
引导智能园林工具的方法和系统
2014-04-10 02:49:12金轶
电动工具 2014年1期
引导智能园林工具的方法和系统
(美国专利号:US 20130184924 A1 欧洲专利号:EP2622425A1)
智能园林工具至少装有两个传感器件,当它沿着草地上的引导线行进时,传感器件会探测到由带电引导线产生的磁场强度。采用这样的方法和系统,能控制智能园林工具基于至少由两个传感器件探测得到的磁场强度差,沿着引导线行进。
该发明涉及智能园林工具,尤其是关于引导如智能割草机在内的智能园林工具的系统和方法。
◆背景
智能园林工具(简称工具),例如智能割草机(以下简称割草机)等,已经被广泛地应用于草地维护等工作场合。典型的割草机是一个使用电池作为电源的自动智能工具。考虑到工作负载的变化和持续工作的要求,需要周期性地充电。同时,割草机工作时往往处于无人照看的情景,在操作过程中,如果电池能量低于预设的能量水平时,需要自己找到通往充电站的路径。
当前,有很多技术用于引导割草机正确返回至充电站。首先,安装在充电站上的天线可以用于导航,使割草机返回充电站。但是,天线仅能覆盖充电站附近的有限区域,可能出现割草机在接近充电站前的这个阶段处于失联状态。其次,割草机还可以通过引导线返回充电站。引导线可以是边界界定线或草地上的穿通线。割草机装有一个或多个传感器以探测引导线的磁场强度。由于存在割草机每次返回路径相同的情况,这会在草地上产生并不理想的永久的可视轨迹或痕迹。
为了克服这个缺点,割草机被设计成沿着远处的引导线行进。在每次引导返回充电站时,可以随机选择割草机与引导线之间的距离。由于割草机返回充电站时依据固定的磁场强度,如果每次选择不同的磁场强度值,割草机去充电站时的路径就会不同。这个方法可以有效解决草坪上存在可视痕迹的问题。然而,这个方法不适用于草坪上的狭窄通道。因为在狭窄的通道上,如果智能割草机随机选择的磁场强度很小,就很难进行引导。
磁场强度还取决于很多动态变化的因素。这些因素包括引导线的电流、外界磁场的干扰、园林工具内部电子元器件的温度变化和电子器件在探测引导线磁场强度时存在的偏差。
◆概述
通过分析,需要提供一个改进的系统,为工具实行有效引导,解决或部分解决以上问题。
1) 工具引导系统完成了部分目标。引导系统至少包括一根适合传导电流的引导线,以便在引导线附近可以产生一个电磁场。工具可以在一定距离外跟随引导线行进。另外,工具装有第一传感器件和第二传感器件,两者相对于引导线能对不同的距离分别定位。第一和第二传感器件还负责探测磁场强度,工具的驱动基于第一和第二传感器件探测到的磁场强度的差值。使用探测到的磁场强度的相对差值可以确保工具在每个操作周期形成不同的路径,从而降低了草坪上存在可视标记的严重性。另外,相对差值的使用还降低了工具在草坪上出现故障的可能,甚至可以穿过狭窄通道。
2) 至少第一和第二传感器件之一可以探测磁场垂直分量的强度。磁场中的垂直分量是磁场在垂直方向的延伸部分。磁场垂直分量可以由传感器件之一通过垂直环形传感器、线圈或霍尔传感器等类似件完成。
3) 第一和第二传感器件沿着工具的长轴线方向安放,且相互之间应有一定距离,两者均面向工具的前方。此外,要求沿着工具的长轴线放置的传感器件之间的距离范围为4 cm~30 cm,在5 cm~20 cm的范围内较好,在10 cm~15 cm的范围内最好。
4) 第一和第二传感器件在垂直于工具长轴线方向的距离可以是5 cm~35 cm,在10 cm~30 cm的范围内较好,在15 cm~25 cm的范围更好,最好是20 cm左右。这样的话,引导线和第一传感器件的距离不同于引导线和第二传感器件的距离。通过这两个传感器件就会得到不同的信号强度。
5) 工具还可能包含第三个传感器件。三个传感器件在工具上的放置位置呈三角形,第二和第三传感器件沿垂直于工具长轴线的直线放置。第一传感器件沿工具长轴线的前方放置,这可以使工具沿着引导线顺时针或逆时针方向运动。工具的驱动是基于第一个传感器件测得的磁场强度和距离引导线较近的第二或第三传感器件测得的磁场强度的差值。工具的驱动也会基于第一个传感器件测得的磁场强度和距离引导线较远的第二或第三传感器件测得的磁场强度的差值。
