
基于ADAMS的油菜割晒机运动仿真设计*
2014-03-27 00:16:42颜伊芸李旭荣
机械研究与应用 2014年3期
颜伊芸,李旭荣
(华中农业大学工学院,湖北武汉 430070)
0 引言
目前中国油菜机械化收获的水平不足6%,油菜的机械化收获问题亟需解决。当前中国油菜大多茎秆粗壮、植株肥大,联合收获性能不佳。油菜主要种植于长江中下游地区,大多田块较小,套种较多,不适合国外进口的昂贵的大型油菜收割机作业,因此损失率低、成本廉价、作业灵活的分段收获机是现阶段我国解决油菜机械化收获的重点研究之一,而目前我国尚未有适用于油菜的分段收割机的成熟机型出现。针对长江中下游地区油菜种植栽培的特点,需要设计一款油菜割晒机,笔者利用ADAMS软件进行了一款油菜晒割机的虚拟样机设计,并进行动态仿真,验证该机器是否达到设计要求。
1 机械运动原理
如图1,油菜割晒机主要由机架、传动装置、分禾器、扶禾器、切割装置和输送系统组成。割晒机工作时,被动分禾器将油菜茎秆分行,上部缠绕的枝杈在置于割晒机两侧的主动分禾器的作用下被剪断,剪断的枝杈落入割台,完成油菜茎秆分禾。被分禾后两侧的油菜茎秆和中间的油菜茎秆,一起到达切割位置,在扶禾器扶持下被切割装置切断;在切割装置两侧被切断的茎秆被输送系统的进料滚筒推向进料口,实现茎秆横向集中输送;被切断的油菜茎秆在输送系统的伸缩滚筒作用下,被扒指拨至输送带,输送带纵向运动,将油菜茎秆集中纵向输送到后部,并以纵向条形放铺田间,从而完成了整个油菜收割过程。
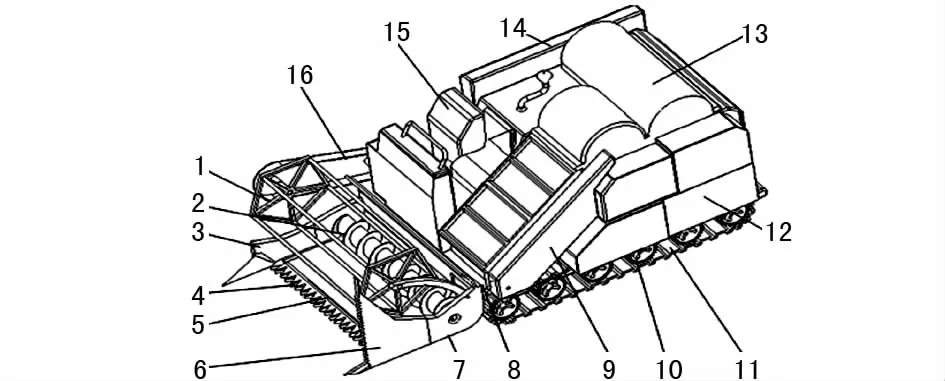
图1 油菜割晒机主要结构
2 割晒机样机建模
2.1 启动ADAMS/View
在欢迎对话框中选择新建模型,在模型名称输入框中输入geshaiji,将单位设置成MMKS。
2.2 设置工作环境
单击菜单【Settings】→【Working Grid】,设置如下,将方向(Set Orientation)设置为Global XY,Size X =1000,Y=700,Spacing X=50,Y=50,单击OK,调整视图,单击F4,打开坐标窗口。
2.3 用Pro/E创建实体
鉴于ADAMS中的实体创建功能有限,且操作不方便,因此大部分较复杂的实体都是在Pro/E中进行创建的。之后再把它们导入到ADAMS中进行仿真。图2为切割系统的主要部件外形图与主要尺寸。
图2 切割系统主要部件
2.4 将Pro/E模型导入ADAMS
(1)将在Pro/E中创建的实体另存为x_t文件,然后导入到ADAMS中,并将割晒机各部件按装配位置放好。油菜割晒机的各部件是在Pro/E中绘制的,导入ADAMS后没有质量也没有颜色,需及时修改颜色和材料,并重新命名,调整好各部件的位置后,要巧妙的利用布尔加减运算将某些部件连接起来。
