基于UKF的水下地形匹配算法组合
2014-05-07 01:35:34冯炜张静远谌剑
船电技术 2014年2期
冯炜,张静远,谌剑
基于UKF的水下地形匹配算法组合
冯炜1,张静远1,谌剑2
(1. 海军工程大学兵器工程系,武汉 430033;2. 解放军91868部队,海南三亚 572016)
为了克服断续地形辅助导航给UKF算法带来的不利影响,提出了改进TERCOMICCP+UKF地形匹配组合算法。首先分析了基于UKF的水下地形匹配算法及其在实际水下地形辅助导航中的局限性。然后,针对UKF地形匹配效果易受大初始位置误差影响的不足,以“粗搜索”+“精匹配”的算法组合模式为基础,给出了TERCOM、ICCP和UKF匹配算法的组合策略和算法克服相似地形影响的方法。仿真显示,较之单一UKF匹配算法,组合算法能够克服了大初始位置误差对算法匹配效果的影响,具有更好的工程适用性。
UKF 水下地形匹配算法 组合算法 水下地形辅助导航
0 引言
地形匹配算法是水下地形辅助导航的核心内容之一[1],匹配算法的好坏会直接影响到整个匹配系统性能的优劣。目前,常见的地形匹配算法有地形等高线匹配(TERCOM)、迭代最近等深点法(ICCP)[2-4],尽管它们优点明显,但在实际应用中也表现出各自的不足。比如:TERCOM算法虽然简单,容易实现,特别是在初始定位误差较大的情况下,仍然能够正常工作,可是它作为一种批处理方法,实时性较差,而且必须保证水下自主航行器(AUV)在匹配过程中不能作任何机动[3]。ICCP算法尽管可以使得AUV在匹配过程中进行一定的机动,但是在寻找等值线上最近点的过程中运算量很大,影响了其工程应用效果[8]。
无迹卡尔曼滤波(UKF)[5]算法是一种新型的非线性滤波地形匹配算法。由于该算法能够对导航系统误差进行实时修正,并且在初始位置误差不大的情况下,具有较高的匹配精度,故具有较好的工程应用前景。但在实际地形辅助导航过程中,由于水下地形先验数据信息量或测深设备性能等条件的限制,使得地形匹配辅助导航并不能贯穿于AUV的整个航行过程。当AUV驶入匹配区时,若导航设备提供的初始位置估计误差较大,UKF地形匹配算法的收敛时间将大大增加,匹配精度也将受到影响。针对单一UKF算法原理的改进策略对算法匹配效果的提升有限,并且一定程度影响了算法的实行性。若将TERCOMICCP与UKF算法进行组合,利用批处理匹配算法解决大初始位置误差对UKF的影响,便可提高UKF匹配算法的实用性。
