
基于PIC18F4431 的永磁BLDCM 控制系统设计
2014-03-13 07:01毛攀峰
电子科技 2014年5期
何 琪,毛攀峰
(浙江国际海运职业技术学院 船舶工程学院,浙江 舟山 316021)
在当前水泵电机控制领域中,传统的直流有刷电机由于其工艺要求高、维修保养不便、利用效率低等因素已逐步被淘汰。替代其是一种BLDCM(Brushless Direct Current Motor)即无刷直流电机,该BLDCM 控制电机转速高、效率大已在水泵制造业中得到证实,今后将会成为此领域中的主流电机。
BLDCM 主要包括两部分,即直流永磁电机部分和电枢绕组驱动控制部分,BLDCM 的技术虽可大幅提高电机的效率,但对控制驱动部分也涵有一定的技术要求,若控制驱动与电机匹配不但不能有效的提高电机效率,且还会降低电机寿命。因此,结合目前DSPIC[1-2]技术将有效地完成对BLDCM 的控制。
1 系统总体设计
BLDCM 技术实际是一种直流永磁无刷电机与PWM 控制相结合的技术,通过霍尔传感器对磁路的判断,确定永磁转子当前位置,在确定相应的PWM 控制脉冲驱动定子电枢绕组,形成转矩,使电机快速转动[3]。从某种控制程度上讲,此种控制也属闭环控制系统,如图1 所示。
1.1 系统总体组成及功能
BLDCM 包括直流永磁电机和电枢绕组驱动控制,直流永磁电机定子绕组驱动电源为直流,绕组分为A、B、C 三相、6 极,三相绕组互为180°,每相绕组根据缠绕方向设定一个磁极对;转子为四磁极的永久磁铁,互成90°夹角。这样可使改变定子绕组磁极属性产生磁转矩,使得转子快速转动,因此转速与定子绕组磁极改变的速度与方向有关[4]。
电枢绕组驱动部分为一块PCB 控制板,主要是输出PWM 脉冲波,采集转子位置,选择输出程序,并输出对应的PWM 脉冲,驱动定子绕组有序改变磁极属性,使转子转动。另外还包括电源模块、保护环节等。
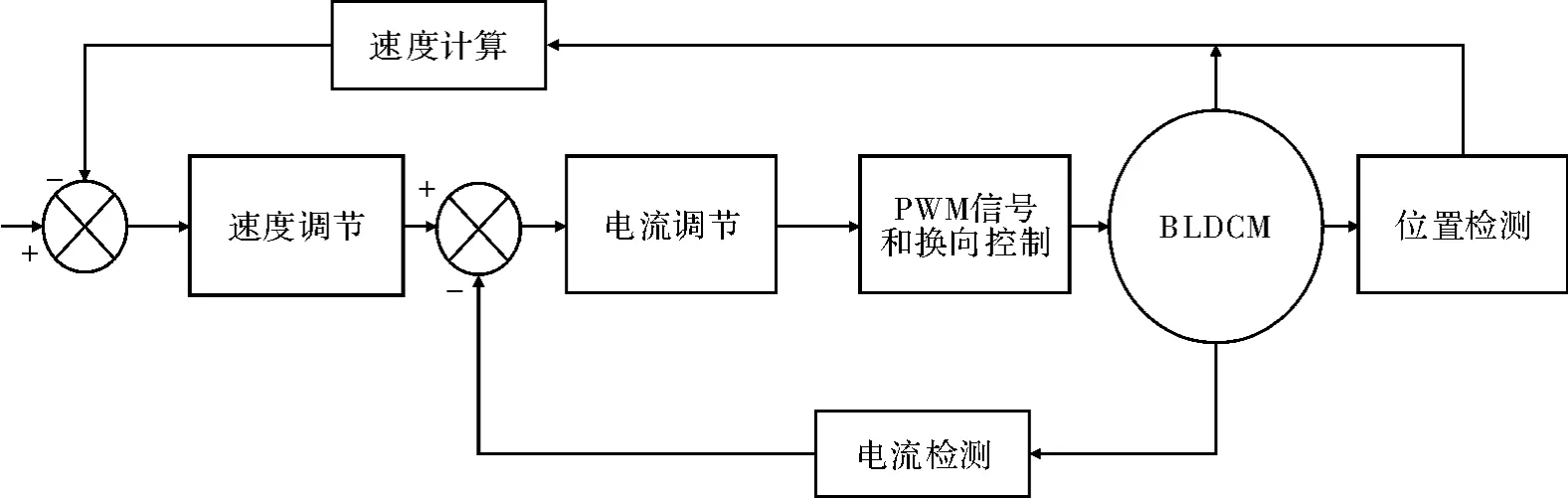
图1 控制系统结构框图
1.2 BLDCM 磁路气隙磁场的计算模型建立
直流无刷电机的定子、转子的结构形式可有多种选择,为了减小定子绕组间的互感影响,提高磁性利用率,增加定、转子磁耦合程度,本控制系统采用定子6极转子4 极的形式[5],如图2 所示。

