
多特征融合的自适应性粒子滤波跟踪算法
2014-04-03 07:34于金霞许景民
计算机工程与应用 2014年18期
于金霞,许景民
YU Jinxia,XU Jingmin
河南理工大学 计算机科学与技术学院,河南 焦作 454003
College of Computer Science and Technology,Henan Polytechnic University,Jiaozuo,Henan 454003,China
1 引言
在复杂背景下进行快速鲁棒的目标跟踪一直都是计算机视觉研究领域的热点问题。它的主要任务是从图像序列中精确地定位目标的位置、速度和姿态等信息[1],可广泛用于军事和民用领域。目前已有很多学者在这方面进行了大量的研究,提出了很多有效的方法,形成了以均值漂移算法[2]为代表的确定性跟踪方法和以粒子滤波[3]为代表的概率性跟踪方法。确定性跟踪方法的优势是实时性较好,但这类方法的鲁棒性较差,在复杂背景或存在遮挡情况下的跟踪效果并不理想。概率性跟踪方法的优势是具有较强的抗遮挡和背景干扰能力,但这类算法的计算量较大,实时性有待改进。
近年来在国内外的研究中,为了同时提高跟踪的实时性和鲁棒性,特征或算法的融合已成为一种必然的趋势。有学者在粒子滤波框架下融合目标的颜色信息、运动信息和边缘信息等特征[4-6],很大程度上提高了算法的鲁棒性,但是由于需要的粒子数仍然较多,所以这些算法的实时性都不高。有学者将粒子滤波和均值漂移算法结合起来[7],并通过聚类算法减少参与均值漂移迭代的粒子数来提高算法的实时性,但是由于只使用颜色这一个特征来表示目标,算法的鲁棒性不高。提高目标跟踪鲁棒性的关键在于对目标特征的选择和度量图像序列中相邻两帧间目标相似性的方法[8],而为了提高目标跟踪的实时性,就必须降低在跟踪过程中所使用的粒子数目,提高粒子的有效性。实际上,当目标在运动过程中受到周围环境干扰较小时,使用少量粒子就可以达到稳定跟踪的目的,当目标在运动过程中受到周围环境干扰较大或存在遮挡的情况下,可以分配较多的粒子来增大粒子的多样性以保证稳定跟踪。为此本文在文献[9]提出的跟踪算法基础上,根据跟踪预测的准确程度自适应调整采样粒子数,从而可以在保障跟踪鲁棒性的前提下,通过整体上降低跟踪目标所需的粒子数目,达到提高算法实时性的目的。
2 目标跟踪模型
本文采用一阶动态模型来描述目标的运动规律,目标的状态(Sk)及其随时间的变化过程可以描述为:

其中,(x,y)表示目标的中心坐标;Hx和Hy分别表示目标区域的长半轴和短半轴;x′和 y′分别表示目标中心在图像中X和Y方向的速度;α表示目标区域的缩放变化;A表示状态转移矩阵;wk-1是一个多变量的高斯白噪声。
2.1 目标颜色特征的提取
颜色特征由于具有对目标的旋转及姿态变化不敏感性的优点,经常被用于对目标的跟踪。本文采用基于HSV颜色空间的加权颜色直方图表示以y为中心点的目标颜色分布
采用Bhattacharyya系数来描述目标特征 py和候选区域qy之间的相似性。

2.2 目标结构特征的提取
除了颜色这一特征外,在度量相邻两帧图像间目标相似性的时候还可以选择其他的特征,如纹理、方向梯度直方图等。目前一种新的评价方法是通过比较对比度、亮度和结构相似性三个参数来衡量图像之间的差异,这种方法易于实现且计算量较小。本文就是使用这种方法在灰度图像的基础上建立目标的结构模型。两幅大小一致的图像x和 y的结构相似性S(x,y)定义为:

其中,μ表示灰度图像的均值,σ表示灰度图像的方差,σxy表示这两幅灰度图像的协方差。
2.3 粒子权值的计算
每个粒子经过状态方程进行传递后,就表示目标在下一时刻的可能的状态,其与目标真实状态的相似度也即粒子的观测概率为:

其中,αk和βk为颜色和结构这两种相似性的融合系数,这两个融合系数在跟踪的过程中会进行自适应的调整。在当前预测的位置处,分别计算颜色相似性ρ′y(p,q)和结构相似性S′(x,y),哪个相似性越大,就说明当前该特征越可靠,应该赋予较大的系数。
2.4 粒子数量的自适应选择
当目标在剧烈运动或存在遮挡的情况下,需要使用较多的粒子以增加粒子的多样性,从而可以尽可能地覆盖目标的真实状态。当目标所处的背景比较简单时,采用较少的粒子数即可保证稳定的跟踪。当前时刻采样粒子数量的计算依据是,若上一时刻目标预测比较准确,则说明粒子的有效性越好,可以适当减少粒子数。反之,则表明当前粒子的有效性较低,这有可能是由于目标的运动状态有明显的变化或发生了遮挡等情况,此时应当增加采样粒子数,以包含目标的真实状态。