1 基于UKF的水下地形匹配算法
1.1 算法原理
UKF是一种建立在Kalman滤波框架下的,以无迹变换(UT)[5]理论为基础的非线性滤波方法。其核心思想是通过确定性采样,实现对近非线性状态分布的逼近。
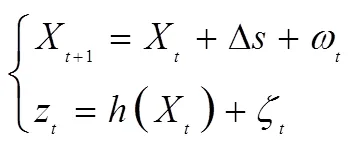
若水下地形匹配模型可表示为如下形式:
1)初始化
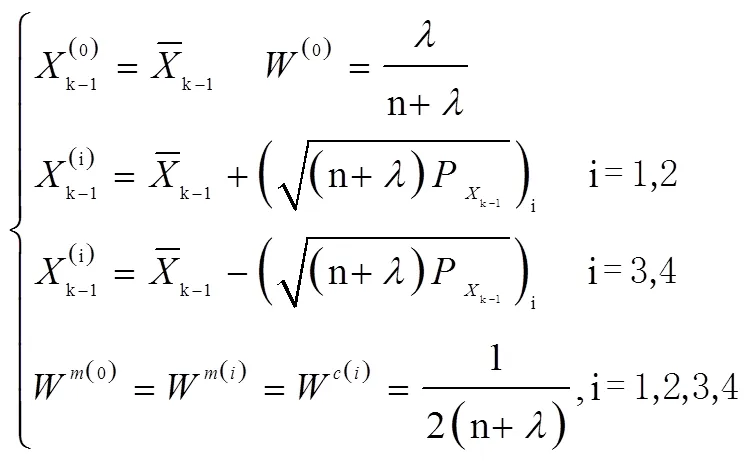
其中,为比例因子,用于控制各采样点与均值间的距离,=2为系统方程维数,(0),c(0)分别为中心Sigma点0的均值、方差的对应权值;m (i),c(i),分别为对称Sigma点i的均值、方差的对应权值。
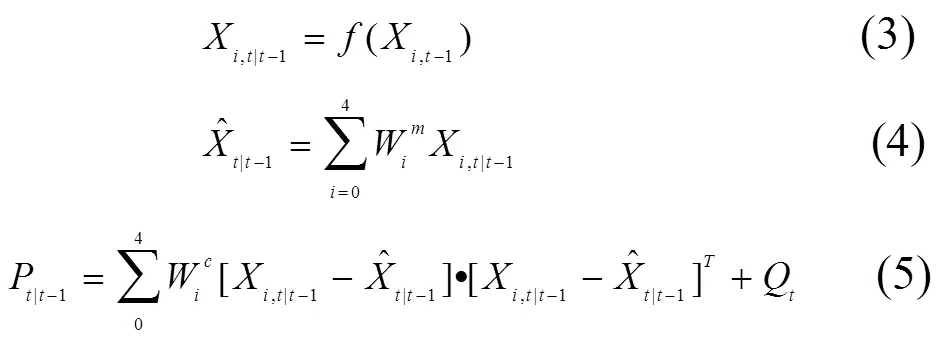
2)时间更新

3)量测更新

在本次滤波的基础上,重复以上时间更新和量测更新过程,就能实现对AUV路的连续估计。
1.2 UKF水下地形匹配算法的不足
在实际应用中,特别是测深设备量程不足、数字地图分辨率较低和地形平坦形成的“匹配盲区”将严重影响水下地形匹配算法的应用[2,6,7,8,9,]。通常,解决“匹配盲区”的有效方法有航路规划和断续匹配。相比两种方法,断续匹配方法较之航路规划对AUV航路的约束更少,故具有更好的工程适用性。图1为断续匹配示意图。

图1 断续地形辅助导航示意图
I区和II区分别为任务航路上的两块可匹配区域,其余空白处为“匹配盲区”。航路AB,AUV采用地形匹配辅助导航,而航路BC, AUV改用诸如惯导等导航方式进行导航;当行至C点时,AUV再次具备了地形辅助导航的条件,于是在导航系统提供的定位及导航偏差信息的基础上,采用地形匹配算法对导航误差进行逐渐修正。由图可以看出,AUV在匹配起点A处下水,此时导航误差较小,地形匹配算法仅需对较小区域进行搜索便可实现算法的收敛;而在匹配起点C处,由于AUV经历了一段“匹配盲区”航行,导航系统在陀螺漂移等因素的影响下,积累了较大的定位偏差。