
锂电池自动点焊设备的开发与研制
2014-05-04 11:22李诗语陈艾青
电动工具 2014年6期
李诗语 陈艾青
( 上海电动工具研究所,上海 200031 )
锂电池自动点焊设备的开发与研制
李诗语 陈艾青
( 上海电动工具研究所,上海 200031 )
分析影响锂电池点焊质量的主要因素,介绍在此基础上自主研发自动点焊设备,通过对该设备技术指标以及功能特性的表述,提出在锂电池包生产过程的点焊环节中,如何满足企业实际生产需要,从而提高点焊一致性、点焊速度以及点焊可靠性。
点焊 点焊设备 点焊工艺 锂电池包
0 引言
随着微电子技术的发展,小型化设备日益增多,这也对电源提出了更高的要求。具有高能效、低污染等特点的锂电池随之进入了大规模的实用阶段。当今手机、笔记本电脑、数码相机、电动车、电动工具、新能源汽车等行业规模迅速扩张,由此带来的锂电池需求同比持续增长。
为了满足电动工具、电动车、新能源汽车等行业高能量、高功率的电源需求,必须将单节锂电池电芯进行串、并联。因此,焊接技术对锂电池的应用十分重要。目前,锂电池焊接主要分为电阻焊和激光点焊。其中,电阻焊凭借着设备成本低、劳动条件好、操作简便等优点得到快速发展。
1 概述
电阻焊可分为点焊、缝焊和对焊。在锂电池生产制造中,主要采用点焊,其原理是利用工件自身电阻,通过电极对工件加压力和导通大电流,在工作接触面产生高热进行熔融金属的连接。
影响点焊的几个主要因素为:焊接电流,通电时间,加压力,电极材料。
对于焊接电流和通电时间因素,可采用米亚基点焊电源进行控制。米亚基电源特点:电流上升速度快,飞溅少,控制时间短(0.1~0.2 ms),控制灵活。
加压力则是控制接触电阻,施加压力与接触电阻成反比,压力控制多采用弹簧。
镍片是一种导电性相对较好、化学性质稳定、熔点较低的电极材料,可作为锂电池包的点焊连接片。
由图1所示可见,点焊即是利用柱状电极加压通电,在搭接工件接触面焊成一个焊点的焊接方法。点焊时,加压使得两个工件紧密接触,接通电流,电流经过电阻产生热量使局部金属被熔化形成液态熔核。断电后,保持压力或加大压力,使熔核在压力下凝固结晶,形成组织致密的焊点。焊完一个点后,电极移动至下一个点。

图1 点焊示意图
在实际生产中,手动点焊效率低、劳动强度大。通常,点焊人员手持制具,目测点焊位置将电芯与极棒对正后实施点焊。点焊时可能造成飞溅,操作者须戴好防护镜进行人身安全保护,繁琐的防护设备易造成目测及放置位置偏差,导致实际良品率较低。因此,采用自动化程度高的自动点焊机替代人工操作势在必行。根据实际生产所需,本文介绍一款符合企业需求的自动点焊机设备。
2 技术指标
如图2所示,该款自动点焊机点焊电源采用了米亚基MDA-8000B系列,MDA-8000B系列是精密电阻焊接用晶体管式电源,有着小型高效,高输出的焊接特点。机械部分由5个单臂机器人进行动作,分别为左X,右X,左Z,右Z,Y。电气部分由PLC和触摸屏进行控制。技术指标如下:
1)点焊对象:18650锂电芯
2)点焊方式:凸点点焊和尖针点焊
3)设备电源:AC 220 V/50 Hz
4)设备气源:Φ8 mm气管输入0.4~0.5 Mpa干燥气源
5)各轴定位精度:0.01 mm
6)方案存储量:储存20组点焊配方,每组最多40颗18650电芯。配方制具编号可备注
7)数据通信:支持SD卡储存和交换数据
8)外形尺寸:105×85×200 cm

