电力系统稳定器在船舶电力系统中的应用
2014-05-07 03:19:26许丽霞施伟锋张威
船电技术 2014年12期
许丽霞,施伟锋,张威
电力系统稳定器在船舶电力系统中的应用
许丽霞,施伟锋,张威
(上海海事大学,上海 201306)
本文首先介绍了电力系统稳定器(PSS)的原理;然后,结合所搭建的船舶电力系统(大功率柴油发电机组)数字仿真模型,研究PSS在船舶电力系统中的应用;最后,通过对船舶电力系统在有、无PSS作用下的典型故障工况的对比仿真与分析,说明PSS能够有效提高船舶电力系统暂态稳定性。
船舶电力系统 励磁控制 电力系统稳定器 暂态稳定性 供电可靠性
0 引言
随着船舶电力系统容量的不断扩大,系统运行方式和负荷变化对系统阻尼特性的影响日益突出。电力系统阻尼特性的日益恶化,影响了系统暂态稳定性和供电可靠性,而船舶电力系统作为一个独立电力系统,其运行环境决定了船舶必须尽可能保证持续稳定供电[1]。电力系统稳定器(PSS)是一种附加励磁装置,能够补偿发电机励磁控制系统由于惯性产生的负阻尼,有效抑制系统低频振荡,是提高船舶电力系统暂态稳定性的重要方法之一。因此,将电力系统稳定器用于提高船舶电力系统暂态稳定性具有很高的研究价值。
1 PSS原理
当电力系统受到干扰时,发电机转子角出现振荡,而电压调节器及励磁系统具有惯性,其提供的附加转矩的相位落后于转子振荡的角度,它的一个分量与转速反相位,导致转子振荡角度加大,引发系统振荡[2],也就是低频振荡。

图1 电压调节器产生的负阻尼转矩和电压

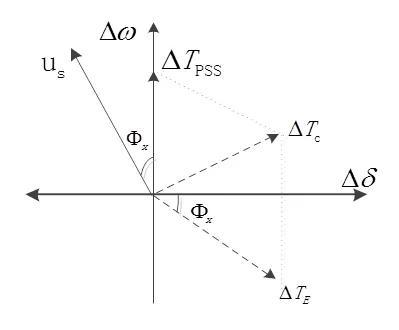
图2 PSS产生的负阻尼转矩和电压
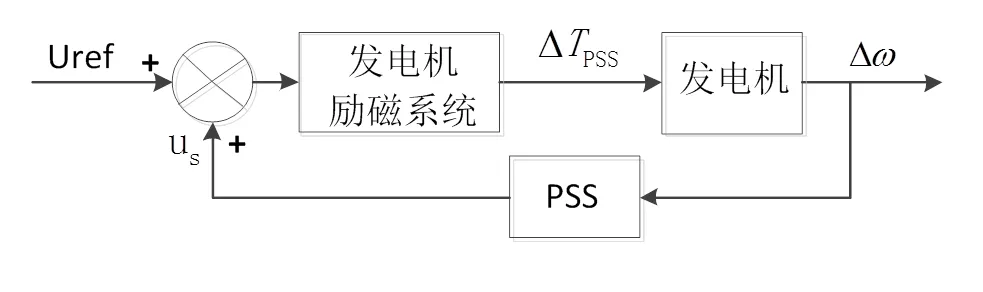
图3 PSS控制系统结构图
2 PSS结构及参数计算
2.1 PSS结构
现有的电力系统稳定器有PSS1A、PSS2B、PSS3B、PSS4B。