6) 第一传感器件与第二和第三传感器件形成的直线之间的距离可以是4 cm~30 cm,在5 cm~20 cm的范围内较好,在10 cm~15 cm的范围最好。
7) 工具的长轴线与第一传感器件和第二和第三传感器件之一形成的直线之间的夹角可以是40°~80°,在50°~70°的范围内较好,在55°~60°的范围最好。
8) 引导线可以是草坪的边界界定线。引导线能传导非恒定的电流。
◆图示说明和实例描述
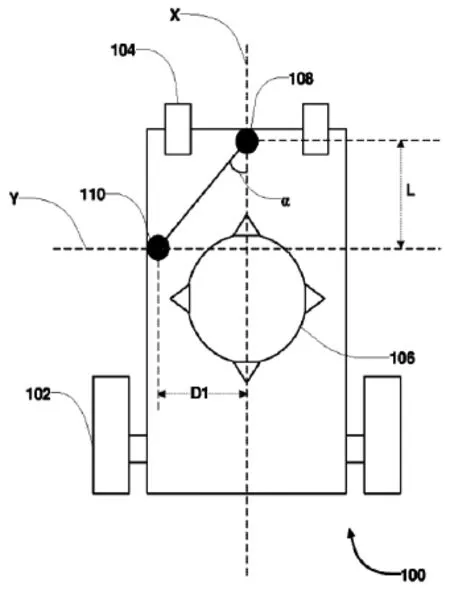
图1 安装了两个传感器件的智能园林工具

图2 安装了三个传感器件的智能园林工具

图3 智能园林工具引导系统框图
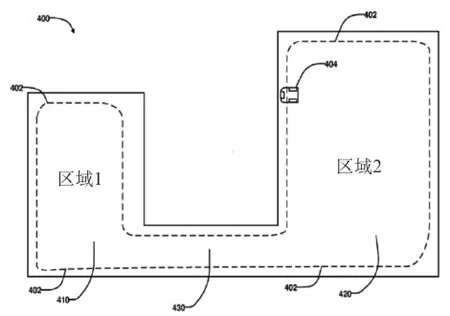
图4 含有各种通道的草坪的布置图

图5 引导智能园林工具方法的流程图
借助图示,可以详细描述该发明。
该发明可以体现在很多种形式中,产品的结构设计不必拘泥于所列形式。列出这些体现形式是为了将这个发明揭示得透彻和完整,可以全面地将发明所涉及的范围传递给相关工作人员。
图1显示安装了两个传感器件的工具100。工具是一台割草机,包括驱动轮102和脚轮104。工具装有切割系统106,其作用是在草坪上进行一个或多个操作。通常,草坪上安装有用于工具引导线的界定线。引导线散落在草坪的边界,通常被称作边界界定线。当电流通过引导线,会在引导线附近产生一个电磁场。引导线应能传导非恒定的电流。工具包含沿着园林工具长轴线X安装的第一传感器件108,沿着直线Y安装的第二传感器件110,直线Y与长轴线X正交。传感器件108和110可能形成垂直环状传感器。第一传感器件较第二传感器件的位置更靠近工具的前端。第一传感器件和沿着直线Y方向的第二传感器件的距离是D1。距离D1可能在15 cm~25 cm之间。有的设计中距离D1可能在10 cm~30 cm之间。通过第一传感器件和第二传感器件的直线与长轴线X构成角度α。在不同的设计中,α值的范围可能在40°~80°之间。第一传感器件108与直线Y的正交距离是L,直线Y与工具正常行进方向垂直,且第二传感器件是沿着直线Y放置的。在不同的设计中,正交距离L可能在4 cm~30 cm范围之间。由于第一和第二传感器件安放在工具上的不同位置,当工具沿着引导线运行时,器件与引导线之间的距离是不同的。传感器件108和110是用来探测引导线产生的磁场强度的。但在有的设计中,传感器件108和110可以是用来探测引导线产生的磁场垂直分量的强度。
通常情况下,希望工具能够跟随远处的引导线行进。由于每个操作周期下跟随工作的引导线的距离是不同的,这就可以确保每次都有不同的行进路径,避免在草坪上留下可视痕迹。为了确保每个周期有不同的行进路径,工具会装有过程处理单元,负责提供给驱动控制器一个或多个指示。该指示是基于第一和第二传感器件探测到的磁场强度的差值。根据过程处理单元提供的一个或多个指示,驱动控制器驱动工具沿着引导线行进,以这样一种方式维持传感器件测得的磁场强度是一个恒定的比率。
图2显示的是该发明按照另一种方式实现的智能园林工具。除了有第一和第二传感器件,还包含了位于直线Y上的第三传感器件202。如果工具是被设计成前后两个方向行进的,那么三个传感器件的安置可以是位于工具前后两个部分。三个传感器件可以使得工具跟随引导线顺时针或逆时针动作。沿着直线Y放置的第二和第三传感器件之间的距离是D2,距离D2的范围是距离D1的2倍。第二和第三传感器件放置在工具的后方。第一传感器件与直线Y的距离L较长,且第一和第二传感器件所在的直线与长轴线X的夹角α更小。为了驱动工具,需要比较第一传感器件和第二或第三传感器件之一探测得到的磁场强度。过程处理单元负责提供给驱动控制器一个或多个指示,该指示是基于第一和第二或第三传感器件探测到的磁场强度的差值。过程处理单元将选取探测到较高的磁场强度值(即与引导线靠得更近)的传感器件对工具进行引导。而在另一种设计中,过程处理单元将选取探测到的较低磁场强度值(即与引导线离得更远)的传感器件对工具进行引导。