图2 电机结构剖面图
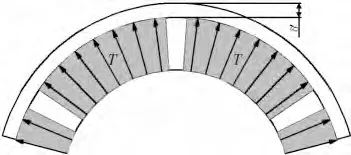
图3 永磁体和气隙结构磁化模型示意图
根据图3 所示,电机转子为表面式永磁形式,δ 表示气隙长度,kδ为气隙长度系数,电机的气隙均匀则可得出其有效的气隙长度δ'为

设定电机铁芯磁导率为无穷大,以永磁体和空气气隙为求解区域,得

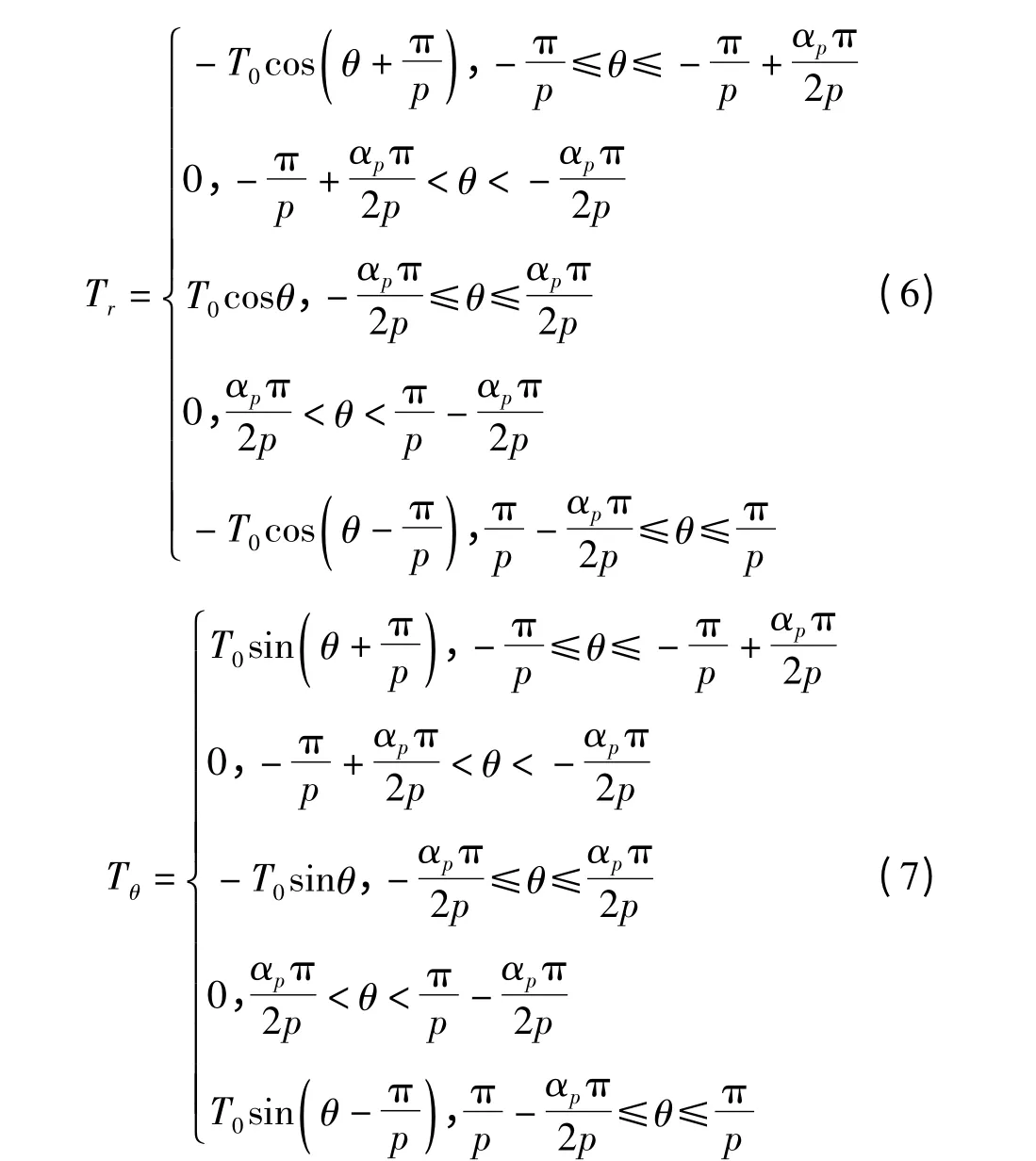
式中,T0为剩余磁化强度,包括Tr径向分量和Tθ切向分量两部分,即

若设定标量磁位为λ,这样气隙与永磁体中分别满足
数学思想方法都是以一定的数学知识为基础,反过来又促进数学知识的深化以及向能力的转化.《普通高中数学课程标准》明确提出数学教学必须鼓励学生积极参与数学活动,不仅是行为上的参与,更要有思维上的参与.笔者认为,在高中数学的核心概念教学中,要引导学生体会和领悟数学思想方法中蕴含的数学的本质内涵和的重要规律.要通过各种方式激活思维,深化思维,不断地提高数学思维能力.这样才能逐步提高学生发现问题、分析问题和解决问题的能力,不断提高学生的思维品质和数学素养.

