基于P87LPC768的大功率直流电机驱动控制电路
2014-05-15 08:10刘媛媛冯宏伟
机械工程与自动化 2014年3期
刘媛媛,冯宏伟
(1.无锡科技职业学院,江苏 无锡 214028;2.无锡祥生医疗影像有限公司,江苏 无锡 214028)
0 引言
直流电机具有调速平滑、调速范围广、过载能力强、可快频无级启制动和反转等特点,因此在工业控制领域中得到了广泛的应用[1-5]。为适应直流电机的使用需求,许多半导体厂商推出了直流电机控制专用集成电路。这种集成电路具有集成度高、外围电路简单、使用方便的优点;但也存在输出功率有限、大多不能满足大功率场合需求的缺点。本文在分析了大功率直流电机驱动电路设计中可能出现的问题的基础上,基于微处理器P87LPC768,结合场效应管驱动芯片IR2110、功率场效应管和光电隔离器设计了大功率直流电机驱动电路。
1 驱动控制硬件电路的整体结构
本文设计的电动驱动控制系统以微处理器P87LPC768为核心,单片机根据上位机通过串口传入工作参数,采用设计的控制算法计算出占空比,经PWM控制电路向MOSFET驱动电路发出控制信号,再由MOSFET驱动电路控制H桥电机驱动电路;经过H桥驱动电路对电机进行调速,为直流电机提供相应转矩。电动机工作时,通过采样电阻把检测到的电动机实际工作电流反馈到单片机,单片机再根据相应的控制算法一方面对驱动电机进行电流的PID闭环控制;另一方面用来监测电机电流,当采集的电机电流高于设定的保护值时,示警灯进行报警提示,同时控制继电器断开电机回路,实现对电机的过流保护。直流电机驱动控制系统的总体框图如图1所示。
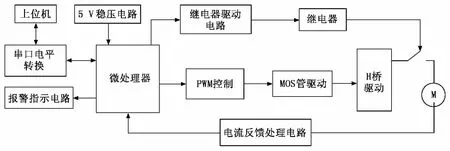
图1 直流电机驱动控制系统的总体结构框图
