境下后截距1 509.535 2 mm,得到相机离焦量0.021 mm,接近相机允许的离焦量0.028 5 mm。
为了验证该套计算方法的正确性,在实验室将相机翻转90°(见图5),使相机承受+Z向重力载荷作用,原先-Y方向的重力载荷得到释放。通过焦面调焦机构调整焦面位置[11],当焦面达到最佳位置时测得调焦量为0.04 mm,与+Z向施加重力载荷及+Y方向的重力载荷得到释放后相机离焦量0.039 mm的分析结果基本吻合。
6 结论
由3块反射镜组成的空间相机在轨道空间微重力的影响下,其反射镜面间隔、曲率半径往往发生改变。虽然其变化量在设计允许的范围之内,但对系统的后截距产生较大的影响,最终导致相机离焦,降低成像质量。通过对三反系统的等效高斯光学系统分析,得到其后截距公式;采用有限元分析方法得到反射镜镜面节点的位移值,通过齐次坐标变换,得到反射镜面刚体位移公式,求出镜间隔变化量Δs;通过采用最小二乘算法拟合计算得到微重力环境下的镜面半径r,利用文中推导出的三反光学系统后截距公式,计算出空间微重力环境下相机后截距,与重力环境下的后截距相减后得到相机在微重力环境下的离焦量,为相机调焦机构的设计提供了理论依据。

图5 相机立式检测Fig.5 Camera under vertical detection
[1] 常军,翁志成.宽覆盖、离轴空间相机光学系统的设计[J].光学 精密工程,2003,11(1):55-57.
CHANG J,WENG ZH CH.Design of optical system in wide cover,off-axial space camera[J].Opt.Precision Eng.,2003,11(1):55-57.(in Chinese)
[2] 赵文才.改进的离轴三反光学系统的设计[J].光学 精密工程,2011,19(12):2837-2843.
ZHAO W C.Design of improved off-axial TMA optical systems[J].Opt.Precision Eng.,2011,19(12):2837-2843.(in Chinese)
[3] JURANEK H J,SAND R,SCHWEIZER J,et al..Off axis telescope-the future generation of earth observation telescopes[J].SPIE,1998,3439:104-115.
[4] 张洪文.空间相机调焦技术的研究[D].长春:中国科学院长春光学精密机械与物理研究所,2003.
ZHANG H W.Research on the auto focusing technology for space camera[D].Changchun:Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,2003.(in Chinese)
[5] 丁亚林,田海英,王家骐.空间遥感相机调焦机构设计[J].光学 精密工程,2001,9(1):35-38.
DING Y L,TIAN H Y,WANG J Q.Design on the focusing mechanism of space remote-sensing camera[J].Opt.Precision Eng.,2001,9(1):35-38.(in Chinese)
[6] 邵明东,郭疆,孙继明.离轴三反测绘相机调焦机构的设计[J].中国光学,2012(4):373-379.
SHAO M D,GUO J,SUN J M.Design of focusing mechanism for off-axis TMA mapping cameras[J].Chinese Optics,2012(4):373-379.(in Chinese)
[7] 刘磊.空间三反相机调焦范围的确定[J].光学 精密工程,2013,3:631-636.
LIU L.Focusing range of space off-axial TMA optical camera[J].Opt.Precision Eng.,2013,3:631-636.(in Chinese)
[8] 迪特恩.现代几何光学[M].长沙:湖南大学出版社,2004.
DITTEON R.Modern Geometrical Optics[M].Changsha:Hunan University Press,2004.(in Chinese)
[9] 陈永聪.基于有限元法的大口径平行光管主反射镜支撑技术研究[D].西安:中国科学院西安光学精密机械研究所,2007.
CHEN Y C.Mounting technology of large mirror in collimator based on FEM[D].Xi'an:Xi'an Institute of Optics and Precision Mechanics,Chinese Academy of Sciences,2007.(in Chinese)
[10] 杨恒亮,屠大维,赵其杰.基于三坐标测量机的大口径球面拟合测量方法[J].工具技术,2007,41:12.
YANG H L,TU D W,ZHAO Q J.Large caliber spherical surface fitting method based on MMC[J].Instrument Technology,2007,41:12.(in Chinese)
[11] 刘磊,曹国华.大视场长焦面光学遥感器双凸轮式焦面调焦机构[J].光学 精密工程,2012,9:1939-1944.
LIU L,CAO G H.Double cam focusing mechanism of space camera with wide field and long-focal-plane[J].Opt.Precision Eng.,2012,9:1939-1944.(in Chinese)
猜你喜欢
新能源科技(2022年9期)2022-11-20
数学小灵通·3-4年级(2022年5期)2022-06-01
快乐语文(2021年34期)2022-01-18
环境技术(2020年1期)2020-03-06
VOGUE服饰与美容(2019年10期)2019-12-02
家用汽车(2016年4期)2016-02-28
中国光学(2015年1期)2015-06-06
空间控制技术与应用(2015年1期)2015-06-05
科技创新导报(2014年28期)2014-12-01
中国光学(2013年5期)2013-11-26