
激光致声探测水下目标分析
2014-03-26 00:37:34曹博文严一民
实验技术与管理 2014年6期
曹博文,龚 杭,汲 壮,严一民
(电子科技大学 物理电子学院,四川 成都 610054)
当前世界各国普遍使用吊放声呐的方法来对水下目标进行遥感,这种方式不但失去了机动性和灵活性,而且还破坏了对被测目标探测的连续性,甚至有失掉目标的危险。激光致声效应探测水下目标的设备均不与水接触,只要将设备搭建在直升机上便可以高效地连续地对目标进行探测,而且也允许直升机在行进中进行水下探测,具有很大的机动性、灵活性和快速性,因此更不易丢失目标。1980年美国的G.D.Hickman及其同事用能量为5 J的CO2激光器测出的水深达20 m。除此外,根据文献查询有关探测水深目标的一些数据没有太多的记载。因此对这项技术进一步跟踪和探索很有必要。
利用激光致声来探测水下目标有3个特点:一是它能在水中很远的距离生成声波;二是只要激光强度够强,它能产生的声波强度就会很强;三是产生的声波是窄脉冲宽频信号,这对远距探测具有很重要的实用意义[1-2]。
激光声遥感技术涉及的主要理论为激光致声、声波在不同介质的传播以及信号处理方法等。
1 激光致声基本原理
激光致声是指大能量红外脉冲激光打在水面上与水相互作用而在水中产生声波。根据激光脉冲能量大小和相互作用区内能量密度及其时空分布,可以把激光辐射与水相互作用产生声波的机制归纳为热膨胀、汽化和介电击穿。由于激光强度不够,本文实验时的致声方式为热膨胀致声。
1.1 热膨胀致声
当激光脉冲能量较小、相互作用区的能量密度较低、水表面加热达不到沸点温度时,声波的产生是由于水的不均匀加热所引起的热弹性压力,此时声激发的机制是热膨胀。热膨胀机制产生的声压强p可表示为[3]