图2 自动点焊机
3 控制原理
通过程控器(PLC)与触摸屏控制:5个伺服电机、导轨、丝杆组成的单臂机器人,进行点焊定位;点焊电源对工件进行点焊;采用绝对坐标控制,定位精准。在点焊位置时,通过点焊头给予可控压力,得到压力到位信号后,接通点焊电源点焊,保证点焊位置的一致性。定位速度可调,点焊效率提高。点焊机的系统结构如图3所示。
点焊机操作流程如图4所示。
点焊机总体动作流程如图5所示。
X,Y,Z轴伺服电机动作流程如图6所示。
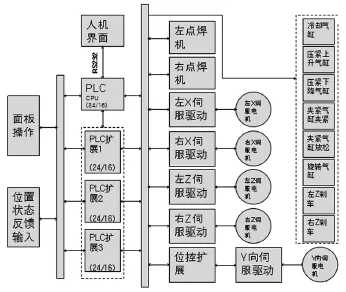
图3 自动电焊机系统结构图

图4 自动电焊机操作流程
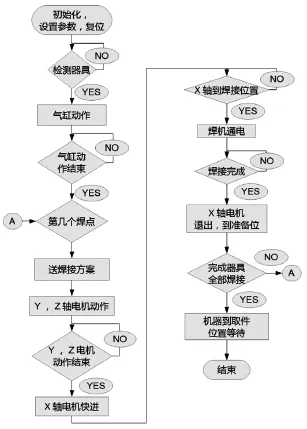
图5 自动点焊机总体动作流程

图6 X、Y、Z轴伺服电机动作流程
上述流程为自动运行流程。编写手动调整控制程序时,须注意Y,Z运动前应检查X轴是否在待机位或原点位,避免产生运动时序冲突,造成撞针现象,严重时可撞断点焊轴。Y轴手动调整流程图7所示如下,Z与Y轴手动调整类似。
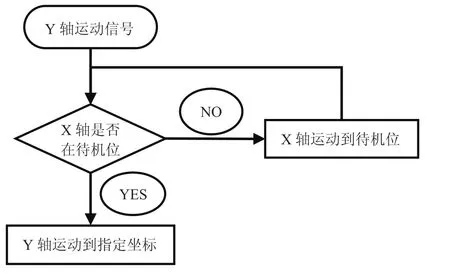
图7 Y轴手动调整流程
点焊机正常运行时,在取放制具地点安装安全光栅,保障人员安全,并且设有两个急停按钮,防止危险情况发生。在程序设计时,充分考虑到五轴连动产生干涉的情况,确保点焊工作中不产生运动碰撞,提高安全性。
4 界面显示
图8所示为自动点焊机的开机界面。
图9所示为触摸屏自动运行屏和手动界面。
图8 自动点焊机开机界面

