光伏发电逐日跟踪控制系统设计
2014-04-02 02:02:40,,,
中原工学院学报 2014年6期
, ,,
(中原工学院,郑州 450007)
近年来,新能源的发展为日趋严重的能源危机带来了曙光。光伏发电作为新能源利用方式之一,因其清洁环保、储量巨大、利用方便等优势而发展非常迅速。但其较低的光电转换效率和较高的开发成本却制约了光伏发电的可持续发展。为了提高光伏发电的光电转换效率,降低发电成本,本文利用太阳跟踪技术,设计了高精度的光伏发电跟踪控制器。所谓太阳跟踪技术就是使太阳能收集器表面法线依照太阳运动规律作相应运动,使太阳光入射角减小的技术[1]。
1 跟踪控制方法的优化
目前,光伏发电跟踪控制系统采用的跟踪方式主要有光电跟踪与视日运动轨迹跟踪。为了提高跟踪精度,人们更多地选择光电跟踪与视日运动轨迹跟踪相结合的跟踪控制方式[2]。在文献[3]中,系统可根据天气情况转换跟踪方式,晴天时采用光电跟踪方式,阴天时切换到视日运动轨迹跟踪方式。两种跟踪方式相互切换,可达到对太阳高精度跟踪的目的。在文献[4]中,系统采用两级混合跟踪,第一级采用视日运动轨迹跟踪,第二级采用光电跟踪。实际上,这种跟踪方法为滞后跟踪(正向跟踪时)或超前跟踪(反向跟踪时)[5],即电池板法线始终滞后或超前于太阳入射光线。