此时,地形匹配算法所需要搜索的区域将远大于A处。由于“地形盲区”广泛存在且无法避免,故类似C点的大偏差匹配起点可能在一条任务航线上多次出现。另外,基于UKF的水下地形匹配算法收敛需要经历一定时间的递推滤波过程,随着初始导航偏差增加,这个过程也将随着变长,因此,大初始导航偏差条件直接影响到了UKF算法的效率,给工程运用带来了不便。
2 地形匹配算法组合模式分析
由于针对非线性滤波算法的单一改进策略较难克服大初始偏差的影响,故通常考虑根据不同地形匹配算法的特点,进行组合运用。基于上述思想,可以在“粗搜索”与“精匹配”的组合模式下[2],对不同类型的地形匹配算法进行组合应用,如图2所示。其中,组合算法在“粗匹配”阶段需对大范围区域进行匹配搜索。由于此阶段所追求的目标是迅速减小定位偏差,故对地图分辨率要求不高。“精匹配”以“粗搜索”阶段的估计结果为基础,通过切换算法种类,在高分辨率数字地图上实现更高精度的匹配运算。
在匹配算法的组合应用中,文献[2-4]分别给出了TERCOM+SITAN、TERCOM+ICCP、改进TERCOM+ICCP组合方法,并对组合算法的优缺点进行了分析,但在大位置偏差的修正方面,都采用TERCOM算法来完成。而在航向误差的修正上,文献[3-4]选用了ICCP算法,而文献[3]则没有考虑这方面影响,直接使用SITAN算法进行后续匹配。在文献[3-4]所提出组合算法中,TERCOM作为“粗搜索”手段,用于对大位置误差的校正;而ICCP则作为“精匹配”方法完成精匹配任务。但是,本文旨在TERCOM、ICCP、UKF进行组合,得到针对大初始偏航条件下适用性更强的组合匹配算法。即希望通过TERCOM和ICCP算法分别修正初始匹配点的位置误差和航向偏差,为UKF地形匹配算法的快速收敛提供保证。故将TERCOM和ICCP可作为“粗匹配”阶段的候选算法,而将UKF作为“精匹配”阶段的算法使用。其框图如下。
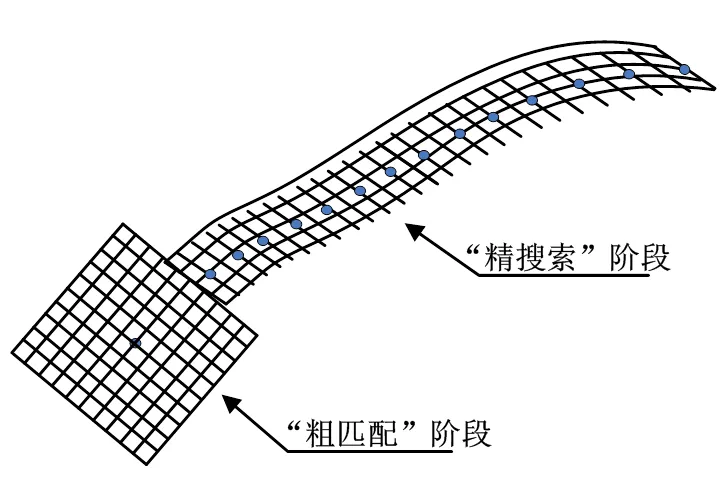
图2 组合模式
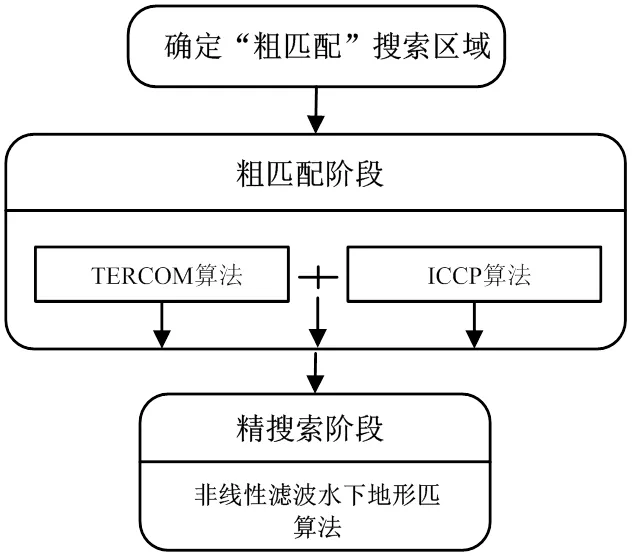