图4 PSS1A结构图

图5 PSS2B结构图
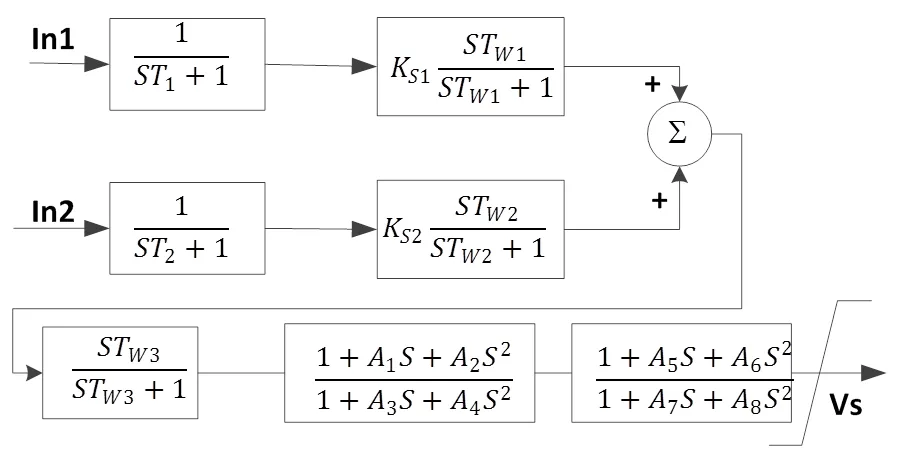
图6 PSS3B结构图

综上所述,本文选择PSS1A应用于船舶电力系统中。
2.2 PSS参数计算
电力系统稳定器参数计算方法主要有相位补偿法和特征根配置法两种方法。相位补偿法是建立在同步转矩和阻尼转矩的基础上,根据发电机励磁系统产生的负阻尼计算PSS增益环节和相位补偿环节的参数。特征根配置法与相位补偿法唯一不同之处在于:将发电机传递函数的特征方程分成实数部分和虚数部分,但是在计算过程中需先设定发电机时间常数,且与发电机励磁系统参数没有直观的联系因此,因此,文章用相位补偿法的计算PSS参数。
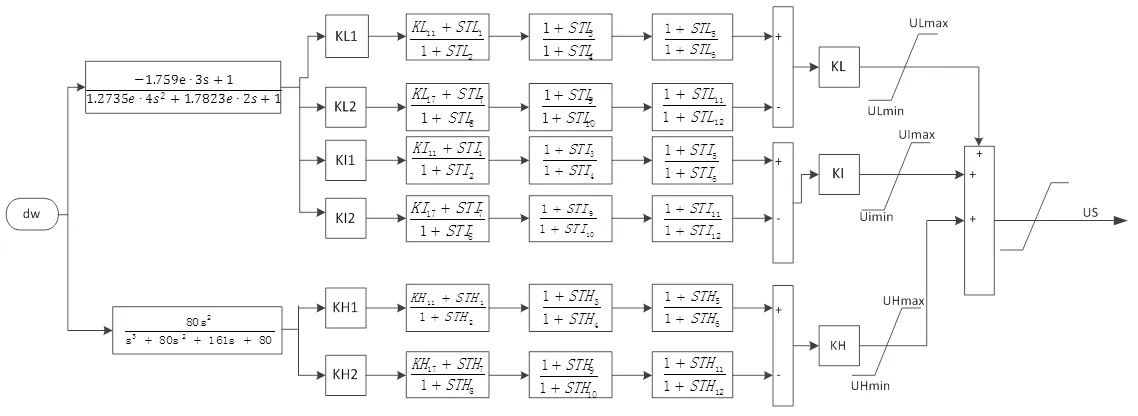
图7 PSS4B结构图
根据PSS的工作原理,PSS参数的整定与发电机及其励磁系统密切相关,发电机和励磁系统传递函数用表示,PSS传递函数用G(S)表示。通过对系统进行仿真,求取发电机及其励磁系统脉冲响应曲线,结合最小二乘拟合方法,求得的等效表达式为:

加入PSS后,阻尼0增加到1,且自然振荡频率不变,则有:

根据PSS控制系统结构图,可知:

将系统的阻尼提高到0.5,即1=0.5时,系统会有较理想的动态特性。将(1)、(2)及1带入(3)式得:

实际工程中,运用PSS对电力系统进行控制时,在理论计算的基础上,需经过反复调试,才能得到较合适的PSS参数[6-8]。
3 船舶电力系统模型
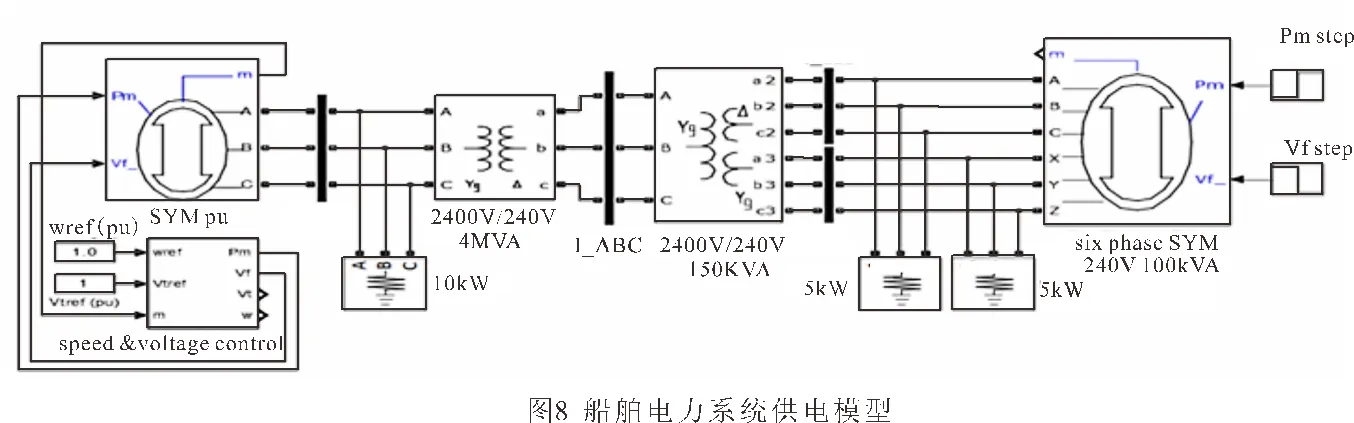
在SimPowerSystems环境中建立船舶电力系统供电模型,如图8所示。主要模块与参数有:

2)原动机及调速系统:包括柴油机及其调速器模块、电机信号分离模块。
3)电动机为六相同步电动机:

4)变压器:包括6相变压器和3相变压器。6相变压器电压等级240/240 V,3相变压器电压等级2400/240 V。
4 电力系统稳定器在船舶电力系统中的应用
在无PSS控制、PSS控制工况下,分别对船舶电力系统进行两相短路、重载过负荷仿真试验。仿真运行结果分别如图9、图10。
两相短路故障:系统设置4.0~4.8 s之间发生故障,故障地点为电动机定子侧输入端。
重载引起的过负荷故障:系统设置在4.0s发生故障。
根据图9(a1)、(b1)和图10(a2)、(b2)可知,与无PSS控制时相比,PSS对船舶电力系统的控制具有如下优点:
1)PSS能在一定程度上提高系统暂态稳定性,具体表现在:
对于电力系统重载过负荷故障:
无PSS控制时,发电机在4.0~5.0 s间发生3次较大振荡;在6.0~8.0 s时发生3次较大振荡;在9.0~10.0 s时,再次发生2次较大振荡;电动机在4.0~5.0 s发生2次大的振荡;在6.0~7.0 s之间发生3次较大振荡;在9 s发生大的振荡。
PSS控制时,发电机在4.0~5.0 s之间发生2次振荡;电动机在7.0~8.0 s之间发生3次振荡。
PSS控制电机转速振荡次数少于无PSS控制振荡次数,且系统由暂态至稳态过渡时,曲线更平滑。

图10 过负荷故障仿真结果图
2)PSS能缩短电力系统由暂态至稳态的过渡时间,提高系统的快速性。具体表现在:
对于电力系统两相短路故障,无PSS控制时系统在4.0~10.0 s由暂态过渡到稳态,持续时间为6 s。PSS控制时系统在4.0~7.8 s由暂态过渡到稳态,持续时间为3.8 s。PSS比无PSS控制过渡时间缩短2.2 s。
对于重载过负荷故障,无PSS控制时系统可能失去稳定。PSS控制时系统在4.0~8.2 s由暂态过渡到稳态,持续时间为4.2 s。PSS比无PSS控制过渡时间大大缩短。
但是PSS对船舶电力系统的控制仍然存在问题,主要表现在:
1)船舶电力系统在实际运行中,负荷变化量大,系统运行状态发生变化时,通过仿真整定的PSS不能根据系统运行状态进行合适的参数调整,自适应不够。如系统重载过负荷时,系统暂态持续时间为4.2 s,持续时间较长。因此,不能对系统进行实时精确控制。
2)PSS对船舶电力系统进行控制时,控制精度不高,如系统重载过负荷时,电机振荡幅度较大。
综上所述,PSS为发电机励磁控制系统提供附加励磁,对抑制船舶电力系统低频振荡具有有效性,但还需要进一步的研究以提高PSS对船舶电力系统故障暂态过程的改善。
[1] 施伟锋, 许晓彦. 船舶电力系统建模与控制[M]. 北京: 电子工业出版社, 2012.
[2] 刘取.电力系统稳定器及发电机励磁控制[M]. 北京:中国电力出版社, 2007.3.
[3] 霍承祥, 刘取, 刘增煌. 励磁系统附加调差对发电机阻尼特性影响的机制分析及试验[J]. 电网技术, 2011, 35(10): 59~63.
[4] 刘增煌. 同步电机励磁控制的任务及其设计思想比较[J]. 电网技术, 1999, 22(8): 6~9.
[5] 汤凡, 刘天琪, 李兴源.电力系统稳定器及附加励磁阻尼控制器对次同步谐振的影响[J]. 电网技术, 2010, 34(8): 37~40.
[6] 张军政. 华润电厂300 MW发电机组的电力系统稳定器参数整定试验[J]. 电网技术, 2005, 9(11), 73~76.
[7] 吴跨宇, 陈新琪. 运行工况对电力系统稳定器PSS现场参数整定影响的研究[J]. 浙江电力, 2013, 3: 1~5.
[8] 吴志杰. 电力系统稳定器PSS及整定实验问题探析[J]. 中国电业(技术版), 2013, 7: 74~76.
Application of Power System Stabilizer to Ship Power System
Xu Lixia, Shi Weifeng, Zhang Wei
(Shanghai Maritime University, Shanghai 201306, China)
()
TM74
A
1003-4862(2014)12-0031-04
2014-05-19
高等学校博士学科点专项科研基金(20123121110003);上海市教委科研创新重点项目(12ZZ155)。
许丽霞(1988-),女,硕士生。研究方向:船舶电力系统。
猜你喜欢
课外生活·趣知识(2023年8期)2023-10-08 18:09:15
大电机技术(2021年5期)2021-11-04 08:58:28
河北电力技术(2021年2期)2021-07-29 09:16:30
电子制作(2018年14期)2018-08-21 01:38:28
电子制作(2018年1期)2018-04-04 01:48:34
大电机技术(2017年3期)2017-06-05 09:36:02
电子测试(2017年23期)2017-04-04 05:07:02
水利技术监督(2016年6期)2017-01-15 14:01:44
机电信息(2015年12期)2015-02-27 15:56:17
水电站机电技术(2014年4期)2014-10-13 08:30:07