其中,Nt表示当前帧的采样粒子数;Nmin和Nmax分别表示粒子数的上限和下限;pe表示前一帧目标预测状态与真实目标状态的相似度;系数a,b的选择应使得粒子数位于合理的范围内,大量实验表明,取参数a=300,b=3使得Nt位于[60,150]的范围内,此范围可以保证粒子群的质量和跟踪的实时性。
3 算法流程
本文采用基于多特征融合的自适应性粒子滤波跟踪算法,以实现在复杂环境下对目标进行快速鲁棒的跟踪。算法的具体步骤如下:
步骤1初始化:粒子数的初始值设定为N0;在初始帧中手动选择目标区域;通过式(3)建立目标的颜色模型;在选定的目标区域中,以目标中心为坐标原点按照高斯分布随机采样,并赋予每个样本相同的权值,记为:
步骤4重采样:随着预测时间的推移,粒子有可能出现蜕化的现象。粒子的蜕化程度可以表示为Eff=,Eff越小,粒子蜕化就越严重,当Eff小于设定的阈值时,就进行重采样。
步骤5融合系数更新:根据式(8)和式(9)调整在预测t+1时刻目标状态时,颜色和结构这两种特征的融合系数。
步骤6粒子集更新:根据式(10)调整在预测t+1时刻目标状态时的粒子数Nt+1,从步骤2所得到的粒子集中复制出N个粒子。t+1
步骤7置t=t+1,转到步骤2。
4 实验结果及分析
为了验证本文所提算法的有效性,对该算法在Matlab环境下进行仿真实现。分别设计了针对汽车和飞机模型的跟踪实验,其中初始粒子的数目设为100,颜色和结构两种特征的融合系数初始都为0.5,加权颜色直方图由8×8×2个条柱组成,以粒子位置为中心点的宽为20个像素的正方形区域建立结构模型。
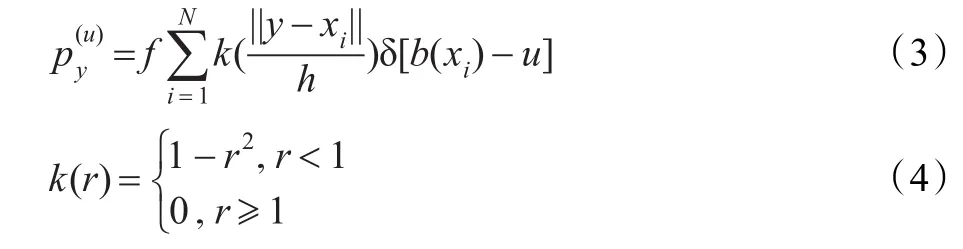
图1给出了本文算法和单纯使用颜色这一特征对汽车进行跟踪的结果,图1(a)为单纯采用颜色跟踪所达到的效果,图1(b)为本文算法所达到的效果,其中,绿色的椭圆形框表示算法输出的目标位置。从图中可以看出,在跟踪的过程中,单纯使用颜色的跟踪算法,椭圆形框一直都在目标中心摆动,到第120帧时,椭圆形框已经发生了漂移,而到第180帧时,漂移现象更严重。本文的算法由于利用了目标的颜色和结构特征融合来进行跟踪,两者互为补充,一直能够稳定地跟踪目标。
图1 汽车的跟踪实验
图2给出了文献[9]算法和本文算法在对飞机模型进行跟踪的结果,图2(a)为文献[9]算法的跟踪结果,图2(b)为本文算法的跟踪结果,其中,绿色的椭圆形框表示算法输出的目标位置。从图中可以看出,本文算法和文献[9]算法均能够稳定地跟踪目标,图2(c)给出了本文算法和文献[9]算法在每一帧中跟踪的误差,可以看出,本文算法在跟踪精度上与文献[9]算法相接近。图2(d)给出了这两种算法在跟踪过程中粒子数及消耗时间的变化情况,可以看出,本文算法可以在跟踪过程中自适应调整粒子数目,刚开始时,飞机模型所处的背景较为简单,在跟踪过程中所使用的粒子数比较少;从第15帧开始,由于有树木的干扰,加上人对飞机模型的遮挡,所以在跟踪过程中所使用的粒子数目开始增加;到第41帧时,飞机模型被人完全遮挡了,此时跟踪所使用的粒子数达到最大值;从第60帧开始,飞机模型再次运动到背景较为简单的区域,所以在此后跟踪过程中所使用的粒子数目开始逐渐下降。由表1可以看出,由于本文算法可以在跟踪过程中自适应调整粒子数目,因而本文算法与文献[9]算法相比,总体上降低了跟踪所花费的时间,提高了算法的实时性。