2 控制系统硬件电路设计
硬件电路是控制系统的平台,其各种功能的实现都要利用这个平台来执行。本文的硬件电路主要由处理器电路、串口电平转化电路、驱动控制电路、电流采样处理电路、继电器保护控制电路和报警指示电路等多部分构成。整个系统由24 V的蓄电池供电,经内部电源转换后供各部分电路使用。
2.1 微处理器选择
本系统选用Philips半导体公司推出的单片机P87LPC768,它兼容了MCS-51系列单片机的功能,增加8位A/D转换、I2C总线、四通道PWM及看门狗定时器等功能,具有良好的电磁兼容特性和低功耗特性。本控制系统主要用P87LPC768的一路PWM输出,经过反相器74 HC04处理后分出两路互补的PWM脉冲序列,实现双极性H桥驱动电路控制的同时,可完全避免H桥MOS管同臂导通的问题。
2.2 串口电平转换电路
本设计采用了专用芯片MAX3232进行转换以满足微处理器与上位机PC的通信。串口电平转换电路如图2所示。
2.3 功率驱动电路设计
电动机驱动控制电路主要由MOSFET驱动电路和H桥驱动电路组成。驱动控制电路根据主控芯片P87LPC768调整输出的PWM占空比改变电机电枢电流的大小和转动方向,从而达到设定的驱动需求。
本系统设计的H型双极性驱动控制电路中选用4个相同的N沟道MOSFET作为功率开关器件。选取MOSFET时,反向耐压取值为两倍以上的余量,工作电流留有2~4倍的余量,工作频率与实际频率相当。根据以上要求,选定MOS管型号为IRF3205,其最小漏极电压为VDS=55 V,最大漏极电流为ID=110 A。本文采用MOSFET专用栅极集成电路芯片IR2110设计了包含前置驱动电路及功率驱动电路的电动机控制电路,如图3所示。
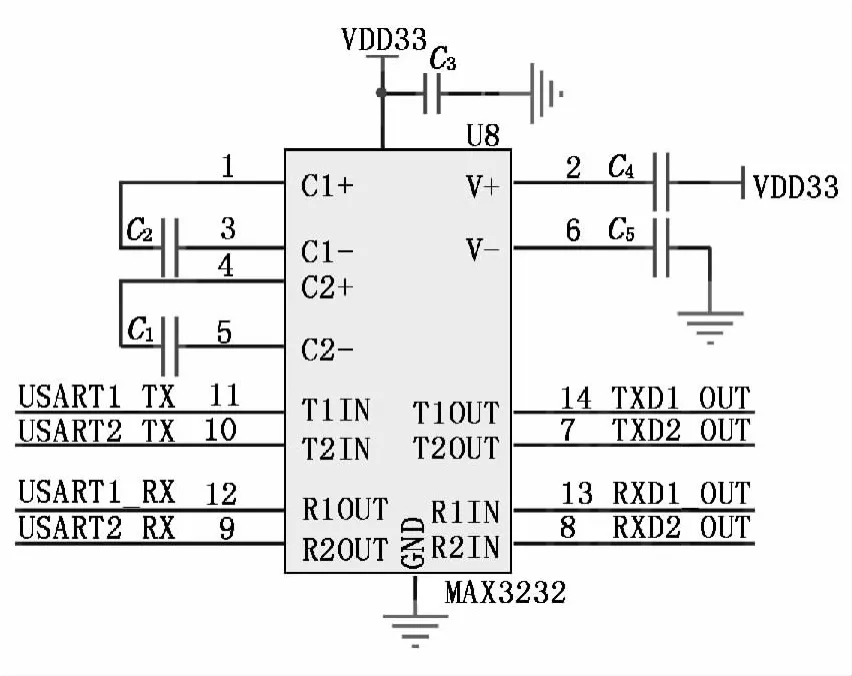