(1)
式中,α为水的吸收系数,c1为水中声速,E0为表面处的热能密度,av为水的膨胀系数,cp是水的比热容。
水对不同波长的激光有着不同的吸收能力,如图1[3]所示,消光长度越短说明吸收能力越强。热膨胀致声对实验设备要求低,但产生声信号微弱。
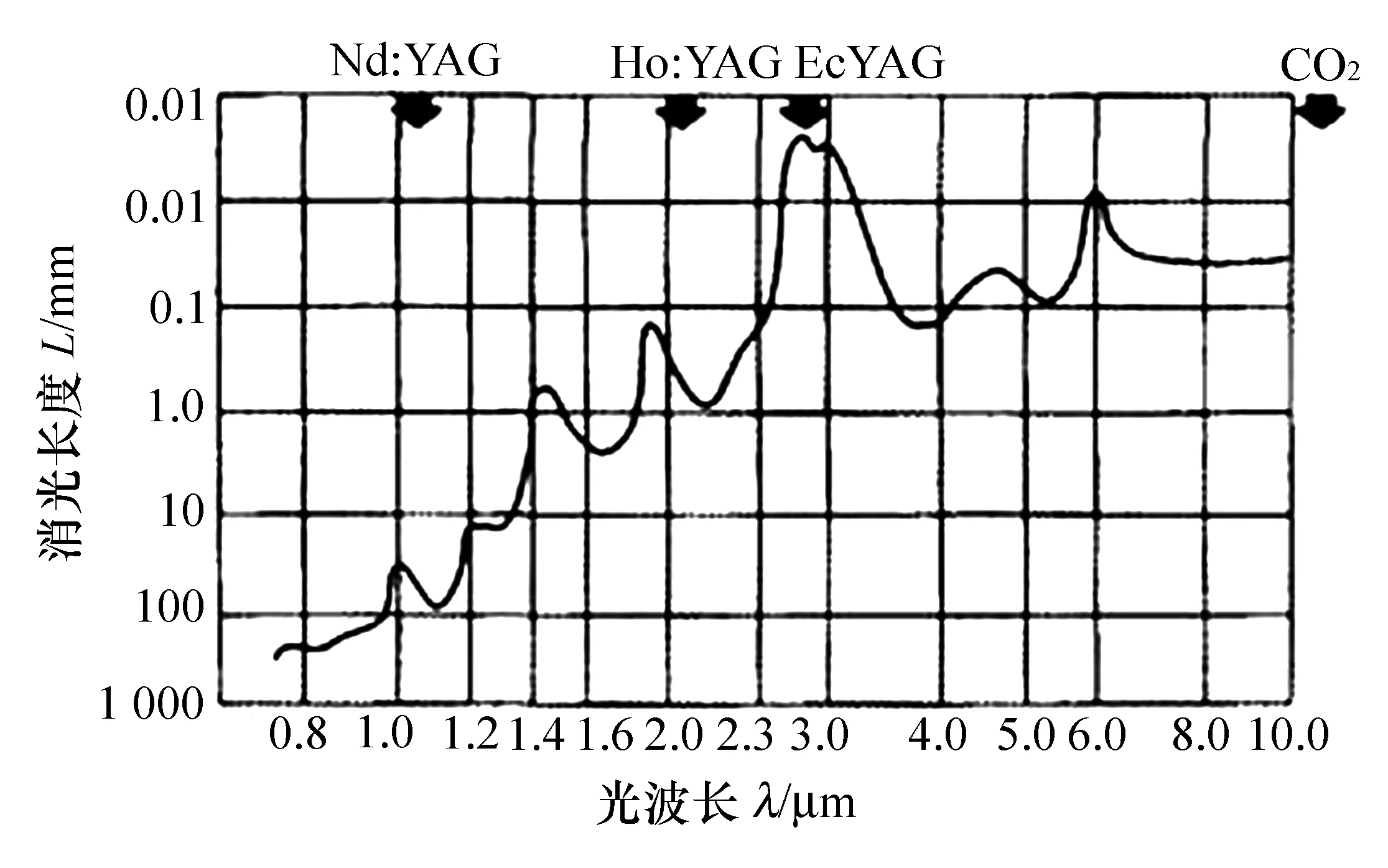
图1 水消光长度与声波长关系
1.2 汽化致声
当光脉冲能量增大,使水面局部温度达到水的沸点时就产生汽化致声。若水的初试温度为T0,则达到沸点所需能量E为[3]
(2)
其中ρ为水的密度,Tboil为水的沸点,α为水的吸收系数。
相比热膨胀致声,这种致声方式更为有效,但对激光强度要求更高。
1.3 介电击穿致声
当激光功率达到水的介电击穿阈值(约107W/cm2)时,会发生水的光学击穿。这时水的分子离解,形成等离子体,于是水与激光的作用变成了等离子体与光的作用。介电击穿致声产生的压力可以近似地用球形炸药水中爆炸半经验公式表示。这种致声方式致声效果最好,但对器件的要求也最高。
2 声波的传播
2.1 激光致声声波特性
由于激光击水点面积很小,故可以把波源看成是点波源,产生的声波为球面波,一部分往空气中传播,另一部分向水中传播。从频谱看,该声波是几Hz到300kHz的宽频波,其中在频率0~20kHz和40kHz、75kHz、100kHz上强度最大。但由于在0~20kHz时环境噪声大,同时高频分量在水中衰减快,因此在实际应用中常使用25kHz~40kHz的分量。
2.2 声波在水和空气中的传播
