一种低功耗的水中目标监测系统设计
2014-03-10 05:25:30程宏魏伟荣严胜刚
声学与电子工程 2014年4期
程宏魏伟荣严胜刚
(1.昆明船舶设备研究试验中心,昆明,650051)
(2.中海石油(中国)有限公司南海深水天然气开发项目组,深圳,518000)
(3.西北工业大学航海学院,西安,710072)
一种低功耗的水中目标监测系统设计
程宏1魏伟荣2严胜刚3
(1.昆明船舶设备研究试验中心,昆明,650051)
(2.中海石油(中国)有限公司南海深水天然气开发项目组,深圳,518000)
(3.西北工业大学航海学院,西安,710072)
针对安装于浮标上长期值更的水中目标监测系统开发需求,研究并开发了一种低功耗目标监测系统,该系统以低功耗DSP芯片TMS320C5535与FPGA芯片A3P060为核心,配合低功耗的模拟通道电路,构建硬件平台,综合采用相关累积及线谱概率检测方法,实现了对舰船目标信号的检测和运动状态变化的判别;湖上试验结果表明在监测范围内系统能正确监测船只停航并发出警示信息,满足实际应用要求;设计的系统工作功耗低,识别算法全速运行时约为150 mW,满足水下长期值更工作的特殊要求。
低功耗;水中目标监测;线谱检测;相关检测
基于浮标的水中目标监测系统,其电源由浮标上的太阳能板和蓄电池提供,对系统在功能复杂性、算法实时性、可长时间工作性等方面提出了很高的要求。本方案采用新的低功耗软、硬件系统开发技术和具有可靠、准确、实时性良好的算法来构建新的水中目标监测系统以满足实际使用需求。方案综合考虑系统的功耗、算法的实时性以及判别的准确性,以低功耗DSP芯片TMS320C5535和FPGA芯片A3P060为基础构建了一个水下被动目标监测系统。该系统具有小型化、整体运行功耗低、判别准确性高、判决准则和参数可远程设定等特点,可完成对舰船目标的检测和运动状态的判别。
1 系统硬件平台设计
水中目标监测系统主要由水听器、模拟信号处理器、数字信号处理与控制器及无线通信(北斗)模块四部分构成。水听器负责水声信号的获取,并完成声信号到电信号的转换;模拟信号处理器完成低功耗放大、滤波以及增益控制等信号调理功能;调理后的信号经A/D转换后输入到以低功耗DSP处理芯片TMS320C5535构建的数字信号处理及控制器,完成舰船目标的检测与判别,一旦判断舰船目标航行到监测区域内停泊或作业,数字信号处理及控制器开启北斗设备,向岸上的控制中心机房回传警示信息;北斗设备完成浮标位置测量和无线数据通信。系统的组成框图如图1所示。
