
反射式超声CT实验装置的研究*
2014-05-14 11:34冯利军严杨飞何俊梅裔士源周梦迪曾碧新
网络安全与数据管理 2014年2期
冯利军,严杨飞,何俊梅,裔士源,周梦迪,曾碧新
(温州医科大学 信息与工程学院,浙江 温州325000)
CT是计算机层析成像术(Computer Tomography)的缩写,自70年代问世以来已日趋成熟,其中超声CT广泛应用于医学、工业无损探测、地质探测等领域中。实际应用中的超声CT装置十分庞大复杂,且价格昂贵。目前,国内对反射式超声CT实验装置有一定的研究,但未见相关产品报道。如果能开发出一款用于教学的反射式超声CT实验装置,则将大大有助于学生熟练操作CT及了解CT的工作原理,对物理上反问题的求解过程也有直接的体会[1]。
反射式超声CT实验装置是一款用于模拟反射式超声CT装置操作过程的教学实验仪。其采用对人体无伤害的超声波,使用大众化的零件,易于更换及维修,成本低,结构简单,可用于高校CT教学。学生通过操作该装置可迅速了解CT的操作过程及工作原理,了解图形重建,体会进行CT模拟实验的意义[2]。本装置在VB操作界面上输入相应指令,经串口通信将数据传给单片机,通过STM32单片机控制平台左右移动、上下升降以及旋转。通过单片机处理测得待测物体到超声模块的距离,并通过串口通信传给VB操作界面。通过ActiveX控件技术实现Matlab与VB的连接,系统采集的数据经Matlab预处理,筛选出有用的数据进行插值和拟合,运用重建算法还原被测物体轮廓的图形。
1 装置设计原理
反射式超声CT实验装置由8个模块组成:收发一体超声模块、单片机控制单元模块、串口通信模块、稳压电源模块、三维机械平台、步进电机驱动模块、Matlab图形重建模块和计算机VB操作界面模块。装置原理图如图1所示。三维机械平台工作数据通过计算机VB操作界面及串口通信传输到单片机控制单元,单片机控制单元对数据判断后,通过步进电机驱动模块驱动步进电机,从而控制三维机械平台工作。单片机控制单元控制收发一体超声模块发射接收超声波,经过单片机处理获取收发一体超声模块到待测物体的距离,将这个数据通过串口通信传输给计算机VB操作界面,VB通过连接Matlab,重建轮廓图形,在VB操作界面成像窗口显示重建轮廓图形。

图1 装置原理图
2 下位机硬件构成
2.1 单片机控制单元模块
单片机是反射式CT实验装置的控制中心,负责控制收发一体超声模块的发射接收超声波,通过串口通信与计算机VB操作界面进行数据传输以及控制三维机械平台的旋转、左右平移和上下升降。采用STM32单片机,工作电压为 3.3~5.5 V,工作频率范围为 0~72 MHz,能很好地控制系统的各个部分。
2.2 三维机械平台
单片机通过控制步进电机驱动器驱动步进电机工作,从而控制三维机械平台的旋转、平移、升降。由于收发一体超声模块存在盲区,平移平台与升降、旋转平台相距一定距离,本装置实际相距32 cm,来消除盲区对实测距离的干扰。本装置采用的步进电机的型号为42HE1410M-24S,驱动电流为 1.5 A,步距角为 1.8°,通过步进电机驱动器调节细分来改变步距角从而调节扫描精度。三维机械平台工作流程图如图2所示。

图2 三维机械平台工作流程图
2.3 稳压电源模块
稳压电源模块给STM32单片机、收发一体超声模块、步进电机驱动器、三维机械平台供电。开关电源提供24 V电压,经过7805稳压后转为5 V电压。稳压电源模块电路图如图3所示。C1、C2、C3、C4分别是电源模块输入输出的滤波电容,获得波纹较小的电压。R2为发光二极管的限流电阻,发光二极管作为电源指示灯,如果电源模块工作正常,二极管被点亮。

图3 稳压电源模块电路图
2.4 收发一体超声模块
收发一体超声模块采用单个超声波换能器,采用脉冲驱动换能器发射超声波,当发射停止时换能器转为接收器,经过一段时间后,接收反射回来的超声波。经过分析处理后就可以测得障碍物的距离:s=ct/2,s为超声波传播的距离,c为超声波在介质中的传播速度(在空气中超声波速为340m/s),因此只要测得超声波传播的时间t,就可以得到收发一体超声模块到待测物体的距离。其工作电压为5 V,超声探头的余震时间太长,会导致超声模块的盲区相应增大[3]。为了减小盲区对收发一体超声模块到待测物体所测距离精度的影响,本装置增大了收发一体超声模块与待测物体之间的距离。收发一体超声模块原理图如图4所示。STM32单片机控制超声换能器发射超声波,超声波遇到待测物体反射回来,超声换能器接收超声波,信号经过前放、主放、幅值甄别、电平转换、A/D转换之后传输到STM32单片机[4]。