声波在非理想媒质中传播时,会随着距离的增加而逐渐衰减,产生声能转变为热能的耗散过程,这就称为媒质中的声衰减。引起媒质对声波吸收的原因很多,在纯媒质中产生声吸收的原因是媒质的黏滞、热传导以及弛豫效应等。在非纯媒质中,由于媒质中的悬浮微粒对媒质做相对运动的摩擦损耗,及声波对粒子的散射而引起附加的能量耗散[4-5]。
与纯水相比,海水中的声吸收非常大。在海水中,声吸收是由3种效应引起的:一种是切变黏滞性效应,二是体积黏滞性,三是在声波频率低于100kHz以下时,海水吸收的主要原因是硫酸镁分子的离子弛豫[6]。考虑以上因素,声波在海水中的衰减系数[6]1为:
(3)
声波在空气中传播时,衰减与湿度有关,当湿度较大时衰减系数约为[3]
(4)
在水底反射和水面透射时也会产生衰减。在水底,衰减与水底介质有关,在泥沙底时反射衰减为6dB~10dB。在水面透射时,衰减与入射角有关,在入射角小于50°时衰减约为30dB,但入射角大于70°时,衰减急剧增大,70°时衰减为40dB,而入射角接近90°时,衰减达到100多dB[1]。
3 实验与仿真
3.1 实验仪器
实验仪器:水槽(深度30cm)、大功率激光器、数字示波器(带存储功能)、U盘、放大器、铁架台、金镜、微音器。
在本实验中共使用了两种型号的微音器,分别为NU40A25TR-1和NU23A25T/R-1,前者中心频率为40kHz,后者为23kHz。同时,选择了100W的CO2激光器作为实验的激光源。首先气体激光器的最大优点是单色性、方向性都比其他激光器要好。而CO2激光器是一种比较重要的气体激光器,它具有以下几个突出优点:功率大,能量转换效率高,一般的CO2激光器可以做到几十瓦的连续输出功率[7-8];CO2激光器能量密度大、功率高、波长长、工作稳定,是激光致声的首选激光源。示波器使用的是LDS20205数字示波器。数字存储示波器具有存储信息功能,能对单次瞬变过程、非周期现象、低复频率信号进行观测[9]。