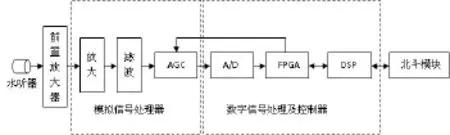
图1 水中目标监测系统组成框图
1.1 数字信号处理及控制器的设计
数字信号处理及控制器是水中目标监测系统的一个重要组成部分,其主要功能包括:①进行水声信号的实时采集、处理,并完成目标的检测和运动状态识别以及警示信息回传;②在设定时间开启北斗模块电源,完成电池电压测量,并将电压信息、北斗位置信息等回传;③定时或在收到新指令时关闭北斗模块电源;④通过串口可对工作中的设备在线调整识别门限、选择识别准则,以保证设备工作的状态最佳。硬件框图见图2。
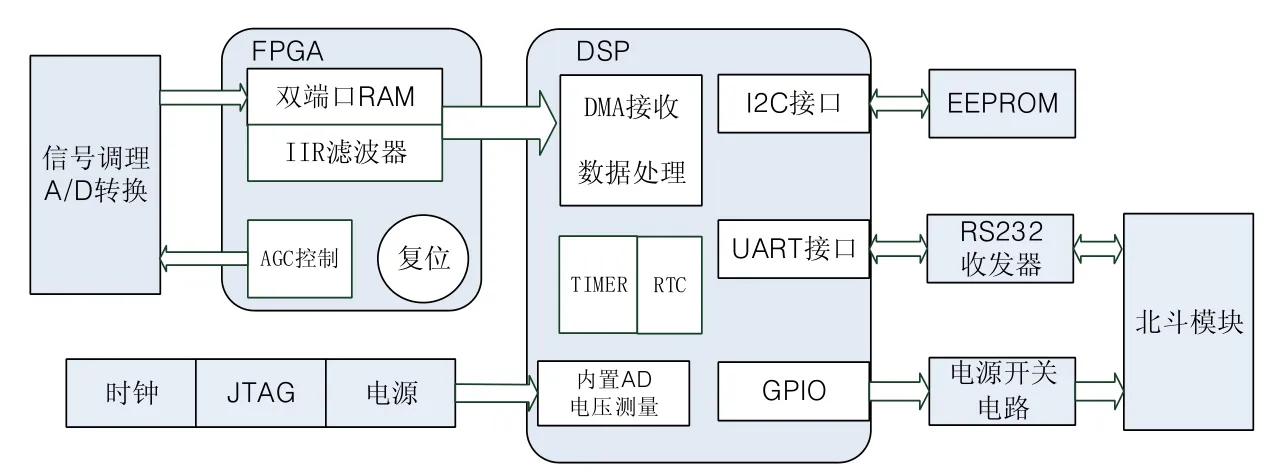
图2 数字信号处理及控制器硬件框图
数字信号处理及控制器首先进行信号采集,然后进行AGC自适应调整,最终完成目标检测和判别及报警。由于数字信号处理及控制器安装于浮标上,因此对电路板的尺寸、接口,尤其是功耗有着严格的限制。为了减少硬件电路规模,采用集成了大容量内部存储器、超低功耗高性能DSP实现目标信号的实时检测;同时采用超低功耗的FPGA芯片A3P060来实现DSP与外围器件的接口逻辑。这种实现方式既可以减少硬件电路的规模,提高了集成度,同时还可以灵活地进行扩展。
数字信号处理及控制器选择TI公司的超低功耗定点数字信号处理器TMS320C5535作为主处理器,该处理器是专为低功耗应用而设计;FPGA采用Actel公司的A3P060,其独特的熔丝FLASH结构使其功耗大大降低。该系统中,DSP和FPGA使用I2S总线和GPIO进行数据传递。其他没有用到的GPIO引脚都将它连至FPGA的I/O上,方便系统以后的扩展与修改。
1.2 外围电路设计
数字信号处理及控制器外围电路设计主要包括ADC电路、RS232收发器电路和北斗电源开关电路以及整个系统的供电电路。
ADC接口电路设计如图3所示。AD7694采用独立单电源5 V供电,由电源芯片提供并经RC滤波后得到;5 V参考电压REF则由高精度参考电压芯片ADR4550提供; CNV和SCK信号由FPGA提供,改变CNV和SCK周期即可设置不同的采样频率。
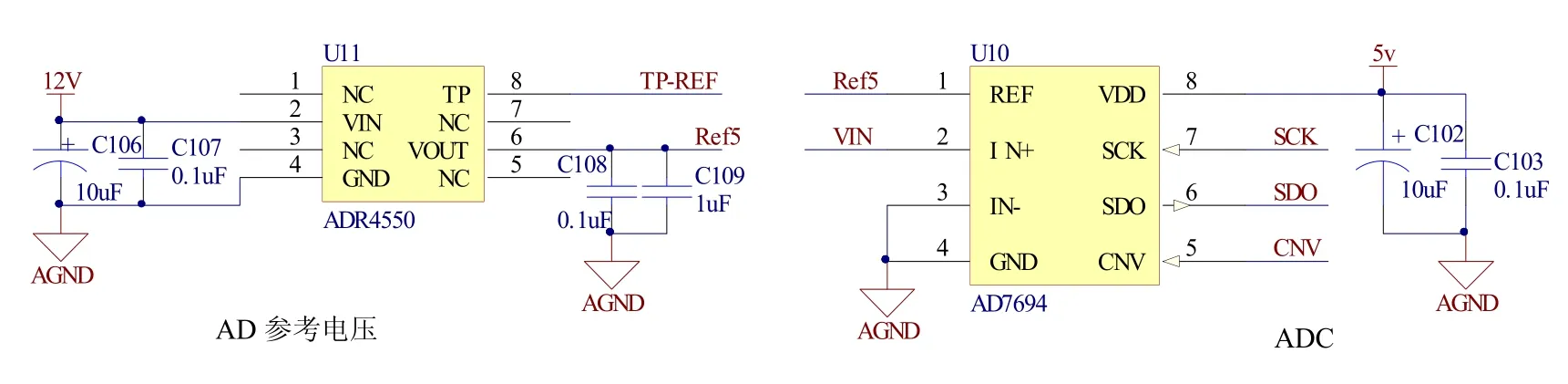
图3 AD7694电路设计图