图3 TERCOMICCP+UKF组合地形匹配算法流程
3 TERCOM/ICCP+UKF模式
3.1 基本思路
首先,利用TERCOM算法来减小导航位置偏差并确保位置估计的准确性,由于此时TERCOM算法的匹配结果受到了航向偏差的影响,所以再利用ICCP来修正航向偏差,就是将TERCOM的匹配结果即一组地形高程序列传给ICCP,作为ICCP最初的指示航迹,然后进行迭代配准,得到ICCP匹配后的参考航迹,最后,找到参考航迹中的最后一个位置点,作为UKF算法的初始匹配点,进行UKF精匹配。
3.2 改进的TERCOM/ICCP+UKF
对于TERCOM算法而言,大范围平坦和相似的地形容易造成匹配结果的大幅波动,而对于已确定的可导区域,通常不存在大范围的平坦地形,故主要影响来自于相似特征的地形。由图4可以看出,在匹配区内存在两块地形特征相似的区域,分别用1-5和6-10的两组地形剖面编号表示。若AUV测得的实际地形剖面编号为3,由于测量误差的存在,TERCOM算法可能将8号剖面对应的航迹认定为最优估计航迹,从而影响ICCP算法的匹配效果。为避免TERCOM产生较大误差定位对ICCP算法的影响,本文以文献[4]为基础,提出通过位置的分布方差大小来衡量匹配结果准确与否。首先设定K和K两个阀值,其中K用于控制搜索区域中相似地形剖面的个数,定义如下:

图4 相似地形对TERCOM算法的影响
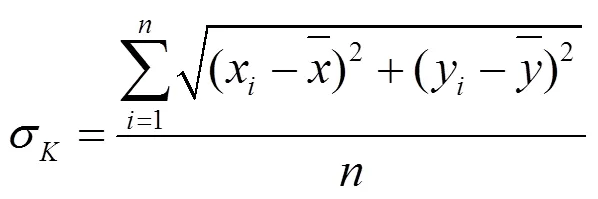
(15)
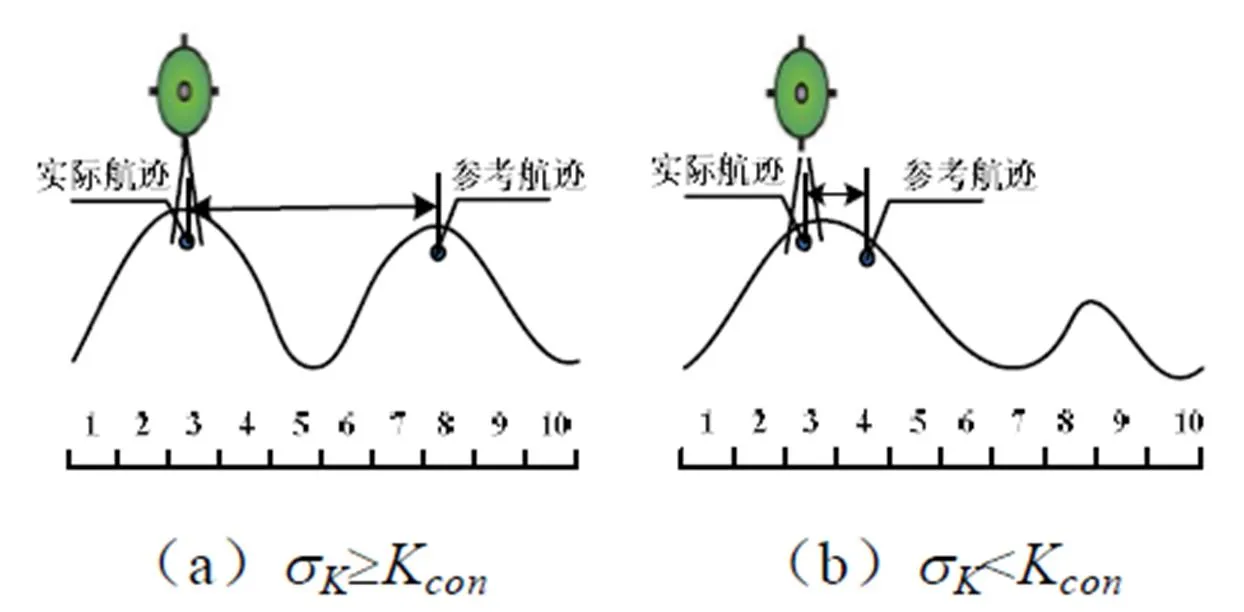
图5 TERCOM位置判断策略
组合TERCOMICCP+UKF匹配算法具体步骤如图6所示。
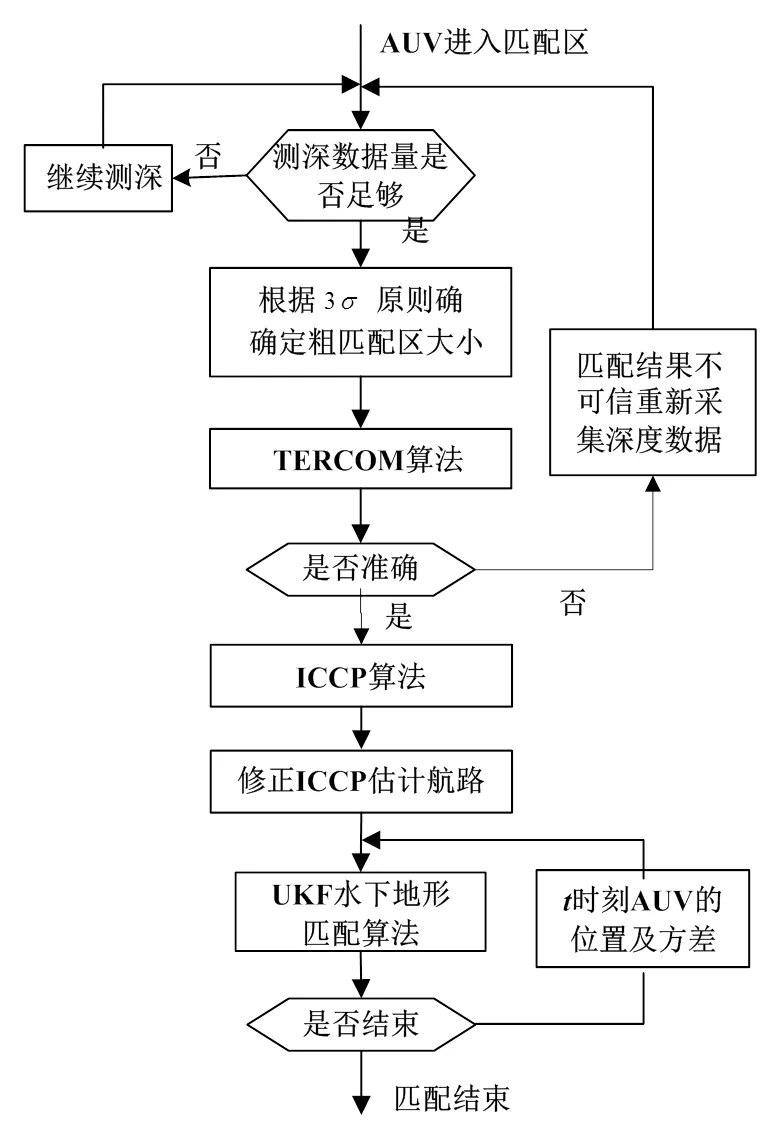
图6 TERCOMICCP+UKF组合算法流程图
4 仿真分析
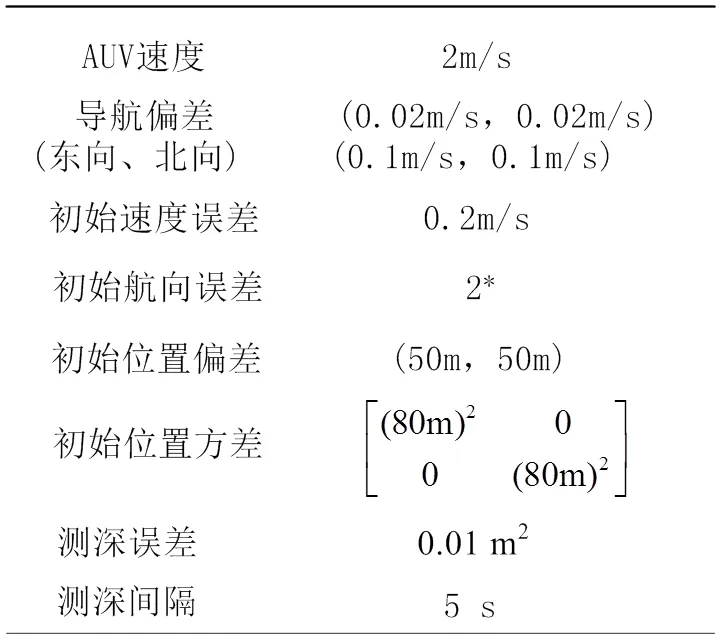
表1 仿真参数设定
