永磁同步电机位置伺服系统滑模控制的研究
2014-04-27 08:44:38孙路路王玲丽
科技视界 2014年8期
孙路路 王玲丽
(安徽工程大学 电气工程学院,安徽 芜湖241000)
0 引言
工业对象的多样化和复杂化对伺服控制器提出了更高要求,即希望伺服系统具有一定的自适应能力和较强的抗扰能力,滑模变结构控制(SMC)能较好地解决这个问题[1]。SMC是50年代俄罗斯学者提出的一种有效的非线性鲁棒控制方法[2]。由于它不需要对系统的精确观测,控制率整定方法简单,易于数字实现,近年来,已有学者将SMC应用于伺服系统中,研究表明,它能有效改善摩擦非线性和负载时变性,提高系统鲁棒性[3-4]。
本文根据矢量控制PMSM伺服系统的特点,设计了一种SMC控制器,通过对控制量先微分后积分的处理,使其不含非线性项,减小了抖振;通过对伺服系统采取先速度SMC后位置SMC的方式,实现了位置跟踪和速度控制。文中将该方法应用于矢量控制PMSM伺服系统,仿真和实验结果均表明所设计的SMC控制器能使实际系统较好地实现位置跟踪和速度控制,较大地提高系统的快速性和鲁棒性,并减小抖振,有效地改善电机的动静态特性。
1 永磁同步电机数学模型
假设磁路不饱和,在空间磁场呈正弦分布,不计磁滞和涡流损耗影响条件下,采用id=0的PMSM转子磁场定向控制,转矩的大小只与定子电流的幅值成正比,实现了PMSM的解耦控制。这时,PMSM电压方程:

式中:ud、uq分别为 d、q 轴电压;id、iq分别为 d、q 轴电流;Ld、Lq分别为 d、q轴电感;r为定子电阻;Te为电磁转矩;P为电机的极对数;Ψa为永磁体与定子交链的磁链;TL为负载转矩;J为转动惯量;ω为转子机械角速度。
2 控制器的设计
伺服系统采用图1所示的控制方案,用SMC代替传统P与PI的双环控制。
SMC是基于相平面的控制,如图2示。其基本思想是将任一点出发的状态轨迹通过控制作用引导到滑模面(阶段a),同时保证系统在滑模面上的运动是渐近稳定的,即为滑动模态(阶段b)。

图1 伺服系统框图Fig.1 The structure of servo control system
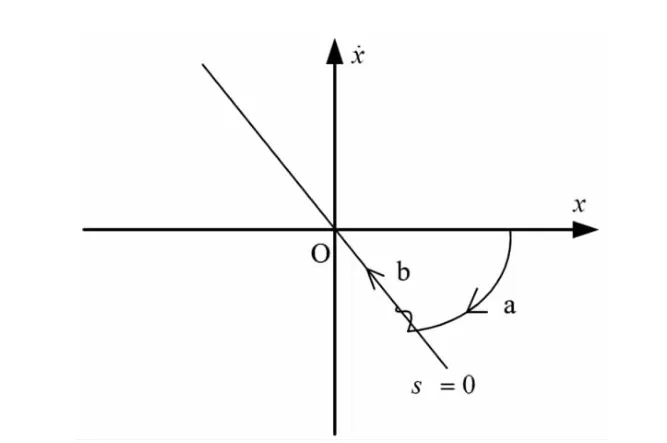
图2 SMC系统相平面轨迹Fig.2 The phase trace of SMC system
对系统位置采取SMC控制,取系统状态变量:
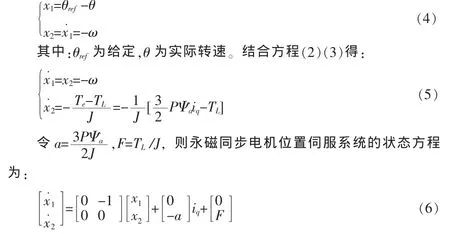
设计切换函数:

则由SMC到达条件 ss˙<0得:

图4是在给定角度200°时,采用位置SMC的仿真波形。可见,系统最终能无超调地达到稳定。
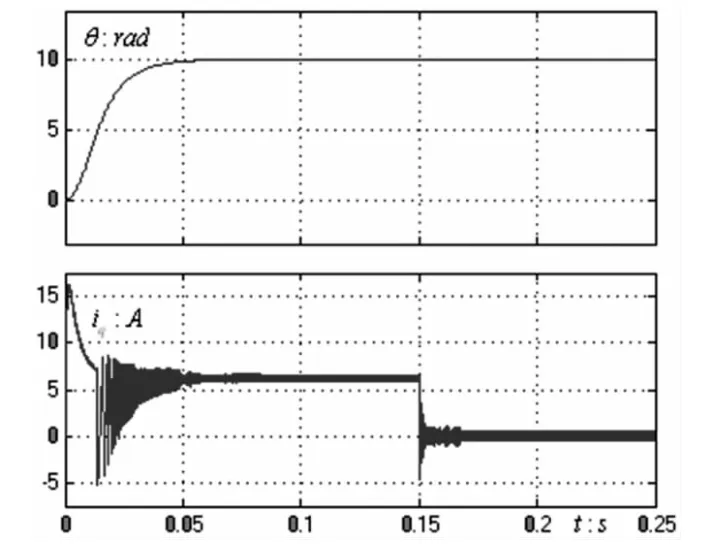
图3 突卸负载iq和位置误差波形

图4 伺服系统位置和速度波形
3 结论
本文针对矢量控制的PMSM伺服系统的特点,设计了一种SMC控制器,仿真表明,所设计的SMC控制器能有效实现PMSM速度和位置伺服。
[1]Kuo-Kai Shyu,Chiu-Keng Lai,Yao-Wen Tsai,,and Ding-I Yang.A Newly Robust Controller Design for the Position Control of Permanent-Magnet Synchronous Motor[J].IEEE Transaction on Industrial Electronics,2002,49(3):558-565.
[2]葛宝明,郑琼林,蒋静坪,于学海.基于离散时间趋近率控制与内模控制的永磁同步电动机传动系统[J].中国电机工程学报,2004,24(11):106-111.
[3]张希,陈宗祥,潘俊民,王杰.永磁直线同步电机的固定边界层滑模控制[J].中国电机工程学报,2006,26(22):115-121.
[4]刘云峰,缪栋.电液伺服系统的自适应模糊滑模控制研究[J].中国电机工程学报,2006,26(14):140-144.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
防爆电机(2020年6期)2020-12-14 07:16:54
测控技术(2018年12期)2018-11-25 09:37:44
光学精密工程(2016年3期)2016-11-07 09:03:49
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
电机与控制应用(2015年10期)2015-03-01 03:50:45
大电机技术(2015年5期)2015-02-27 08:22:28
电力工程技术(2014年6期)2014-03-20 14:19:46
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54