系统采用RS232接口实现信号处理机与北斗模块的通信,方案中TMS320C5535的UART外设通过MAXIM公司的MAX3222E实现RS232电平转换。图4为RS232接口电路图。MAX3222E采用独立单电源3.3 V供电,由电源芯片提供并经RC滤波后得到;两个传输信号F_TXD和F_RXD直接与FPGA链接,而FPGA再将这两个信号连接至DSP的UART_TXD和UART_RXD。将接至FPGA,在用不到RS232时实现低功耗,允许监视外设,仅消耗1 μA的电源电流。
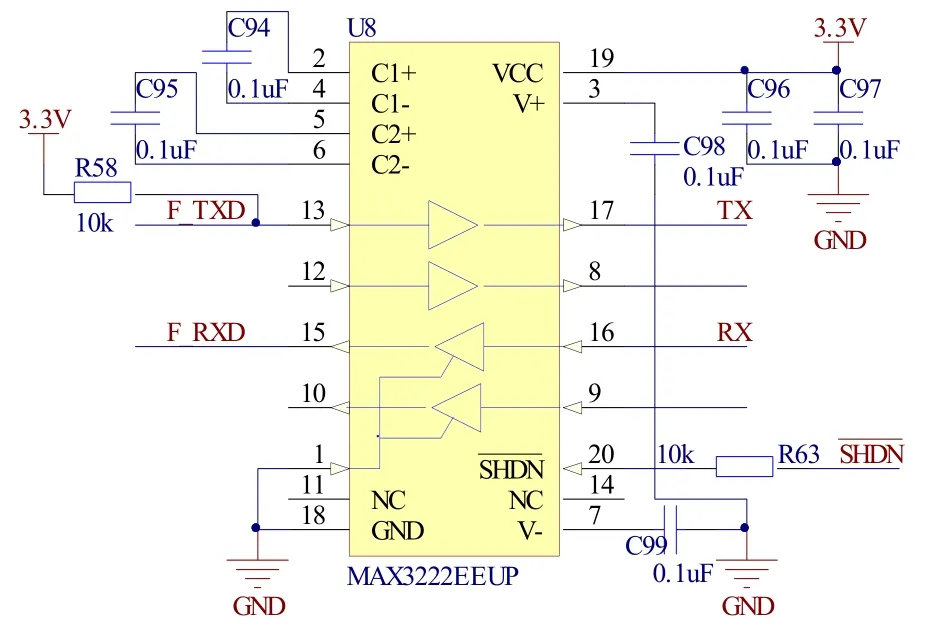
图4 RS232接口电路图
由于北斗设备的待机功耗较大,因此为了节省电能,只有在DSP与北斗通讯时才开启北斗。北斗电源开关电路的功能主要是需通过DSP的GPIO高低电平来控制北斗电源的开关。北斗电源开关电路图如图5所示。MOS管的型号选择IRF9310,是因为北斗工作时候的瞬间电流最大可能会有10 A左右,因此要选择一款电流较大且导通电阻较小的MOS管,以防止器件的损坏和功率的损耗。IRF9310的电流值Id高达20 A,而导通电阻Ron仅有4 mΩ,完全满足系统要求。
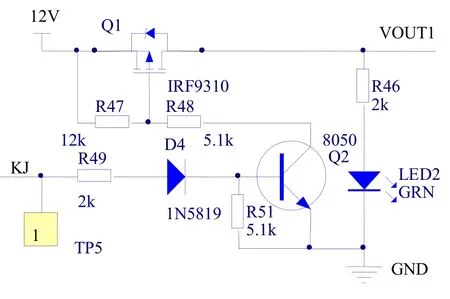
图5 北斗电源开关电路图
2 系统软件设计
系统上电后,DSP按照顺序初始化各外设接口。之后通过北斗接收来自上位机的参数命令。DSP解析完参数命令后使系统工作在指定的模式下,包括采样频率、滤波器系数、判别门限、观察时间和定点发送系统信息的时间间隔等。DSP同时完成对信号的线谱检测、相关检测、综合判定等。DSP的软件组成及工作流程如图6所示。
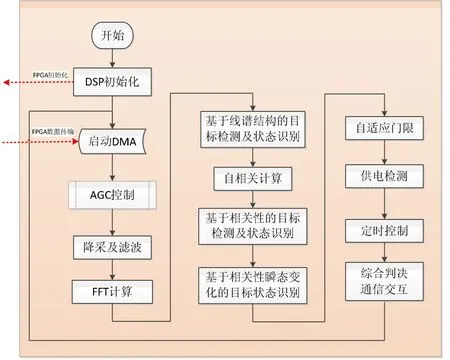
图6 DSP的软件组成及流程图
2.1 基于线谱的目标检测及判别
线谱特征是运动舰船的固有特征,通过检测舰船的线谱特征可以实现运动舰船的检测及其状态的判别。
线谱检测的工作原理及流程如下:
● 在设定的系统工作频率范围内(50 Hz~5 kHz),进行线谱检测和幅度判别;
● 在确认时间内统计超过幅度门限的有效线谱数量,并与门限进行比较,确认目标有无。
下一步根据目标的上一个状态及当前状态,确定目标停航还是远离。基于线谱的目标判别流程如下:
● 判断当前状态是否为有目标,如果有目标则与上一状态比较,若为首次发现目标则记录目标的频谱结构,如不是首次发现,则判断是否与已发现的目标为同一目标;