图2 串口电平转换电路
MOSFET前置驱动电路中IR2110芯片的两路输入信号HIN及LIN分别为驱动H桥中同桥臂上下两个MOSFET的驱动脉冲信号输入端,即接P87LPC768的两路PWM输出。由于两者有电气联系,所以输入级逻辑电源采用5 V电源,而输出级用于驱动MOSFET的驱动电压采用12 V电源。IR2110芯片输入级和输出级可以采用不同的电源,可以满足本系统的设计需要。
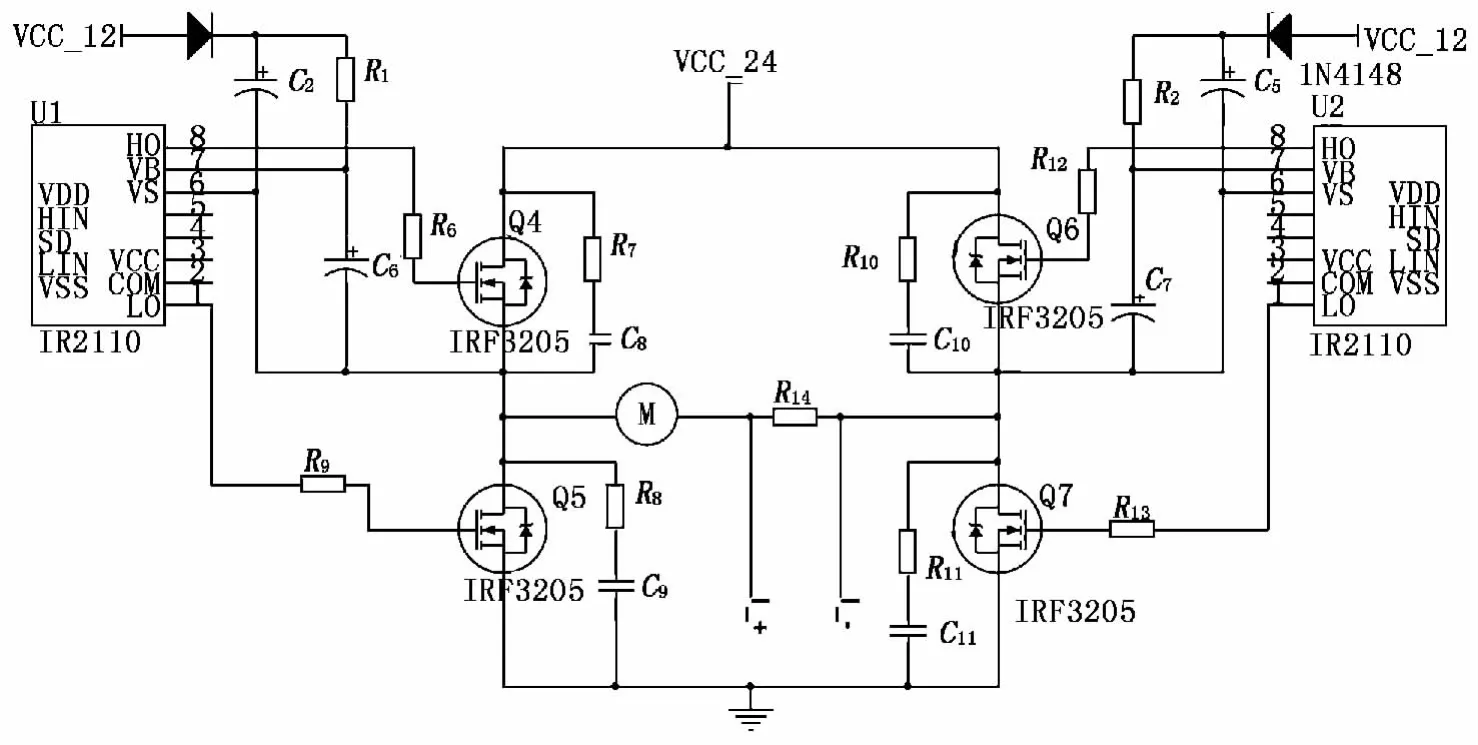
图3 MOSFET管驱动电路和H桥驱动电路
IR2110的输出级采用浮置电源,通过自举电路由固定的电源得来。图3中,C6,C7为自举电容。
由于IR2110内部的驱动阻抗很低,直接用它来驱动功率MOSFET器件会引起快速开关,有可能造成MOSFET漏源间电压的震荡,从而损坏MOSFET器件。故在IR2110的输出端和MOSFET的栅极之间分别串联了R6,R9,R12和R13四个无感电阻。
MOSFET栅源级间的阻抗很高,故漏源级间电压的突变会通过极间电容耦合到栅极而产生相当高的过冲电压Vgs,会引起栅源级间氧化层的永久性破坏,对于正方向的过冲电压,还会引起误导通。因此在栅源级间并接20 V的齐纳二极管加以保护,漏源级间的过压保护采用RC过电压抑制电路。
2.4 电流采样电路设计
本设计选用8 mΩ的锰铜采样电阻进行电流/电压转换,将控制电机0 A~25 A的电流信号对应转变为0 V~5 V的电压信号,作为电流反馈信号用于控制。
2.5 继电器保护控制电路和报警指示电路
继电器保护控制电路在本设计中主要用于在PWM控制系统发生异常时实现对电机控制回路通断的控制。