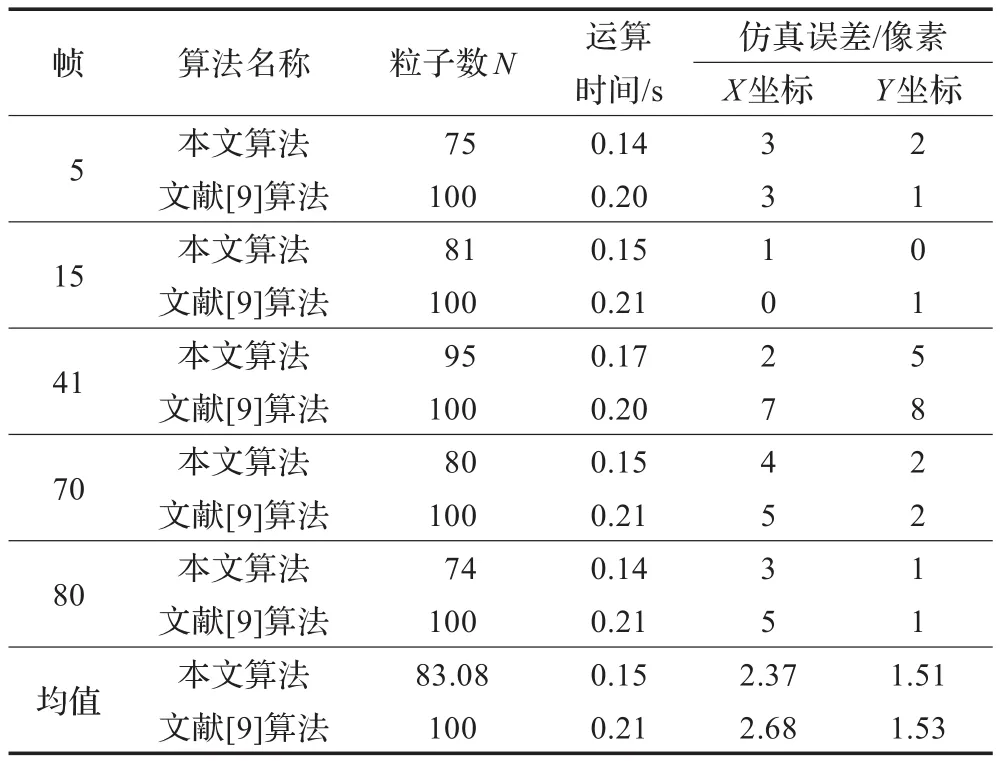
表1 图2所示两种算法跟踪过程中仿真数据的变化情况
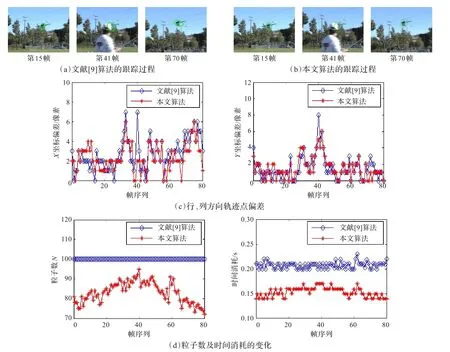
图2 飞机模型的跟踪实验
5 结束语
本文提出了一种基于多特征融合的自适应性粒子滤波跟踪算法,其特点是:利用颜色和结构特征表示目标,动态地更新这两种特征的融合系数,实现了复杂情形下的鲁棒跟踪;根据跟踪预测的准确程度自适应调整采样粒子数,总体上减少了用于跟踪目标的所需粒子数目,提高了算法的效率。实验结果验证了本文算法的优越性,该算法能够在保证跟踪精度的前提下,对目标进行快速跟踪。
[1]王欢,王江涛,任明武,等.一种鲁棒的多特征融合目标跟踪新算法[J].中国图象图形学报,2009,14(3):489-498.
[2]朱胜利.Mean Shift及相关算法在视频跟踪中的研究[D].杭州:浙江大学,2006.
[3]胡士强,敬忠良.粒子滤波原理及其应用[M].北京:科学出版社,2010:1-7.
[4]Yin Minhao,Zhang Jin,Sun Hongguang,et al.Multi-cuebased camShift guided particle filter tracking[J].Expert Systems with Application,2011,38:6313-6318.
[5]Han Zhenjun,Ye Qixiang,Jiao Jianbin.Combined feature evaluation for adaptive visual object tracking[J].Computer Vision and Image Understanding,2011,115:69-80.
[6]曾伟,朱桂斌,陈杰,等.多特征融合的鲁棒粒子跟踪算法[J].计算机应用,2010,30(3):643-645.
[7]李科,徐克虎,黄大山.改进的均值漂移和粒子滤波混合跟踪方法[J].计算机应用,2012,32(2):504-506.
[8]Peter D,Bogdan M.Choice of similarity measure,likelihood function and parameters for histogram based particle filter tracking in CCTV gray scale video[J].Image and Vision Computing,2011,29:178-189.
[9]张笑微,师改梅,周建雄,等.结合颜色和结构信息的粒子滤波跟踪算法[J].光电工程,2008,35(10):1-6.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
高技术通讯(2021年3期)2021-06-09
河北画报(2020年8期)2020-10-27
电测与仪表(2017年24期)2017-12-19
北京航空航天大学学报(2017年12期)2017-04-23
浙江大学学报(工学版)(2016年2期)2016-06-05
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
铁路通信信号工程技术(2014年5期)2014-02-28
电子设计工程(2014年20期)2014-02-27