3.2 实验方案
图2为实验仪器示意图。调整光路,使激光打在水槽一侧的水中,数字示波器开启存储功能后,打开激光器使激光经金镜反射射至水面,然后用微音器接收声波信号,并将声信号转换成电信号传递给放大器,将放大后的信号用数字示波器存至U盘。在实验仪器布置时,微音器的位置应满足一定要求,即使水下反射信号先到达微音器,以免防止此信号被更强的水面信号覆盖。合适的微音器坐标可以由仿真实验得出。
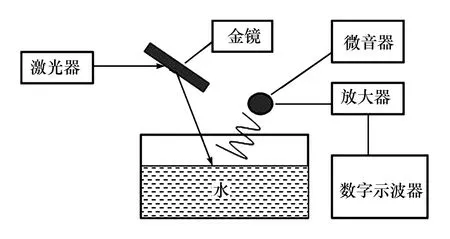
图2 实验装置原理示意图
3.3 仿真与分析
用Matlab编写程序[10-12],求出在不同接收点时,从水面传来的信号与经水底反射信号到达微音器的时间差。仿真结果如图3所示,其中x和y分别表示微音器的横坐标和纵坐标,△t表示水底反射信号和水面信号到达的时间差。当Δt<0时代表水底反射信号先达到微音器。这里假定水深实际深度为5m。在实际实验时,水深是一个需要测定的量。
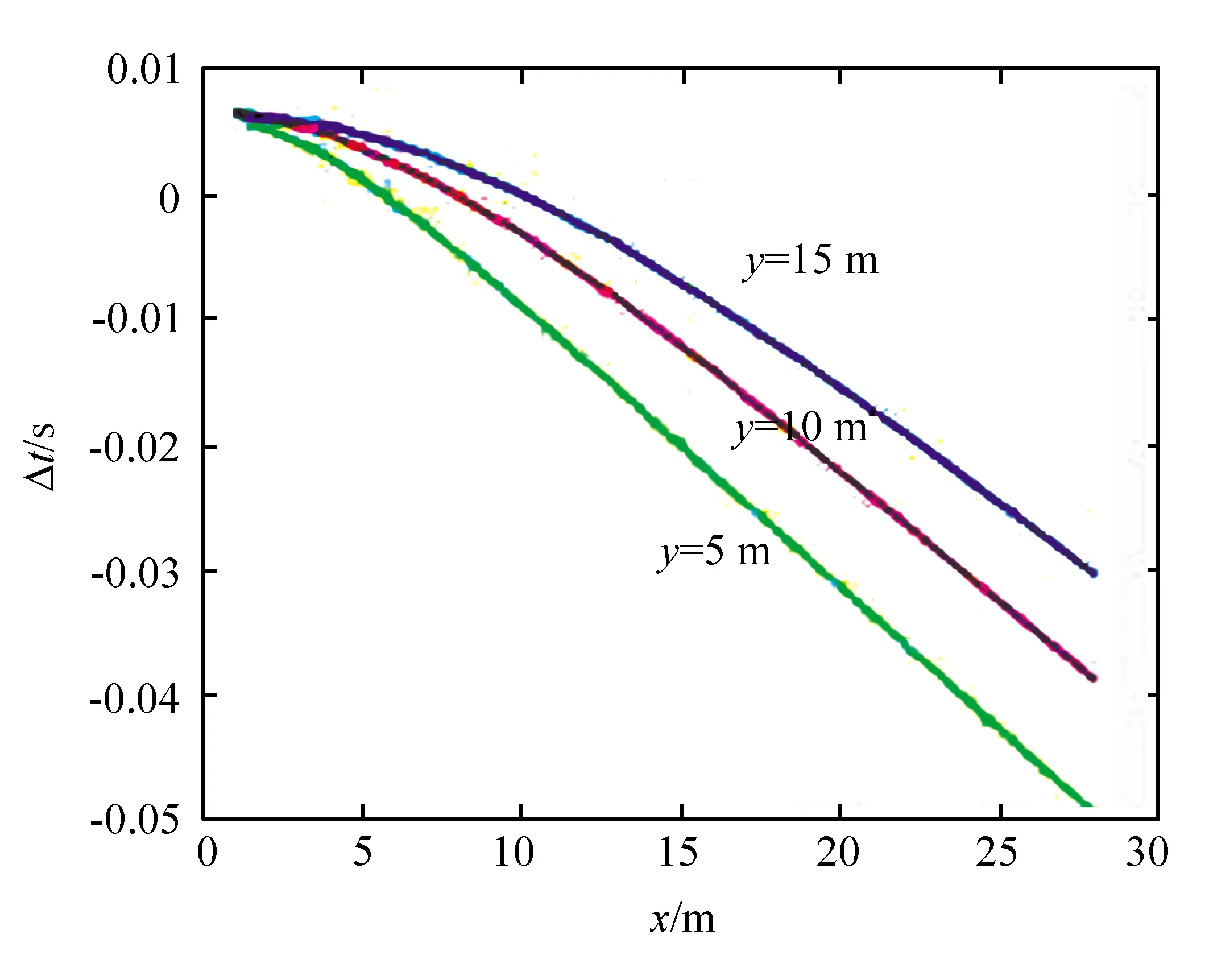
图3 不同接收点信号达到时间差
3.4 数据处理
在接收到信号后,根据信号时间差即可计算出水底深度。设d代表水深,a表示水底反射信号经反射到达水面时的距离,如图4所示。a和d是未知量,v1和v2分别表示声波在空气与水中的速度,图4中(0,0)表示激光入射点。