图3显示了工具引导系统300的组成图。系统300包含传感单元302,而传感单元又包含一组传感器件(108、110和202)。传感单元负责探测引导线402产生的磁场强度,如图4所示,勾画了一个有410、420和430不同区域的草坪400。引导系统还包含一个储存单元304。储存单元是用来存储由传感器件302获得的磁场强度的。此外,引导系统还包含过程处理单元306,它用来给工具的驱动控制器308提供操作指示。过程处理单元306提供驱动控制器308的指示是基于从存储单元304或直接从传感器件302获取的磁场强度。过程处理单元提供驱动控制器308的指示是基于传感器件108、110和202探测得到磁场强度的相对差值。其中一种实现方式是相对差值基于第一和第二传感器件探测到磁场强度的差值。另一种实现方式是相对差值基于第一和第二或第三传感器件之一探测到磁场强度的差值,选取探测到较高的磁场强度值(即与引导线靠得更近)的传感器件对工具进行引导。当然,还有一种实现方式是相对差值基于第一和第二或第三传感器件之一探测到磁场强度的差值,选取探测到较低的磁场强度值(即与引导线离得更远)的传感器件对工具进行引导。
过程处理单元306会产生一个用于发现磁场强度相对差值的参考值Δref。参考值Δref是在工具的任意操作周期中随机产生的。随机选择参考值Δref的目的是确保在每一个操作周期工具跟随引导线的距离是不同的。这样可以避免草坪上形成可视痕迹。例如,如果参考值Δref设在10%,那么控制器会以传感器件108、110和202探测得到的磁场强度的相对差值的10%来驱动工具。如果是这样的话,从邻近引导线测得磁场强度的相对值也会变化,而且与磁场强度的绝对值无关。在有的设计中,引导系统取决于多个磁场强度的相对值,而对于决定磁场强度绝对值的一个或多个因素不敏感。这些不敏感因素包括但不限于流经引导线电流、通道上不同引导线之间的距离、土壤中引导线的深度、周边区域磁场干扰、传感器件的精确度以及工具上电气元器件的变化等等。
此外,相对值的使用还使得工具可以顺利通过草坪上的狭窄通道。例如,如果工具处于区域1的410,过程处理单元要求驱动控制器让工具前往充电站,而充电站位于区域2的420,这时工具需要通过一个狭窄的通道430。如图4所示,如果仅考虑磁场强度的绝对值,那么工具就不能越过狭窄通道到达目的地。但是如果使用了磁场强度的相对值,工具就可以沿着引导线402穿过狭窄通道430到达充电站404。正常情况下,相比远离引导线,在接近引导线时的磁场强度值会急剧下降。即使设置的相对值很小,工具也会设法远离引导线,因为驱动控制器会基于相对差值找到行进路线,当接近通道的另一头时,磁场强度的方向会发生改变,磁场强度值也会逐渐增加。因此,当工具接近狭窄通道上的引导线时,由任何一个传感器件测得的磁场强度之间的相对差值不仅可能为0,还可能是负值。
图5是依据一种设计对智能园林工具进行引导的流程图,该图总结了本专利的主要思想。在步骤502,工具沿着引导线402行进。在一种实例中,引导线402是边界界定线。在该发明的不同实现方式中,引导线402通电产生电流从而在引导线附近产生磁场强度。在步骤504,传感器件108和110测得引导线402的磁场强度。在一种设计中,传感器108和110可能是垂直环形传感器。当然,传感器件108和110还可以沿着长轴线X布置,之间的距离是L。当工具沿着引导线行进的时候,工具上的传感器件108和110距离引导线的距离不同。在有些设计中,传感器件108和110则是负责感知引导线产生的磁场垂直分量的强度。
(编译 金轶)
Method and system for guiding a robotic garden tool
猜你喜欢
民间故事选刊·上(2022年4期)2022-04-17 11:24:45
民间故事选刊(2022年7期)2022-04-15 03:19:18
净水技术(2022年1期)2022-01-13 00:45:28
科技资讯(2021年10期)2021-07-28 04:04:53
环境卫生工程(2021年3期)2021-07-21 05:34:36
广东通信技术(2020年7期)2020-08-13 06:01:42
时代文学·上半月(2019年6期)2019-12-13 07:20:41
商品与质量(2019年47期)2019-06-18 04:08:08
环球时报(2019-06-11)2019-06-11 06:17:18
农业科技与装备(2017年4期)2017-08-17 23:02:29