图9 自动运行屏和手动界面
自动运行屏主要显示自动运行状态,如:产量组数,焊针使用次数,点焊位置,加工时间等。
手动操作界面可将点焊动作分解,手动进行点焊。
位置设定是更换制具时最常用的界面,可设置每个点的位置参数,通过上一点焊位置按钮、下一点焊位置按钮来调整和保存。在实际生产中,调整位置参数往往需要工艺工程师对点焊头与电芯的位置进行目测,所以在手动调整位置时,这台自动点焊机同时配备按钮盒,提高了调整参数的效率。
伺服设定界面可设置伺服电机的速度,加减时间。
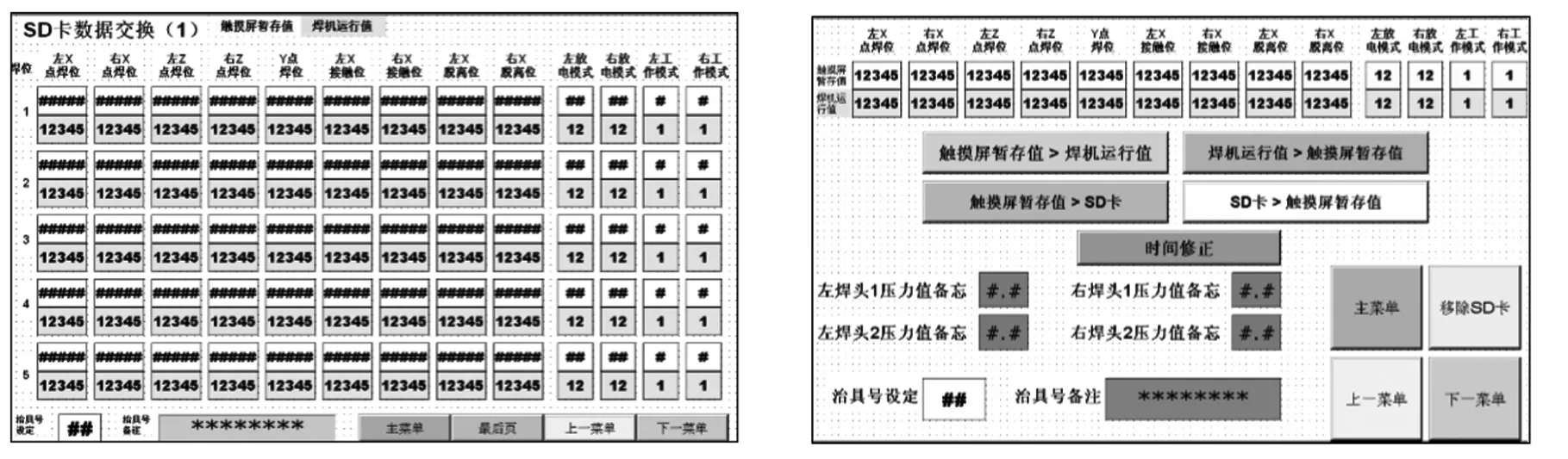
图10 配方设定界面
与同类产品相比,该自动点焊机根据实际生产的需要,加入配方以及历史记录等实用功能。
配方功能如图10所示。
在配方界面中,可将点焊位置坐标进行断电保存,输出至SD卡中,还可根据制具参数,直接修改位置坐标,缩减调整位置所需时间。配方功能与手动调整位置功能协同使用可以极大减少制具更换时间。更换新的制具,该自动点焊机可在30 min内完成位置设定,减少了工艺工程师的调整时间。对于点焊品种多样的电池包,可显著提升效能。
历史记录功能如图11所示。

图11 历史记录界面
历史记录可用来查询故障发生时间,记录内容可断电保存。点焊机运行状况一目了然,对于生产效能分析,设备可靠性分析有重要作用。
5 结语
该款自动点焊机与同类型点焊机相比,点焊一致性、点焊速度、点焊可靠性有较大提升,满足实际生产需求。目前,该点焊机已正常运行6个月,焊针使用次数已达40万次,点焊成品其镍片的抗拉强度大于标准值。整机设计指标达到了技术要求,能够满足电池包生产线长时间连续工作要求。
[1]陈立定,吴玉香,苏开才.电气控制与可编程控制器[M].广州:华南理工出版社,2001.
[2]孙宝元,杨宝清.传感器及其应用手册[M].北京:机械工业出版社,2004.
[3]中国机械工程学会焊接学会电阻焊(Ⅲ)专业委员会.电阻焊理论与实践[M].北京:机械工业出版社,1994.
Research and Development of Lithium Battery Automatic Spot Welding Equipment
Li Shiyu Chen Aiqing
(Shanghai Electrical Tool Research Institute, Shanghai 200031, China)
Analysis the main factors affecting the lithium battery spot welding quality, introduce the self-developed automatic spot welding equipment. Based on the technical index and function characteristic of this equipment, put forward how to meet actual production needs during the spot welding part of the production process of lithium battery packs, to improve the consistency, speed and reliability of spot welding.
Spot welding Spot welding equipment Spot welding process Lithium battery pack
TM08
A
1674-2796(2014)06-0009-05
2014-10-15
李诗语(1992—)男,本科,主要从事锂电工具产品专用设备开发设计和制造工作。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
电子制作(2018年23期)2018-12-26
小学生导刊(2017年17期)2017-05-17
科技知识动漫(2017年4期)2017-04-15
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
焊接(2016年5期)2016-02-27
百科探秘·航空航天(2015年3期)2015-12-01
焊接(2015年6期)2015-07-18