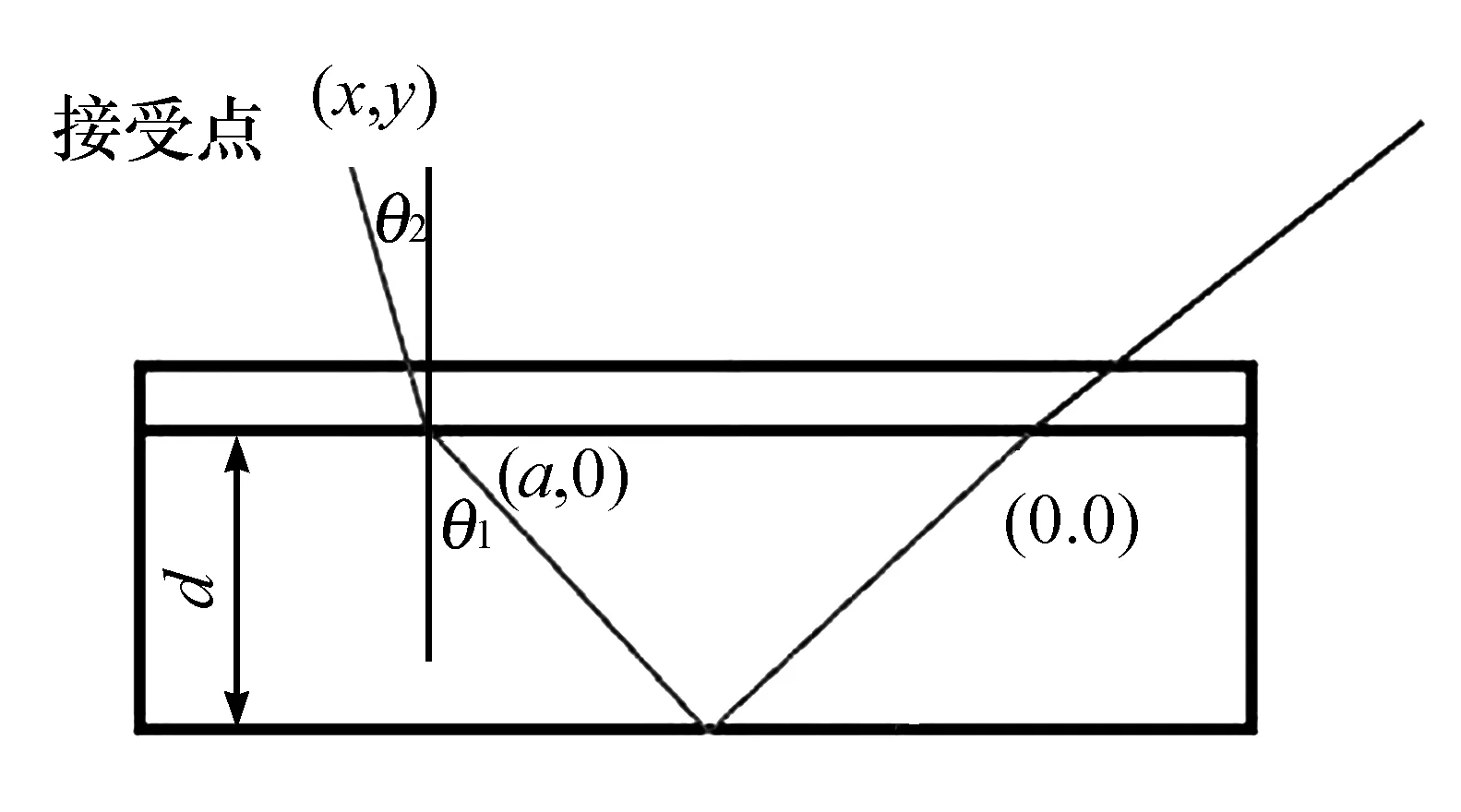
图4 激光入射点
水底反射信号与水面信号到达微音器的时间差为
(5)
设:
(6)
(7)
(8)
式中θ1、θ2分别是声波在水与空气中的折射角。(6)~(8)式代表折射定理。但由于(5)~(8)计算结果有多组。这时就需要考虑声信号在水与空气中的传播问题,根据接收信号的强度筛选出真实解。
3.5 实验与分析
在实验时用2个微音器都在水面接收到了声波信号。使用NU23A25T/R-1微音器时信号更强,虽然这只微音器的灵敏度为-65dB,但输出电压约为8~9mV;而灵敏度更高的-90dB的NU40A25TR-1微音器输出约为2mV。但由于23kHz工作频率较低,NU23A25T/R-1微音器噪声比NU40A25TR-1微音器的更大。图5和图6是实验获取的波形。图中通道1为NU23A25TR-1的输出电平,通道2为NU40A25TR-1的输出电平。
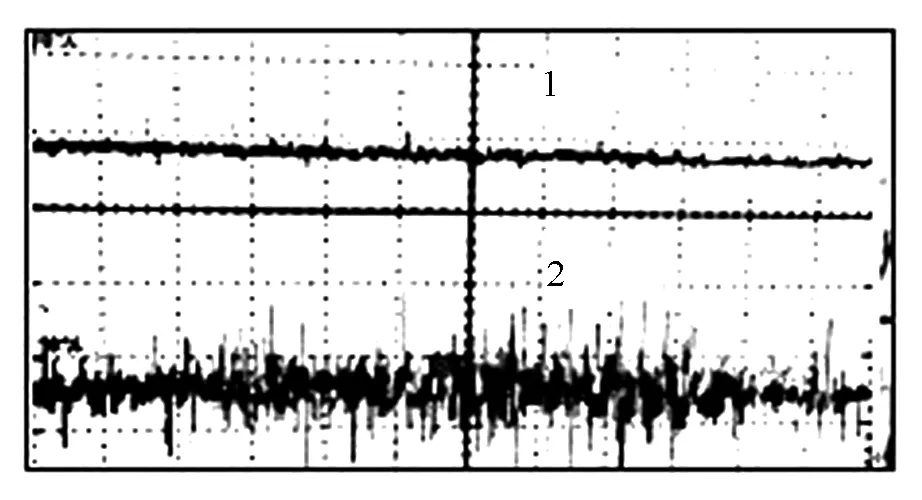
图5 激光入射前的示波器显示的噪声波形
微音器成功地接收到了声波信号,若是使用阵列式微音器并同时提高单个微音器的灵敏度,信号的接受强度将更强,能接收到信号的范围也就越广,能检测的水下目标也将更深。
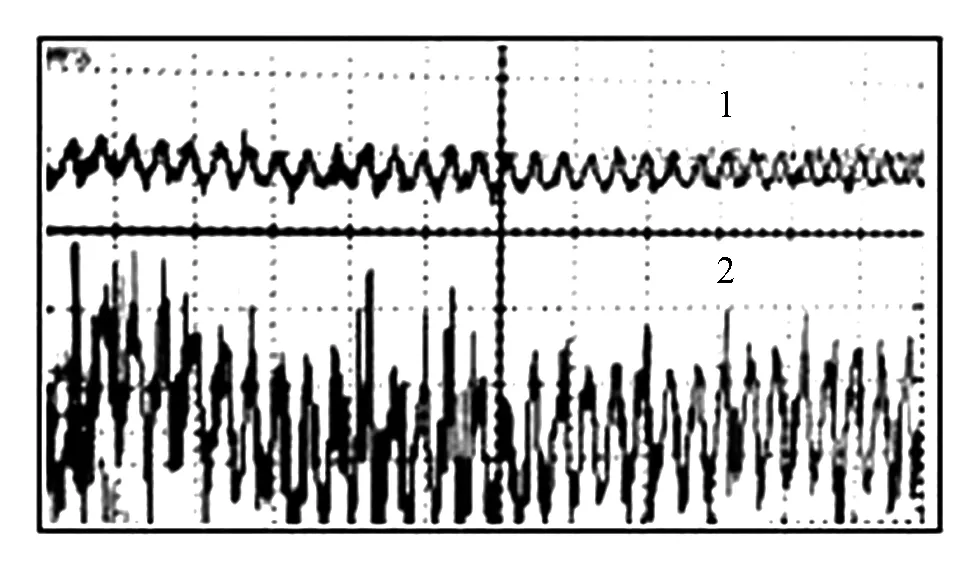
图6 接受信号示波器显示的波形
然而由于实验条件所限,在本次实验时,我们并没能从接受到的信号中区分出水面传来的声波与水底反射上来的声波。这是由几个原因造成的。第一,实验空间过小,不能有效地把两个信号区分开,导致水底反射信号被更强的水面信号覆盖,从仿真也可以看出,接收点与击水点相近时,两个信号的时间间隔十分小,且水面信号会先到达微音器;第二,本次实验使用的是单个微音器,接收效果不及阵列式设计的微音器,同时微音器的接收灵敏度也有待提高。