这些跟踪方法虽然可以通过缩短跟踪时间间隔来提高太阳辐射利用率,但增加了系统的功耗和电机启动停止的频率,会减少电机本身的寿命[6]。为此,本文采用一种交错跟踪方式,在不增加系统功耗和电机启、停频率的条件下提高对太阳辐射能量的利用率。
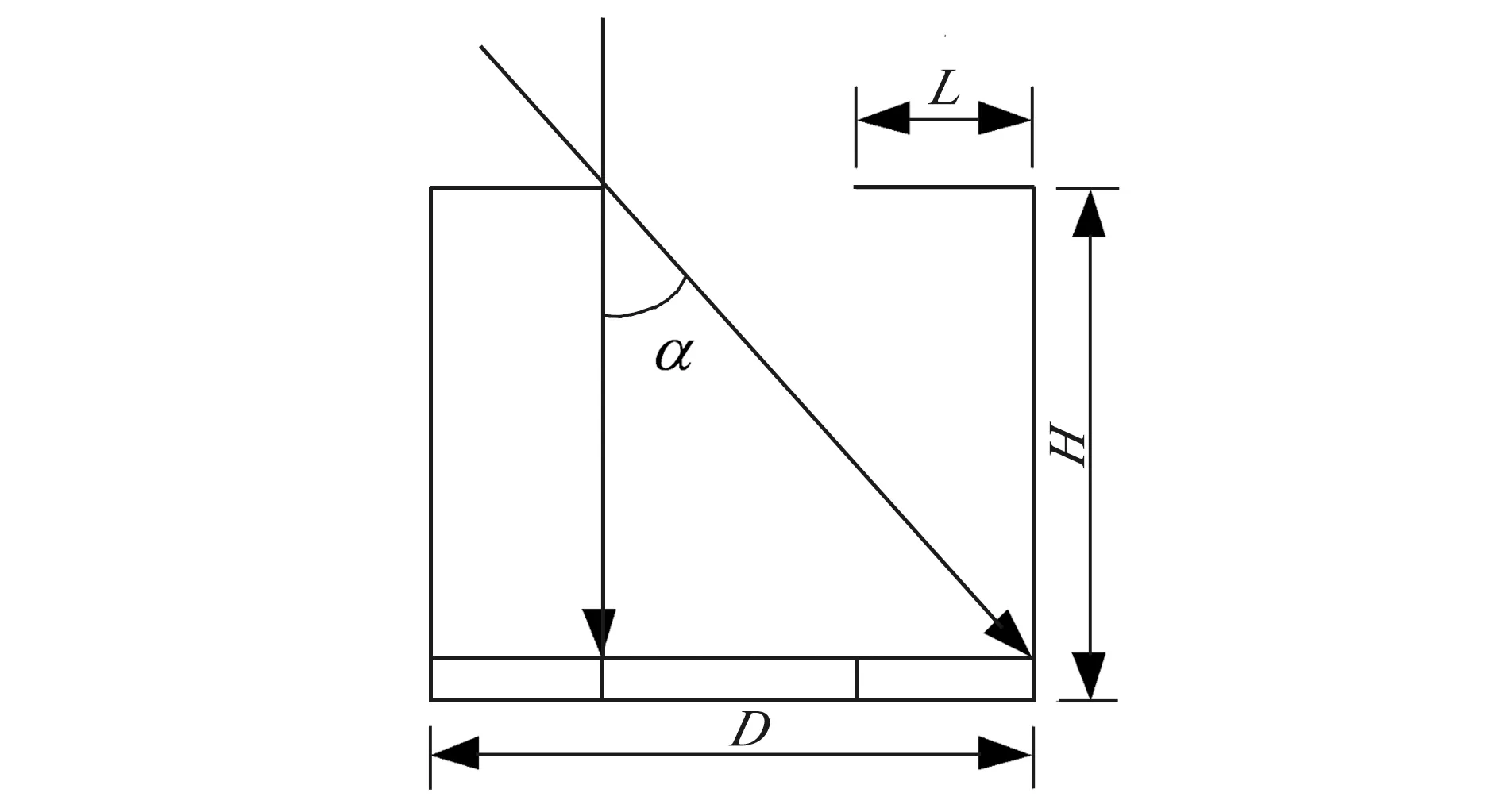
图1所示为跟踪模型图。在日地平均距离下,假设在A处太阳初始辐射强度为R0时电池板正对太阳光照射,为了方便计算,将某段时间内太阳辐射强度的变化视为线性变化,即R=R0+kt,其中k为线性系数,t为时间变量。在跟踪过程中,太阳光线随时间推移转动一个角度θ,则电池板法线方向上的太阳辐射强度为:
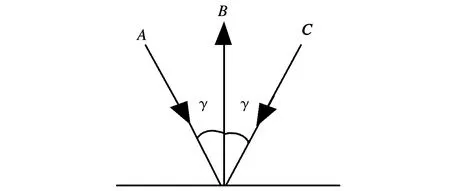
图1 跟踪模型图
Rn=(R0+kt)cosθ
(1)
将式(1)对时间进行积分,则可以计算电池板的太阳辐射能量:
(2)
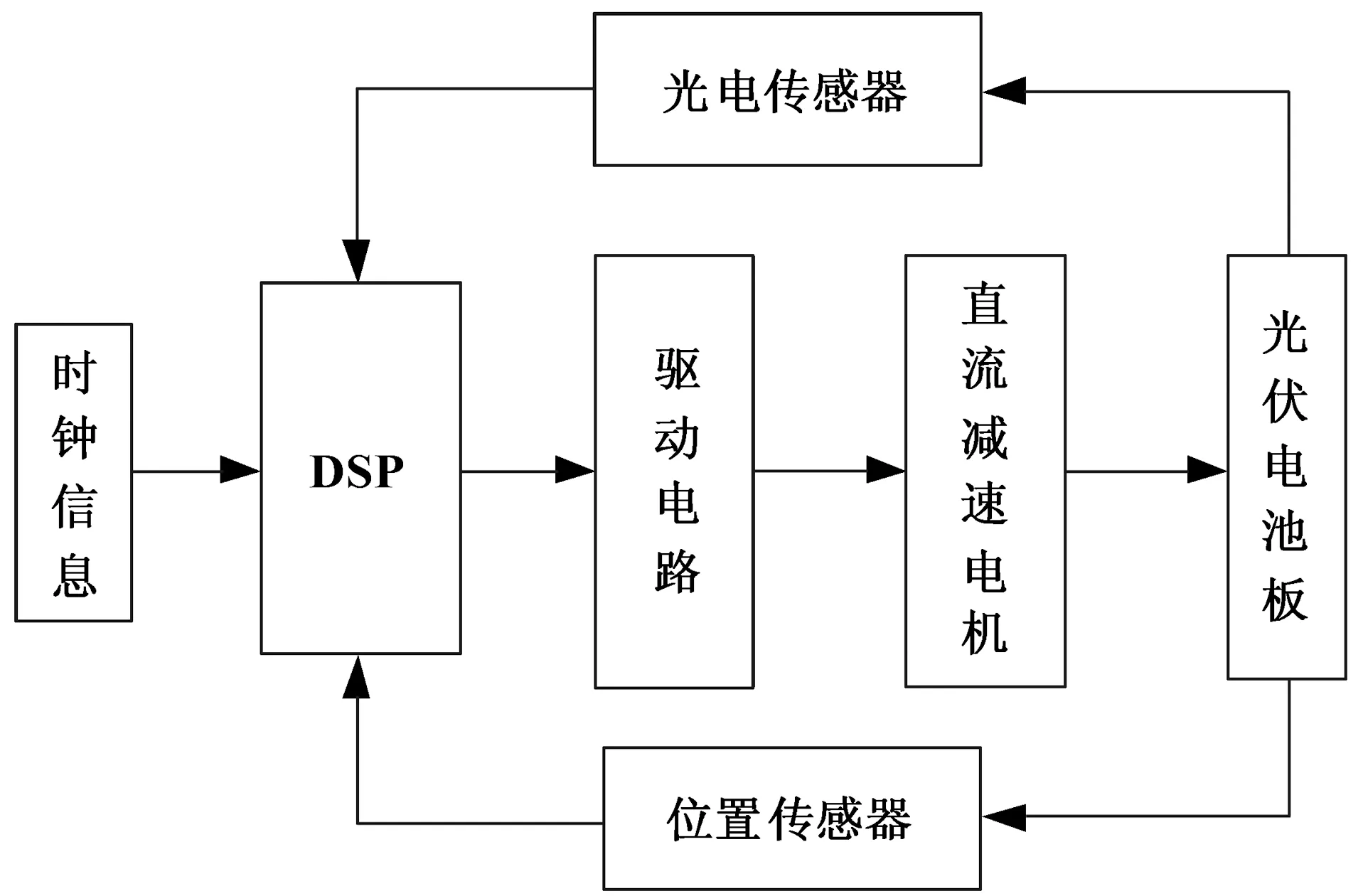
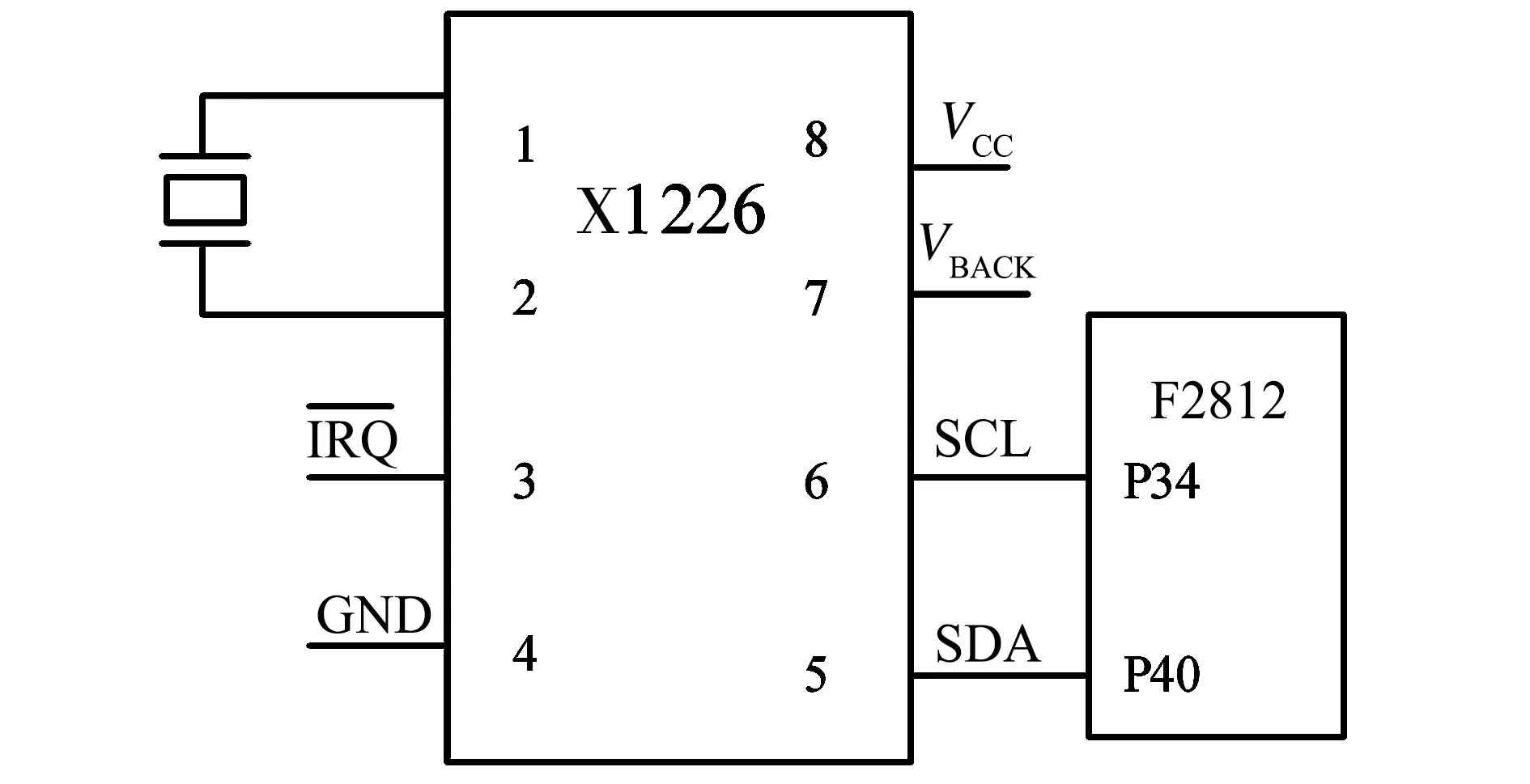
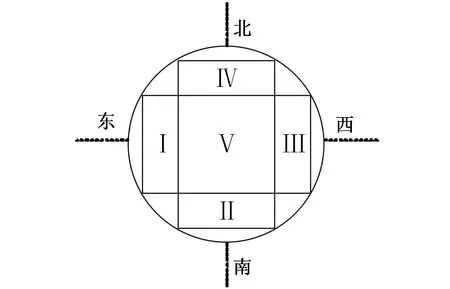