(5)由于Pro/E中的螺纹副在ADAMS中无法显示,所以进料轮在ADAMS中用带孔的圆柱替代,具体操作如下:单击零件库中的图标,设置其radius为3.5 cm,选择合适的首位坐标使其length为50 cm。使用命令,在进料轮上打一排radius为1 cm的圆孔。
(6)修改其他部件材料和颜色属性,并依次重命名,其中keti中的solid15:appearance/transparency修改为50。
油菜割晒机的整体装配效果如图3所示。
3 添加约束
模型中的约束很多,注意约束添加的数量要合理,不能造成过约束。在建立约束添加动力时要精确计算,以免模型无法仿真。另外,注意细节,某些函数的使用、利用general motion来控制割晒机的前进路线等;添加旋转约束,选择约束点很重要,如果是normal to grid时连接方向默认垂直于栅格平面,这时要注意调整栅格平面,已达到需求的效果,如果是pick geometry feature,则要注意选择方向。
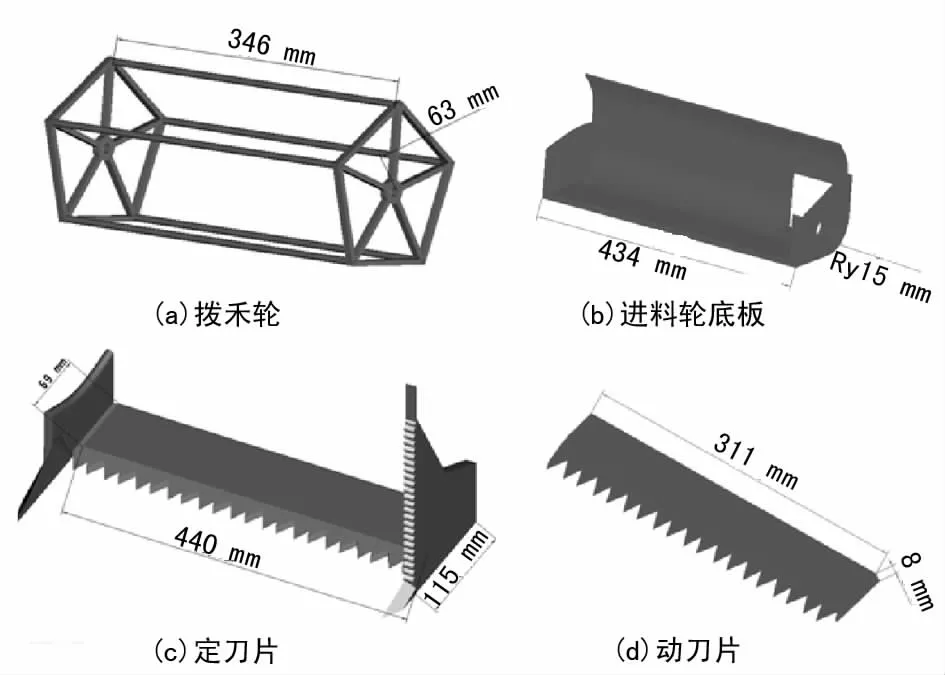
图3 油菜割晒机整体效果
(4)在约束上添加impose motion,选择要修改的约束,右键modify/impose motion,将free改为disp,点击进入function builder,输入函数。需要添加impose motion的约束,及其驱动力函数为:
①挂接架与壳体之间的驱动力函数
JOINT_zhaoban:step(time,0,0d,1,-10d)+step (time,1,0d,2,20d)+step(time,10,0d,11,-20d)+ step(time,13,0d,14,20d)+step(time,28,0d,29,-20d)+step(time,31,0d,32,20d)
②拨禾轮以及滚筒的驱动力函数
JOINT_bohelun1,JOINT_bohelun2,JOINT_guntong:45d*time
③进料皮带轮的驱动力函数
JOINT_pidailun1:-30.0d* time
④液压杆的驱动力函数
JOINT_dinggan2:step(time,11,0d,13,-5d)+step (time,13,0d,14,5d)+step(time,29,0d,31,-5d)+ step(time,31,0d,32,5d)
⑤机架相对地面的驱动力函数
Jijia:step(time,11,0d,13,180d)+step(time,29,0d,31,180d)
⑥动刀片相对定刀片的驱动力函数
JOINT_daopian:15*sin(20*PI*time)
4 添加驱动力
4.1 转动副驱动力的添加
4.1.1 给机器车轮添加旋转驱动力
4.1.2 给进料皮带轮添加驱动力