● 从有目标到无目标,则通过从有目标到无目标的过渡时间判断目标停航还是远离,如果目标在浮标附近停航,则给出警示信息。
2.2 基于辐射噪声相关的目标检测及判别
相关性分析是检测两段信号相似性的一种有效方法,通过相关累积判定是否出现目标或目标停航(远离),具体的工作流程为:
● 依据设定的相关时间,选取数据段进行自相关计算;
● 对相关输出进行低通滤波,并与设定的目标有效门限进行比较;
● 判断是否有目标,进入自适应门限处理。
确定是否有目标后更重要的是进行目标运动状态转换的判别。基于相关的目标运动状态转换判别过程如下:
● 判断当前是否有目标,并与上一目标状态比较,并记录发现目标的时间;
● 如果判断本周期无目标,则通过最后一次有目标到无目标的过渡时间判定目标远离还是停船。
3 试验验证
水中目标监测系统完成实验室调试后,开展了湖上验证试验。监测系统设备置于工作母船上在湖中漂泊,显控设备置于岸边控制中心内。另外安排一条目标船,在距工作母船不同距离上航行或停船,检验水声监测系统的作用距离、目标状态判断等性能和功能指标,目标船航行轨迹如图7所示,分别在距监测系统800 m、1.6 km、1.5 km、1.2 km的不同点位停船。
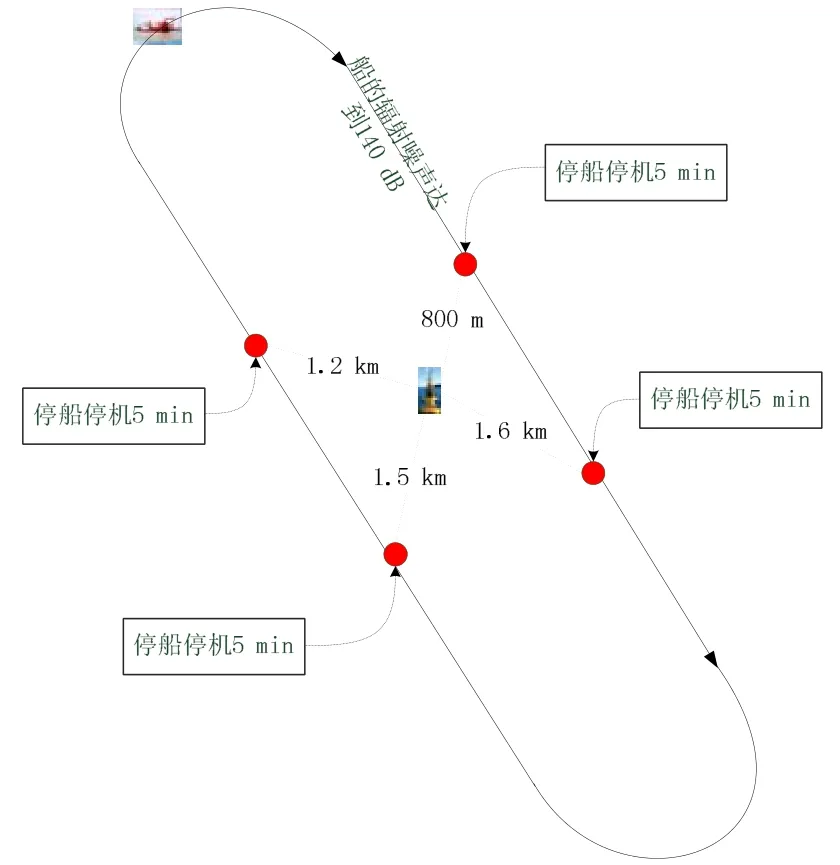
图7 湖上试验示意图
试验结果表明:对于目标船以7 kn以上速度航行,检测距离大于1.6 km,且能正确判别船只的停航及远离;在目标停船时,发出报警。系统达到要求的技术指标。
系统正常工作时平均功耗约为150 mW,在DSP主频设置为60 MHz的情况下,系统单次统计判别算法的执行时间仅为30 ms,在监测系统的准确性和实时性上可以满足水中目标监测系统所需的实际工作指标要求。
4 结论
论文研究了基于低功耗设计的通道预处理模块与TMS320C5535构建的低功耗水声被动目标监测系统,解决了水下目标被动监测系统低功耗实现的难题。系统软件综合采用相关累积及线谱概率检测方法,实现了对舰船目标的检测及其运动状态变化的监测。系统经湖试验证,在实时性、准确性和低功耗方面均达到水中目标被动监测系统的指标要求。
[1]李秀坤,杨士莪.水下目标特征提取方法研究[J].哈尔滨工程大学学报,2001,22(1): 25-29.
[2]陈敬军, 陆佶人.被动声呐线谱检测技术综述[J].声学技术,2004,23(1): 57-60.