图4 收发一体超声模块原理图
2.5 串口通信模块
串口是单片机控制单元与计算机VB操作界面的通信通道,实现单片机与VB间的数据传输信息交换。采用全双工、异步通信方式实现STM32单片机与VB间的通信,配置波特率为9 600 b/s。
3 系统软件设计
3.1 下位机软件设计
本装置通过VB中的控件MSCOMM的属性设置与STM32单片机串口设置相匹配,实现串口连接从而实现数据的人为发射和自动接收。初始化STM32单片机,VB与STM32单片机进行通信后,开启定时器,就可以通过VB操作界面来发送和接收数据。STM32单片机根据接收的数据进行了分析判断,从而控制三维机械平台的升降、旋转、平移。STM32单片机获得收发一体超声模块到待测物体的距离,通过串口通信传输到VB操作界面并保存。下位机程序流程图如图5所示。
3.2 上位机软件设计
上位机程序采用VB编写,程序主要功能包括:
(1)用户登入注册;
(2)接收下位机上传的数据;
(3)向下位机传送数据,控制步进电机的左右、升降、旋转运动;
(4)将待测物体与收发一体超声模块的距离、移动距离、旋转角度等数据保存在txt文档里;
(5)VB与Matlab连接,调用Matlab软件处理源数据;
(6)重建待测物体的轮廓图形。
STM32单片机处理测得待测物体到收发一体超声模块的距离,并通过串口通信传输给VB操作界面,VB操作界面将采集的数据存储于txt文档中。通过ActiveX控件技术实现Matlab与VB的连接,控制VB操作界面,Matlab调用存储采集数据的txt文档,对其进行预处理,筛选出有用的数据进行插值和拟合,根据待测物体选择重建算法,还原待测物体轮廓图形,在VB操作界面成像窗口显示重建轮廓图形。上位机程序流程图如图6所示。

图5 下位机程序流程图
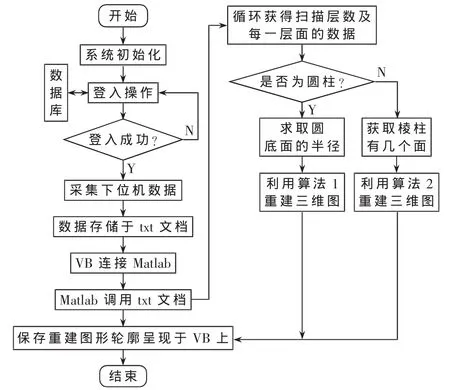
图6 上位机程序流程图
4 系统运行结果
反射式超声CT实验装置操作界面分为三维机械平台控制部分和图形重建显示部分。通过控制机械平台移动,采集不同位置收发一体超声模块到待测物体的距离,以及超声传感器的位置,通过图形重建算法重建待测物体的轮廓图形,在VB操作界面成像窗口显示。待测物体实物图如图7所示。圆柱组合体重建轮廓图形如图8所示。立方体与正三棱柱组合体重建轮廓图形如图9所示。

图7 待测物体实物图

图8 圆柱组合体重建轮廓图形

图9 立方体与正三棱柱组合体重建轮廓图形
收发一体超声模块测量距离表如表1所示。在一定测量范围内,收发一体超声模块的测量距离越大则测量精度越高,利于待测物体的图形重建,重建轮廓图形更接近实际轮廓。

表1 收发一体超声模块测量距离
本装置中Matlab与VB的连接并不复杂,而且与单片机通信的失误率很低,通信较为可靠。测量的盲区也可控制在20 cm以内。因为声波的速度与温度有关,测量值在非室温下准确度会下降,测量的结果需要校正,经过校正,本装置的测量距离精度符合实验教学要求,还可为其他的相关研究提供理论和应用基础。
本装置可以针对市场需求,增大其发射功率和测量距离。本装置还可以增加收发一体超声换能器的数量,以缩短检测时间、提高图像分辨率以及增大待测物体的种类范围。此外,本装置可以通过提高超声换能器测距的精度来提高成像效果。而本装置具有体积小、结构简单、零件大众化、易于更换及维修等优点,市场前景广阔。
[1]马文君,梁家惠.反射式超声CT用于物理实验教学的开发[J].物理实验,2004,24(4):6-8.
[2]舒文锋,程建政,蓝从庆.模拟生物样品的反射式超声 CT成像[J].声学技术,2000,19(1):19-22.
[3]华亮,堵俊,吴晓.新型高精度一体反射型超声波传感器测距系统研制[J].仪表技术与传感器,2008(4):80-83,96.
[4]兰羽,周茜.超声波测距系统接收电路研究[J].电子设计工程,2012,20(14):81-83.
猜你喜欢
锦绣·下旬刊(2021年11期)2021-10-12
装备制造技术(2020年11期)2021-01-26
中国电气工程学报(2020年2期)2020-07-28
科技视界(2019年20期)2019-08-29
新教育(2018年8期)2018-08-29
当代贵州(2017年49期)2017-12-19
物理实验(2017年2期)2017-03-21
世界汽车(2016年8期)2016-09-28
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