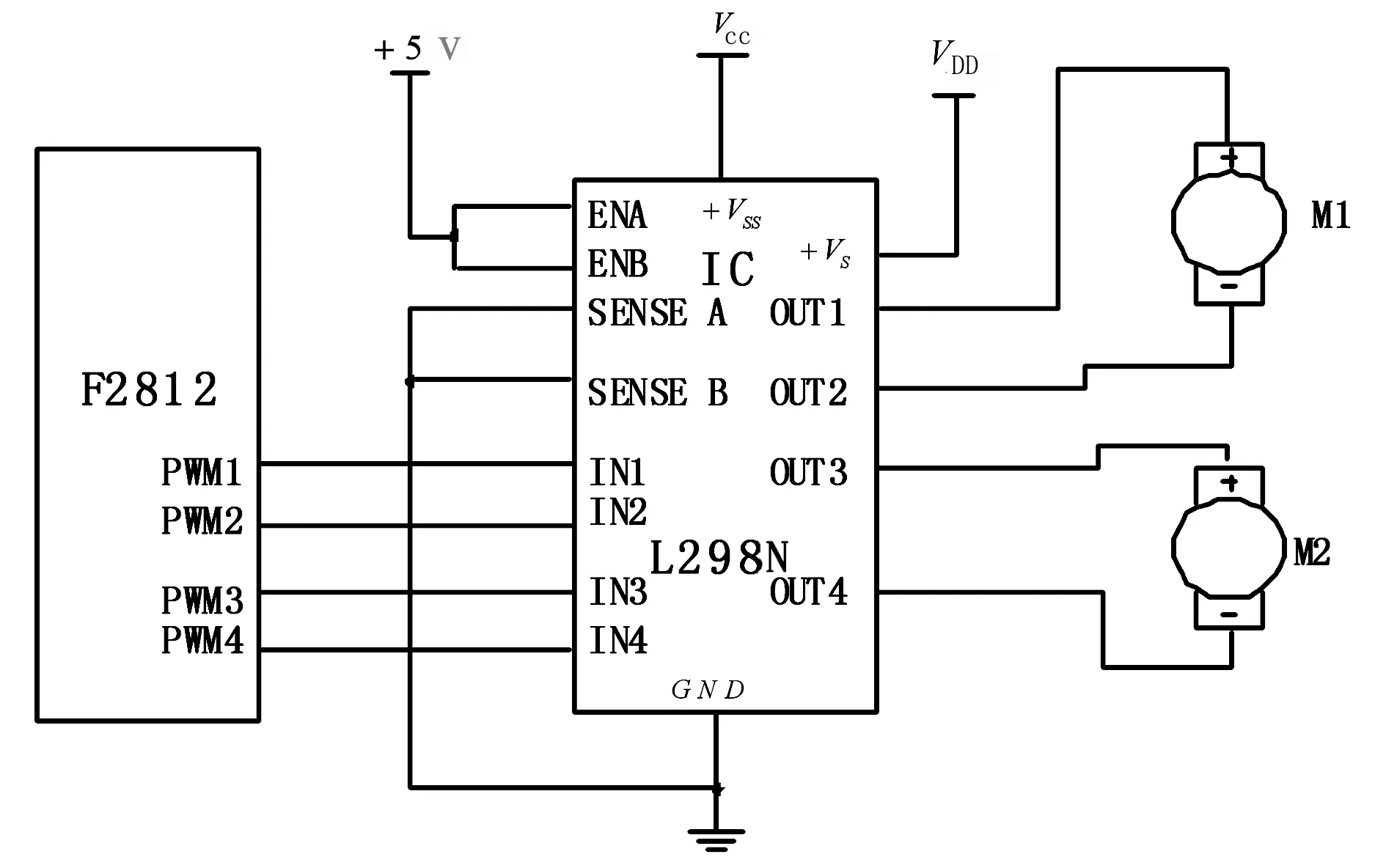
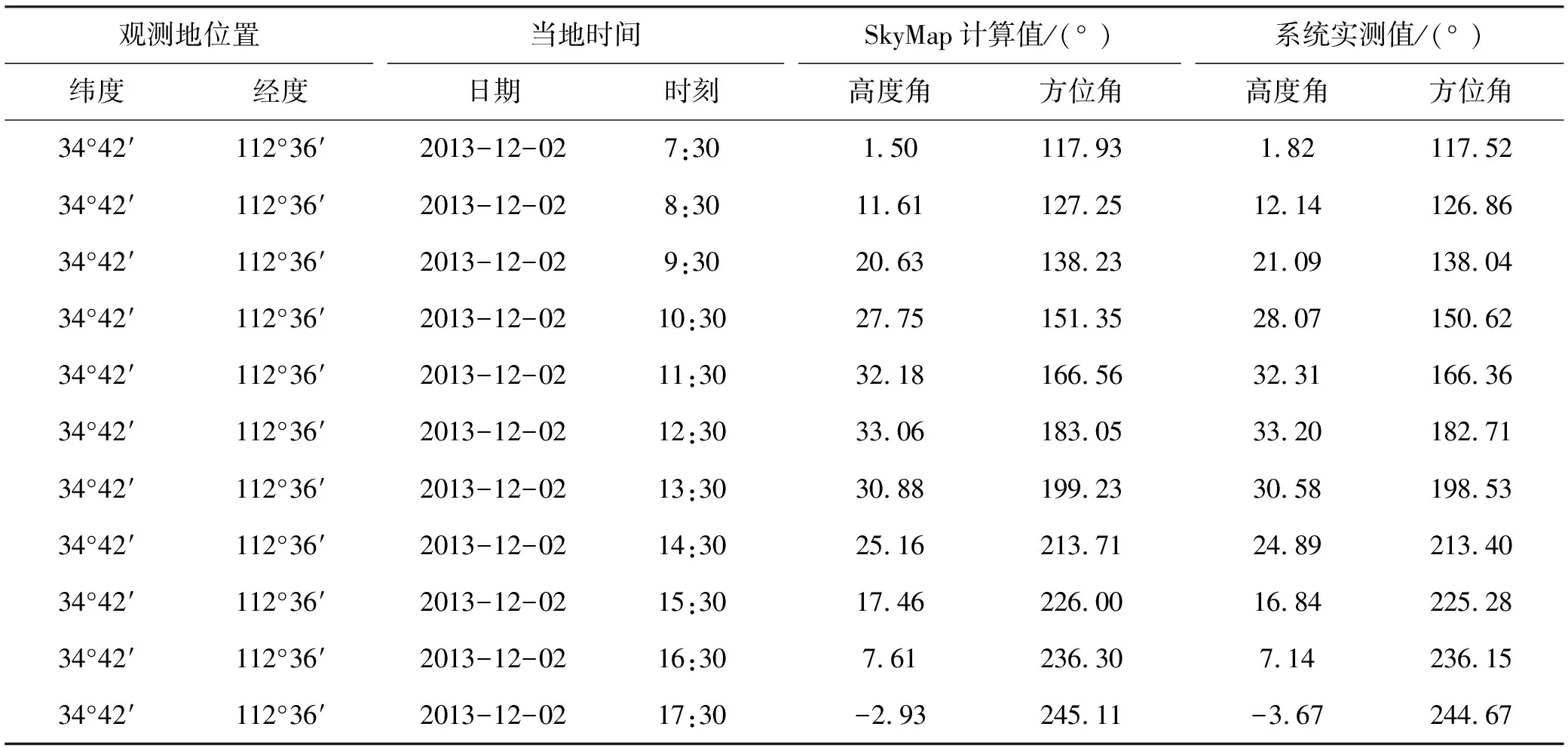
假设系统跟踪过程中太阳在tA时刻A处的运行位置与电池板重合,此时控制系统立即启动视日运动轨迹跟踪模式,让电机带动电池板旋转到tB时刻的B处,再等待跟踪时间间隔T,太阳运行到C处。在此过程中,太阳运行必定经过B处与电池板位置重合,完成一个周期跟踪调整。如此循环,实现全天自动跟踪太阳的目的。电池板法线与太阳入射光线的位置关系为超前、重合、滞后。若跟踪时间间隔0 系统主要由DSP控制器、时钟模块、光电检测模块、位置检测模块、驱动执行机构、太阳能电池板等部分组成。DSP作为整个控制系统的核心部分,负责运算和控制。时钟模块负责把全年每天的时间信息提供给DSP。光电检测模块包括光电探测器、调理电路、A/D转换电路等。位置检测模块包括光电编码器、正交编码电路等。驱动传动执行机构包括驱动电路和直流减速电机、传动机械装置等。图2所示为光伏发电逐日跟踪控制系统结构图。 图2 系统结构框图 光伏发电逐日跟踪控制系统采用视日运动轨迹跟踪和光电跟踪相结合的控制方式。