
DCT换挡液压系统主油压阀的模糊PID控制
2014-03-13 11:40孔慧芳张恩源
北京汽车 2014年3期
孔慧芳,张恩源,鲍 伟
(合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
0 引 言
双离合器式自动变速器(DCT)综合了电控机械式自动变速器(AMT)和液力机械式自动变速器(AT)的优点,是一种新型的自动变速器[1-2]。DCT采用液压阀做执行机构,DCT液压系统能否按照既定的要求正常可靠地运行,在很大程度上取决于液压阀的性能优劣[3-4],因此对液压系统中的电磁阀进行有效控制就显得尤为重要。
文中以装载了湿式双离合器式自动变速系统的主油压阀为研究对象,分析了液压换挡系统主油压阀的工作原理,建立了主油压阀的数学模型。因为电磁阀具有非线性、参数时变、数学模型无法精准获得等特点,故采用模糊 PID控制器控制换挡压力,提高抗干扰能力,并进行了仿真验证。
1 DCT换挡液压控制系统主油压阀的数学建模
1.1 DCT换挡液压系统主油压阀的工作原理
液压换挡系统的主油压电磁阀为直动式电液比例减压阀,根据直动式电液比例阀的工作原理,可以得到其传递函数。图 1为直动式电液比例减压阀的原理图,其中比例电磁铁提供指令力信号,减压阀处于常开状态,阀芯右端面直接驱动阀芯。
直动式电液比例阀的阀芯受力方程为[7]
式中,M 为阀芯质量,kg;Bv为阀芯粘性阻尼系数,N·s/m;Bt为瞬态液动力阻尼系数,N·s/m;Ks为液动力弹簧刚度,N/m;A为出口压力反馈作用面积,m2。
当给比例电磁铁通电后,阀芯向右移动,这时阀口打开到最大开口位置,随着负载的增加,减压阀出口压力随着增加,出口压力通过反馈通道作用在阀芯右端,与输入的电磁力比较,当比例减压阀电磁力所对应的输出压力高于其负载决定的压力时,减压阀口的开度不变化,减压阀不起减压作用。当比例减压阀的电磁力所对应的输出压力等于其出口负载决定的压力时,减压阀开始起减压作用,阀口开度减小,减压缝隙的变化对应一定的压差,出口压力基本上不随进口压力的变化而变化。这样保证了出口压力保持不变,并且与输入电流成正比,如果出口压力对阀芯的作用力大于电磁力,阀芯左移,A口与T口相通,使A口压力下降,直到阀芯处于新的平衡位置。
1.2 DCT换挡液压系统主油压阀的数学建模
比例电磁铁输出力方程
式中,K2为比例电磁铁的电流-力增益系数,N/A。
减压阀出口流量-压力方程
在负载流量为零时,流量连续方程为
对上述公式进行拉式变换可得
式中各参数值如表1所示。
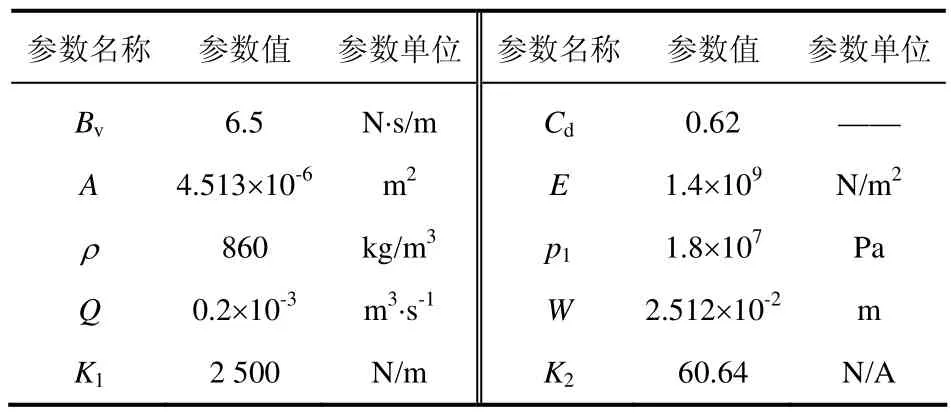
表1 主油压阀仿真参数表
2 模糊PID控制器的设计
将模糊控制与传统PID控制相结合,可以提高被控对象的适应能力,即鲁棒性较好。常用的方法有2种:一种是将模糊控制与传统PID控制相结合的双模控制或复合控制;另一种是通过模糊推理自适应整定,调整PID参数[7]。文中采用第1种方法。
根据直动式电液比例减压阀传递函数设计的基于模糊PID双模控制算法的控制模型如图2所示,用来控制油压,使油压的变化满足需要。图中r为输入量,e为输入和输出的误差量,y为输出量。
模糊-PID复合控制的策略是:在误差或者误差变化较大时采用模糊控制,在误差小时转化为PID控制。或者说由模糊控制负责粗调、由 PID负责细调。二者的转换根据设定的误差阀值由计算机软件自动实现。误差阀值的计算公式为
其中,emax为误差最大值,n为量化级数[8]。
文中设计的控制器中,量化级数n=7,根据计算公式,误差最大值emax为3,所以设置为 0.2。
电磁阀通过控制输入电流来控制输出压力。设计模糊控制器时以电磁阀输出压力的误差 e和输出压力的误差变化率Δe作为模糊控制器的输入,模糊控制器的输出为电流增量Δi。