图中,后验克拉美罗(PCRB )[11]通常用于衡量基于递推滤波技术的地形匹配算法的最佳匹配精度下界。与PCRB曲线越接近,说明该匹配算法的匹配效果越好。由图可以看出,组合算法的误差曲线与PCRB曲线更接近,证明了该组合算法较之单一UKF地形匹配算法性能更优。由于TERCOM和ICCP算法采用的是批处理方式,并不存在逐步收敛的过程,使得组合算法在粗匹配阶段的匹配误差迅速减小,为后续基于UKF的地形匹配算法快速收敛奠定了基础,较好的解决了大初始误差对算法匹配效果的影响,故具有更好的适用性。
5 结语
本文介绍了基于UKF的水下地形匹配算法的基本原理,结合实际条件,对水下地形辅助导航的局限性进行了分析,指出大初始导航偏差对UKF算法的不利影响,考虑到单一改进UKF算法较难克服这一不利影响,从而提出采用组合算法。在常用的“粗搜索”+“精匹配”的算法组合模式基础上,提出了一种基于UKF的改进的TERCOMICCP+UKF的组合匹配方法,最后通过仿真证明了该方法的可行性。
[1] 李临. 海底地形匹配辅助导航技术现状及发展[J]. 舰船电子工程, 2008, 28(2): 75-77.
[2] 辛廷慧. 水下地形辅助导航方法研究[D]. 西安: 西北工业大学, 2004.
[3] 张立, 杨惠珍. 基于ICCP和TERCOM的水下地形匹配组合算法研究[J]. 弹箭与制导学报, 2008, 28(3): 230-232.
[4] 王可东, 杨勇. 地形辅助导航方法和设备[P].中国: CN101339036A,2008-08-20.
[5] Julier S J. Unscented Filtering and Nonlinear Estimation [J]. Proc IEEE, 2004, 92(3): 401-422.
[6] 刘承香. 水下潜器的地形匹配辅助定位技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2003.
[7] 苑娜. 地形辅助导航系统的匹配算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2007.
[8] 杨绘弘. 基于ICCP的水下潜器地形辅助导航方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2009.
[9] 田峰敏. 基于先验地形数据处理的水下潜器地形辅助导航方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2007.
[10] 谌剑,严平,张静远. 基于数字图像处理的海底三维地形重建方法[J]. 计算机仿真, 2009, 26(10): 90-93.
[11] Bergman N. Recursive Bayesian Estimation Navigation and Tracking Applications[D]. Sweden: Link¨oping University,1999.
UKF-Based Underwater Terrain Matching Algorithms Combination
Feng Wei1, Zhang Jingyuan1, Shen Jian2
(1. Department of Weaponry Engineering,Naval University of Engineering , Wuhan 430033, China; 2. No.91868 PLA, Sanya 572016, Hainan, China)
TJ630.33
A
1003-4862(2014)02-0057-05
2013-09-02
冯炜(1988-)男,硕士。研究方向:兵器制导与控制。
猜你喜欢
河北理科教学研究(2021年3期)2022-01-18 05:34:24
发明与创新(2021年39期)2021-11-05 07:15:28
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
材料科学与工程学报(2016年1期)2017-01-15 13:33:48
系统医学(2016年8期)2016-02-20 02:55:08
汽车文摘(2015年11期)2015-12-02 03:02:53
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
电子设计工程(2014年20期)2014-02-27 12:01:00