4.2 添加general motion以设计割晒机移动路线
其中Tra X方向上的函数修改为:
step(time,2,0,10,-1500)+step(time,14,0,28,3000)+step(time,32,0,40,-1500);
Tra Y方向上的函数修改为:
step(time,11,0,13,150)+step(time,29,0,31,150)
5 仿真分析
5.1 整车前进的X、Y、Z轴及合成位移分析
由图4所示各位移曲线可看出割晒机在田间来回运动进行收割,在Z轴方向的移动是控制割晒机呈S型路线来回收割。
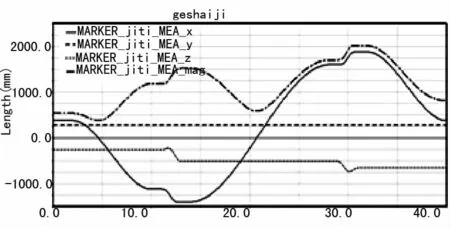
图4 整车前进的X/Y/Z方向与合成位移
由图5所示割台与拔禾轮角度曲线变化图可见,割台与拨禾轮之间的角度是呈周期性变化的,并伴有一定的震动。
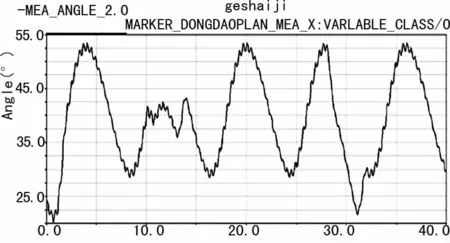
图5 割台与拨禾轮的角度分析
5.2 动刀片的位移分析
由图6所示动刀片的运动曲线可见,动刀片相对定刀片的快速来回运动以实现割断油菜茎秆。符合设计的要求。
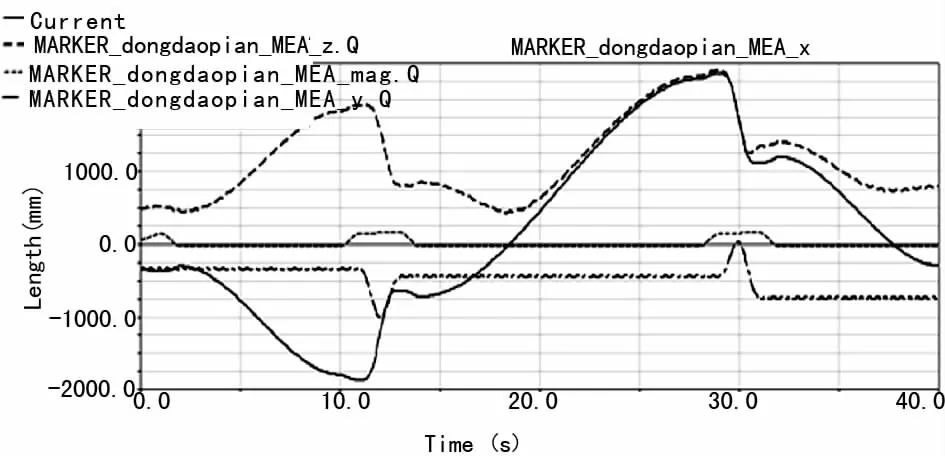
图6 动刀片的各方向位移
6 结语
利用Pro/E和ADAMS联合应用实现对油菜割晒机的建模与运动仿真,主要实现油菜割晒机在田间工作时的来回运动与掉头,刀片的快速切割运动,拨禾轮和滚筒的配合运动使油菜进入进料口。从而验证了设计机构在机械原理部分的正确性,为更进一步详细设计提供了理论依据。
[1] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2007.
[2] 程友联.机械原理[M].北京:中国农业出版社,2008.
[3] 周俊华.基于虚拟样机的乒乓球发球机动态仿真[J].机械研究与应用,2013(6):83-83.
猜你喜欢
科学大众·小诺贝尔(低幼)(2024年2期)2024-12-31 00:00:00
重型机械(2020年3期)2020-08-24 08:31:42
中国外汇(2019年9期)2019-07-13 05:46:30
农业机械学报(2019年4期)2019-04-29 02:20:48
家庭影院技术(2018年9期)2018-11-02 05:31:30
制造技术与机床(2018年10期)2018-10-13 06:36:54
畜牧与饲料科学(2018年5期)2018-06-13 12:03:48
现代企业文化(2018年13期)2018-06-09 08:22:15
家庭影院技术(2018年3期)2018-05-09 07:06:17
工业设计(2016年4期)2016-05-04 04:00:26