1)输入量的模糊化。将压力误差的模糊语言定为:{负大(NB)、负中(NM)、负小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB)},设定基本论域为:{-2,-1,0,1,2};输出压力的变化率的模糊语言定义为:{负大(NB)、负小(NS)、零(Z)、正小(PS)、正大(PB)},设定基本论域为:{-5,-4,-3,-2,-1,0,1,2,3,4,5};
2)输出量的模糊化。将输出离合器压力增量Δi 的模糊语言定义为:{负大(NB)、负中(NM)、负小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB)},设定基本论域为:{-5,-4,-3,-2,-1,0,1,2,3,4,5}。
3)模糊控制规则的确定。模糊控制规则实质上是将操作员的控制经验加以总结,从而得出一条条模糊条件语句的集合。确定模糊控制规则的原则是必须保证控制器的输出能够使系统输出响应的动态性能达到最佳,如图3所示。
4)清晰化。采用最大隶属度法。若输出量模糊集合C′的隶属度函数只有一个峰值,则取隶属度函数的最大值为清晰值,即
其中,z0为清晰值。若输出量的隶属度函数有多个极值,则取这些极值的平均值为清晰值。
利用上述设计的模糊控制器可以建立比例电液阀的模糊PID控制系统仿真模型,如图4所示。其中P=0.8,I=0.6,D=0.1。
3 仿真结果与分析
由于电磁阀在工作时不是理想的状态,可能会出现劳损、磨损或者卡滞等现象,造成阀口面积梯度变化或者阀口流量系数变化等。这时,主油压阀的传递函数将发生变化,传统的PID控制器由于参数并不变化,可能无法保证控制的效果。
取阀口面积梯度为2.512×10-2,阀口流量系数为0.62时,仿真结果如图5(a)所示;取阀口面积梯度为2.0×10-2,阀口流量系数为0.5时,仿真结果如图5b所示。
仿真结果可见,模糊PID与常规PID的控制方式相比具有超调量小和调节时间短的优势。这是因为模糊PID控制规则是通过专家经验设计的模糊规则,当被控对象发生变化时,模糊控制器仍然可以进行有效控制,经过实际调试后其鲁棒性很容易达到要求。
4 结 论
在分析双离合式自动变速器液压换挡系统主油压阀的工作原理的基础上,建立了主油压阀的数学模型。通过理论分析,依据主油压阀的数学模型设计了模糊PID控制器。仿真结果表明该控制器在电磁阀的某些参数改变,并导致其传递函数变化的情况下,仍然能保证良好的控制效果,即在模糊PID控制算法下能够满足系统的鲁棒性要求。
[1]杨伟斌,吴光强,秦大同.双离合器式自动变速器传动系统的建模及换挡特性[J]. 机械工程学报,2007,43(7):13-21.
[2]牛铭奎,程秀生,高炳钊,等.双离合器式自动变速器换挡特性研究[J].汽车工程,2004,26(4):453-457.
[3]毛卫平. 液压阀[M]. 北京:化学工业出版社,2009.
[4]贾铭新,胡晓东.液压传动与控制[M]. 北京:国防工业出版社,2010:106-109.
[5]王春行. 液压控制系统[M]. 北京:机械工业出版社,2011:32-33.
[6]姚佳.电液比例减压阀频响特性仿真与试验研究[D].湘潭:湖南科技大学,2009.
[7]罗兵,甘俊英,张建民.智能控制技术[M]. 北京:清华大学出版社,2011:62-63.
[8]王华强,袁浩,杨滁光.自适应模糊神经网络在EPS中的应用[J].合肥工业大学学报:自然科学版,2011,34(2):188-191
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
北京航空航天大学学报(2022年6期)2022-07-02
汽车实用技术(2022年4期)2022-03-07
汽车维护与修理(2021年3期)2021-08-12
汽车零部件(2019年10期)2019-11-13
建材发展导向(2019年10期)2019-08-24
——次级调压阀
汽车与驾驶维修(维修版)(2019年7期)2019-07-29
中国建筑金属结构(2018年6期)2018-08-31
北京航空航天大学学报(2017年8期)2017-12-20
专用汽车(2016年4期)2016-03-01