与以往控制策略不同,本文优化了跟踪控制方式,即在跟踪时刻选择视日运动轨迹跟踪模式,调整电池板到滞后30 min时刻的位置,系统存储当前位置信息,等待30 min,启动光电跟踪模式,校正视日运动轨迹跟踪产生的误差。光电检测模块检测到位置信号的电压差值超过阈值时立即将此信号放大,经控制器分析处理后发出指令,驱动电机旋转,直至电压差值小于阈值,保证电池板精确跟踪太阳。再等待30 min后,进入下一次跟踪,如此循环,实现全天跟踪。 DSP控制器因其先进的软、硬件结构,且具有事件模块管理功能及快速中断处理功能,以及价格日趋降低等优势,而越来越成为一种极为方便地实现数字化控制的微处理器[7]。因此,本文选用合众达 SEED-DEC2812开发板作为光伏发电跟踪控制系统的核心。 3.1.1 时钟模块 合众达SEED-DEC2812开发板上配置有X1226实时时钟和512×8位的串行EEPROM,可以产生年、月、日、星期、时、分、秒等时间信息,采用串行IIC总线与微处理器接口,可以存储定值,非常适用于工业控制场合。X1226与F2812及晶振连接如图3所示。 图3 X1226与F2812及晶振连接图 3.1.2 光电检测模块 图4 光电探测器模型图 图5 光电探测器的侧视图 3.1.3 驱动执行机构 本文选用直流减速电机作为驱动执行机构,它内部的减速机构简化了系统机构设计,以L298N为控制芯片,驱动直流减速电机。