报警指示电路在本设计中的主要作用是在PWM控制系统出现异常时,由微处理器的GPIO口输出信号,通过光电耦合器TLP521驱动LED发光,发出报警指示以提醒用户。
3 控制系统的软件设计
3.1 控制主程序设计
电动机驱动控制系统的主程序流程如图4所示。
3.2 电流环PID控制软件设计
本程序采用增量式数字PID程序以PWM方式对直流电机进行调速。设Kp为比例常数,Ti为积分时间常数,Td为微分时间常数,T为采样周期。式(1)给出了增量式数字PID调节的数学表达式:
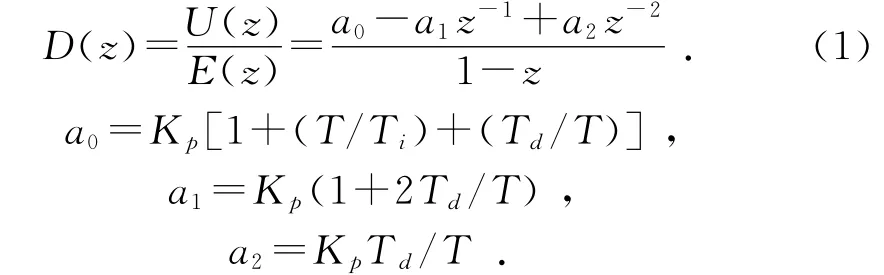
其中:D(z)为z变换后的传递函数;U(z)为PID后的输出z函数;E(z)为实际值与采样值的差值z函数。
软件实现PID算法的流程图如图5所示。
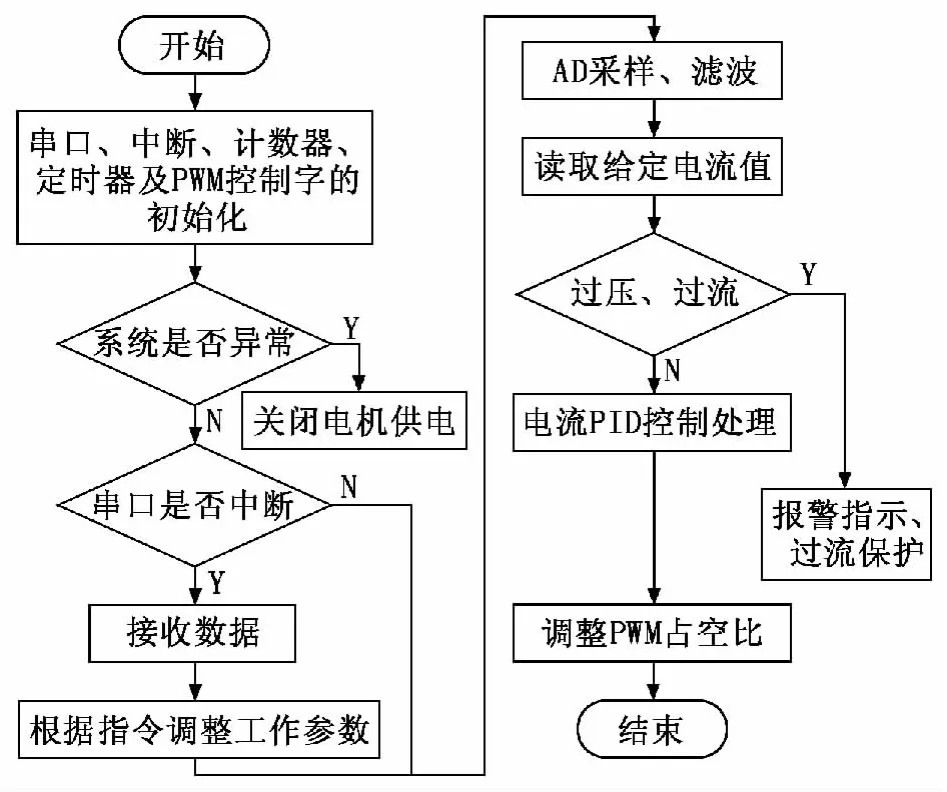
图4 电动机驱动控制系统的主程序流程图
4 实验结果分析
为了对驱动器性能进行测试,选用尤奈特24 V/300 W的直流电机进行闭环控制,额定转速为2 650 r/min,额定电压为24 V,额定电流为16 A。电机驱动控制电路上电,可使电机工作的最高转速达2 730 r/min,电机启动的最低转速为35 r/min,堵转时无明显发热现象。为了测试电路工作的稳定性,连续5 d电机工作8 h以上,电机工作未发现异常,电路的发热在设计允许范围内;为了测试电路的抗干扰和抗冲击能力,驱动控制电路在开与关之间连续进行1 000次左右的切换,电路没有出现任何故障;另外驱动控制电路在突然增加负载的情况下也能工作正常。从测试情况看,基本满足大功率直流电机的驱动要求。
5 结论