由此建立Tr径向分量模型式(6)和Tθ切向分量模型式(7)为
1.3 系统控制原理分析
BLDCM 控制系统主要是根据转子的实际位置,PIC 单片机采集位置信号输出不同的PWM 脉冲波形,触发桥式逆变电路使定子绕组获得不同的磁极属性[6-8]。PIC 单片机通过对PWM 波形的控制来实现对电机转速的控制,如图4 所示。
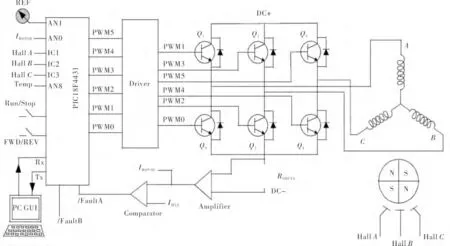
图4 控制原理图
PWM 脉冲和霍尔信号有直接关系,通过分析转子位置可得出关系,如表1 所示。
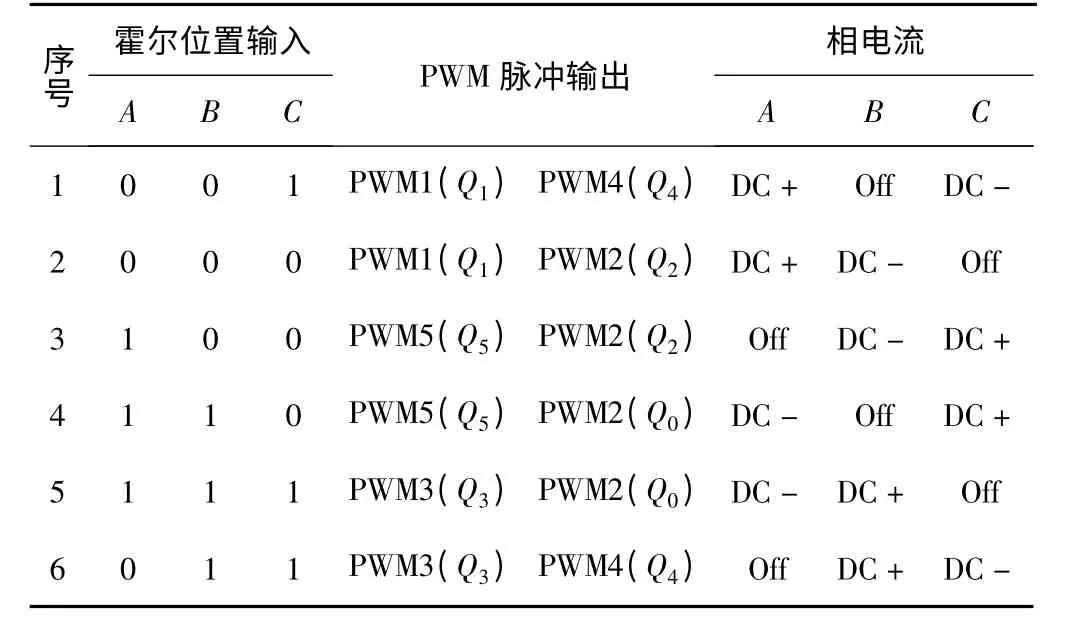
表1 电机顺时针旋转时霍尔位置与PWM 关系表
2 控制系统的硬件设计
系统以PIC18F4431 芯片作为主控制器,可通过RS-485 总线与上位机之间进行实时通信,通过输出PWM 信号来控制三相电桥,从而调节电机转速。转子的位置和电机的转速则由霍尔元件检测得到,同时利用在三相电桥低端处设置的测流电阻来测量定子的电流。主控制器在电机运行过程中不断地采集转子的实时位置,根据位置的变化情况来发出控制命令,实现了对电机转速的闭环控制。
2.1 硬件组成部分及其功能
本系统的控制器核心采用PIC18F4431 芯片,PIC18F4431 是由Microchp Technology 公司新推出的一款专门针对电机运动控制、采用纳瓦技术具有高性能nVM 和AlD 功能的增强型闪存单片机。系统采用该8位单片机的优势在于:采样速度高达2×105次每秒的10 位A/D 转换模块、4 对具有互补输出的14 位功率控制PWM 模块、灌电流峰值可达25 mA、集成8×8 单周期硬件乘法器和WDT 看门狗。
通过分析比较各种电子开关器件的性能特点后,考虑到场效应管具有理想的高频特性且价格低廉,因此设计了由场效应管构成的三相电桥,来作为无刷直流电机的三相逆变驱动电路。该电路不仅具有较好的隔离效果,且动态特性也较为理想。