L298N是双H桥高电压大电流功率集成电路,直接采用TTL逻辑电平控制,驱动电压可达46 V,直流电流总和可达4 A,内部有2个完全相同的PWM功率放大回路,两路输出可分别控制电机水平方向和俯仰方向旋转。直流电机的驱动电路如图6所示。 图6 直流电机驱动电路图 系统控制流程如图7所示。系统首先初始化相应模块,再读取当前时间,判断是否在跟踪时间范围(7:00-18:00)内。系统首次跟踪时刻在7:00时,选择视日运动轨迹跟踪方法让电机旋转到7:30时的位置,到7:30时再通过光电检测模块检测光强偏差是否超过阈值,若超过光强阈值,则启动光电跟踪,再休眠30 min,到8:00时进入下次跟踪。如此循环,到18:00时系统停止跟踪,实现全天自动跟踪太阳的目的。 图7 系统控制流程图 利用天文观测软件SkyMap计算郑州地区(东经112°36′,北纬34°42′)某天的太阳高度角和方位角数据,将其作为理论真值,与系统运行测试值对比。系统通过直流减速电机(减速比为1∶300)自带的光电编码器记录每次转过的角度。实验记录了2013年12月2日系统实际运行的数据,系统跟踪精度小于1°。表1为SkyMap计算值与系统实测值的数据对比。