本文设计并实现了一种大功率直流电机驱动控制系统。在突然增加负载的情况下进行测试也能正常工作,完全满足大功率电机驱动的需要,而且设计过程中,为防止启/制动电流的骤然升高,电路有较大的电流冗余,电路中最高电流可以达到25 A,有效地保证了电路工作的稳定性并具有结构简单、驱动功率大、抗干扰能力强、功耗小、成本低、实用性广等优点,具有广泛的应用前景。
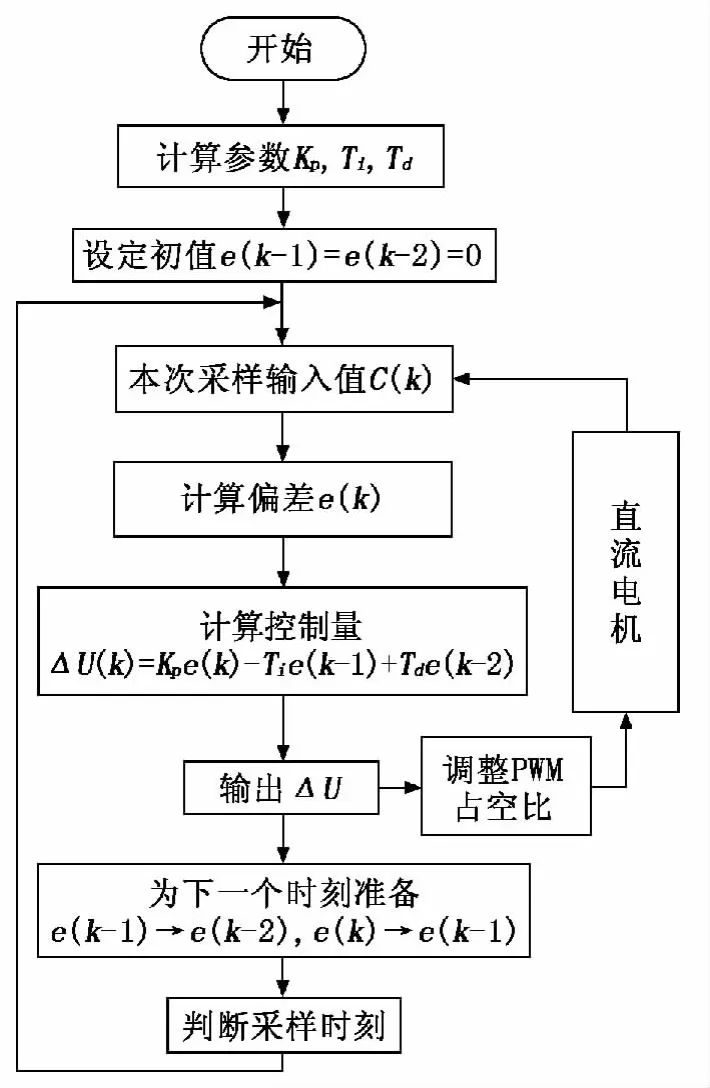
图5 PID算法的流程图
[1] 胡发焕,邱小童,蔡咸健.基于场效应管的大功率直流电机驱动电路设计[J].电机及控制应用,2011,38(4):21-24.
[2] 王维冬.电动液压助力转向用BLDCM工作原理及控制策略[J].机械设计与制造,2010(3):262-264.
[3] 曾建安,曾岳南.MOSFET和IGBT驱动器IR2136及其在电机控制中的作用[J].电机技术,2005(1):13-15.
[4] 刘铮,李醒飞,陈诚.一种非标准VGA-TV转换器的实现[J].电子技术应用,2007(5):70-72.
[5] 钟晓伟,宋蛰存,姜忠.模糊PID控制器在无刷直流电机控制系统中的应用[J].化工自动化及仪表,2010,37(8):87-89.
猜你喜欢
大电机技术(2022年5期)2022-11-17
电子制作(2019年16期)2019-09-27
汽车维护与修理(2019年3期)2019-08-08
汽车维护与修理(2018年5期)2018-09-29
汽车维护与修理(2018年23期)2018-07-03
北京航空航天大学学报(2017年3期)2017-11-23
汽车维护与修理(2017年5期)2017-11-17
电子制作(2017年1期)2017-05-17
火控雷达技术(2016年1期)2016-02-06
西部广播电视(2015年8期)2016-01-16