4 结束语
激光声遥感技术是项新兴的技术,然而在国内外该项技术都远未得到普遍和广泛使用。此课题在研究过程中通过实验与仿真,得到了水下深度与声波传播时间差的关系曲线、及理论计算方法,因此可进一步分析和研究它的应用价值,同时加深并理解激光遥感技术对水下目标探测方面的物理意义。由于受到实验设备条件限制,不可能获得一个较优质的结果,其主要因素是信号微弱、环境噪声大、微音器的灵敏度达不到设计要求等,这些缺陷的改进需要极高精度的微音器、滤波器和放大器。
[1] Xiong Xianming,Wu Zaiqun,Yang Surong.Study of Laser Induced Acoustic Waves in Water Based on Interferometry[C]//2010 International Conference on Intelligent Computing and Integrated system.Guilin,China,2010.
[2] Tian Zuoxi,Geng Song,Liu Yanqiong.Laser induced acoustic waves in water[J].Laser&Optoelectronics Progress,2004(41):15-19.
[3] 李福荣,崔桂华,田作喜,等.激光声遥感技术[M].北京:国防工业出版社,2003.
[4] 杜功焕,朱哲民,龚秀芬.声学基础[M].南京:南京大学出版社,2001.
[5] Morsse P M,Ingard K U.理论声学[M].吕如榆,杨训仁,译.北京:科学出版社,1984.
[6] 尤立克 R J.水声原理[M].洪申,译.哈尔滨:哈尔滨船舶工程学院出版社,1990.
[7] 俞宽新.激光原理与激光技术[M].北京:北京工业大学出版社,2008.
[8] 赵凯华.光学[M].北京:高等教育出版社,2004.
[9] 崔红玲.电子技术基础实验[M].成都:电子科技大学出版社,2008.
[10] 罗华飞.MATLAB GUI设计学习手记[M].北京:北京航空航天大学出版社,2011.
[11] 原思聪.MATLAB语言与应用技术[M].北京:国防工业出版社,2011.
[12] 徐全智,杨晋浩.数学建模[M].北京:高等教育出版社,2003.
猜你喜欢
大学物理(2021年9期)2021-09-16 12:57:50
电气电子教学学报(2021年1期)2021-04-02 03:32:06
少年博览·小学低年级(2020年11期)2020-12-14 04:12:15
渭南师范学院学报(2018年24期)2019-01-07 09:02:52
小朋友·快乐手工(2018年9期)2018-12-20 09:02:36
电子制作(2017年13期)2017-12-15 09:00:08
电子制作(2017年20期)2017-04-26 06:57:46
语文知识(2015年11期)2015-02-28 22:01:55
物理与工程(2011年1期)2011-03-25 10:02:45
物理(2009年1期)2009-03-24 04:31:40