实验中还测试了固定式和跟踪式两种装置从7:30到17:30的采样光强大小。图8所示为固定式装置和跟踪式装置接收光强的对比图。从图8可以看出,跟踪式装置光强接近或超过500 W/m2的时间有6 h,比固定式多3 h,能够提高太阳辐射能量利用率。 表1 SkyMap计算值与系统实测值 图8 两种装置接收光照强度对比图 本文设计的光伏发电逐日跟踪控制系统晴天运行良好;短暂阴云天可以自动停止光电跟踪,只进行视日运动轨迹跟踪;长时间的阴雨天系统停止跟踪。它采用优化的跟踪控制方法,使电机停止启动次数减少,且提高了太阳辐射利用率。该系统设计简单,跟踪精度高,运行稳定可靠。 参考文献: [1] 李鹏,廖锦城,蔡兰兰,等.双轴太阳跟踪系统运动控制规律的研究[J].机械制造,2010,48(6):23-26. [2] 王尚文,高伟,黄树红,等.混合双轴太阳自动跟踪装置的研究[J].可再生能源,2007,25(6):10-13. [3] 侯长来.太阳跟踪装置的双模式控制系统[J].可再生能源,2010,28(1):89-92. [4] 冯作全,贺成柱.基于TMS320F2812 DSP的定日镜跟踪控制系统的设计[J].机械研究与应用,2012(4): 164-168. [5] 彭春明.基于嵌入式的光伏发电自动跟踪控制系统设计[D].南京:南京理工大学,2012. [6] 常玲.步进电机启动频率对太阳能发电系统效率影响[J].电子科技,2012,25(6):142-148. [7] 杨志成,柳浩,孔翔斌,等.基于DSP的太阳能跟踪控制系统研究[J].计算技术与自动化,2011,30(2):38-41.2 系统结构及工作原理
2.1 系统结构组成
2.2 系统工作原理
3 系统设计
3.1 硬件设计
3.2 软件设计

4 实验和分析

5 结 语
猜你喜欢
环球时报(2022-06-15)2022-06-15 15:21:32
军事文摘(2021年18期)2021-12-02 01:28:16
科学大众(2021年9期)2021-07-16 07:02:50
新能源科技(2021年8期)2021-04-02 19:39:55
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
现代装饰(2018年5期)2018-05-26 09:09:39
知识就是力量(2017年12期)2018-01-15 10:57:23
下一代英才(酷炫少年)(2017年3期)2017-06-15 13:00:06
中国三峡(2017年2期)2017-06-09 08:15:29