[3]陈柔伊.水下目标识别中的特征提取与分类研究[D].华南理工大学,2011.
[4]赵延安,张效民,姚运启,等.舰船辐射噪声功率谱特征提取及系统实现[J].计算机测量与控制,2010 (8): 1821-1824.
[5]邓磊磊.舰船辐射噪声的特征线谱提取[D].哈尔滨工程大学,2011.
[6]宋振宇,丁勇鹏,赵秀丽,等.基于 LOFAR 谱图的水下目标识别方法[J].海军航空工程学院学报,2011,26(3): 283-286.
[7]姚振轩,张效民,赵延安,等.基于基频提取的舰船目标识别系统设计[J].鱼雷技术,2011,19(5): 355-359.
[8]熊紫英.基于LOFAR谱和DEMON谱特征的舰船辐射噪声研究[J].船舶力学,2007,4(11):2
[9]Texas Instruments Incorporated.TMS320VC55X系列DSP的CPU与外设[M].彭启琮,武乐琴,张舰,等,译.北京:清华大学出版社,2005.
[10]Texas Instruments.TMS320C5535 Ultra-Low Power DSPTechnical Reference Manual[M].2011.
[11]Actel Corporation.ProASIC3 Flash Family FPGAs Datasheet[M].2011.
[12]赵洪亮,卜凡亮,黄鹤松.TMS320C55xDSP应用系统设计[M].北京: 航空航天大学出版社,2010.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17 06:27:00
成都信息工程大学学报(2021年1期)2021-07-22 07:21:34
信号处理(2018年5期)2018-08-20 06:16:02
信号处理(2018年5期)2018-08-20 06:16:00
信号处理(2018年8期)2018-07-25 12:25:42
信号处理(2018年8期)2018-07-25 12:24:56
舰船科学技术(2015年8期)2015-02-27 15:38:52
舰船科学技术(2014年5期)2014-03-08 06:43:40
电子设计工程(2014年17期)2014-02-27 11:59:53
电子设计工程(2014年12期)2014-02-27 11:58:16