系统采用霍尔传感器来检测位置,由于霍尔传感器开漏输出的特性所以需接上拉电阻,在系统中为霍尔传感器设置了低通RC 滤波器处理,目的是防止无刷电机中的强磁场和无刷电机控制器PWM 载波频率的干扰。PIC18F4431 的3 个输入引脚连接3 路的位置信号,可检测到每个输出信号的上升沿和下降沿。当检测到的电平发生变化时,即会使程序进入中断服务,从而在中断服务中计算定子的转速及实现对定子的换相。
2.2 硬件抗干扰设计
由于系统中存在着高频变压器、电动机、开关器件等,会带来强烈的电磁干扰源,所以硬件电路的抗干扰措施是必要的,本系统主要考虑以下几个方面:(1)抑制干扰源。每个IC 电源和地两端并联一个100 nF 的电容;高频电容的连线尽量靠近电源端并尽量粗短;PCB 上布线避免90°折线。(2)切断干扰传播途径。主电源与低压辅助电源相互隔离、不共地;给各路输出的电源加滤波电路;注意晶振布线。(3)提高敏感器件的抗干扰性能。布线时应尽量减少回路面积,芯片的IO 口不得悬空。
3 控制系统的软件设计
软件部分采用全数字双闭环的控制结构,该结构能使无刷直流电机获得较好的动态性能。整个控制结构引入了电流环和速度环两部分。当速度的反馈量与给定的速度参考量形成一个偏差,该偏差通过速度的调节会随之产生一个电流参考量,该电流参考量与电流反馈量之间形成的偏差经电流调节后,作为PWM占空比变化的控制量从而实现了对无刷直流电机的速度调节。
3.1 PWM 换相控制
无刷直流电机的换相是通过内部设置的霍尔传感器实现的。在电机运转的整个过程中,每当电机的定子转过60°时,霍尔传感器便会立即将检测到的换相信号送至主控制器,使主控制器产生一个硬件中断。主控制器会在中断服务程序中输出相应的PWM 信号,从而实现准确的换相。程序流程如图5 所示。

图5 PWM 换相控制子程序
3.2 电流环控制
控制系统中一般有外环速度环和内环电流环,前者是依速度反馈定稳速度,后者是据电流变化定稳力矩。在本系统中,电流环的作用主要是调节电流,以确保电机的安全稳定运行。该电流环采用变速积分的PI 调节器,该子程序流程如图6 所示。

图6 电流环子程序流程图
3.3 速度环控制
为了抑制速度波动的程度,同时增加系统抗负载干扰的能力,系统采用速度环的控制方式。如给定转速与实测转速之间通过一个限幅PI 调节器,从而得出一个参考电流值。该子程序流程如图7 所示。

图7 速度环子程序流程图
4 模拟运行调试
通过在Matlab 环境中设定电机水泵运行的各种参数进行仿真,以80 W、65 W、55 W、45 W 的直流无刷电机水泵进行运行分析,得出下列特性曲线和启动速度响应。
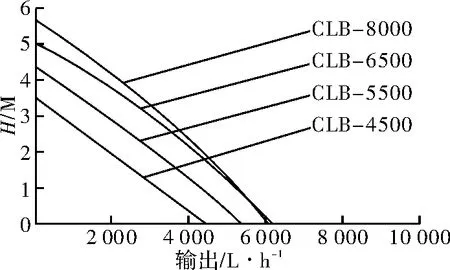
图8 输出特性

图9 启动速度响应图
该直流无刷永磁电机控制系统,启动响应速度快,电机的外输出特性性能优异,并能充分提高电机效率,同时启动转矩较大、可靠性高、噪声低。
[1] 张陶,王毓顺,李学华.基于DSPIC 的无刷直流电机闭环控制系统设计及软硬件实现[J].科学技术与工程,2007,9(7):84-87.
[2] 王继强,王凤翔,鲍文博,等.高速永磁电机转子设计与强度分析[J].中国电机工程学报,2005,8(25):141-145.
[3] 郭辉,宋大为,邱爱华.自适应PID 算法在数字式电子调速系统中的应用[J].上海工程技术大学学报,2007,21(2):126-129.
[4] 刘庆宝,路军.ST7FMC 在螺杆泵无刷直流电机控制器中的应用[J].自动化应用,2010(1):38-39.
[5] 褚文强,辜承林.新型横向磁通永磁电机磁场研究[J].中国电机工程学报,2007(24):58-62.
[6] 杨涤.系统实时仿真开发环境与应用[M].北京:清华大学出版社,2003.
[7] 张会强,李革臣.模糊PID 控制器在无刷直流永磁电机控制系统中的应用[J].自动化技术与应用,2009,28(6):20-22.
[8] 俞佳琦,叶云岳,范承志.基于EKF 的低速永磁电机控制系统建模与分析[J].机电工程,2009,26(2):31-33.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
上海大中型电机(2021年1期)2021-06-09
防爆电机(2020年6期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23
城市轨道交通研究(2015年5期)2015-02-27
