一种用于井下钻具旋转中动态方位测量的新方法
2014-03-10 07:37杨全进蒋海旭
石油钻采工艺 2014年1期
杨全进蒋海旭 左 信
(1.中国石油大学,北京 102249;2.胜利石油工程有限公司钻井工艺研究院,山东东营 257017)
一种用于井下钻具旋转中动态方位测量的新方法
杨全进1,2蒋海旭1左 信1
(1.中国石油大学,北京 102249;2.胜利石油工程有限公司钻井工艺研究院,山东东营 257017)
为了在井下钻具连续旋转过程中实时准确测量出重力工具面,介绍了石油钻探中描述井眼姿态的轨迹基本参数以及如何实现测量姿态参数的传感器基本原理,着重介绍了井眼姿态测量常用的定向传感器结构及所测量的参数,提出在旋转导向钻进中钻具连续旋转时动态重力工具面的测量方法,重点分析了利用矢量旋转的方法,从理论上推导计算磁工具面与重力工具面差角的过程,并通过试验的方法验证了算法的准确。该方法有效地克服了钻具连续旋转时传统测量实时重力工具面误差偏大的缺点,为实现旋转导向测控系统的自主研制和钻具连续旋转时工具面测量提供了一种测量方案。
井下工具;钻具旋转;矢量旋转;定向传感器;工具面
钻探定向井、水平井过程中需要实时地获取井下钻具相对于某一参考点的相对位置,也即一定的偏移角,在工程上称为工具面或工具面角。工具面角在直井中通常以磁北为参考点,工程上称这种以磁北为参考点的工具面为磁工具面MTF(Magnetic Tool Face)。在定向井、水平井的井斜大于一定角度后,工具面通常是以重力方向作为参考点,工程上称为重力工具面GTF(Gravity Tool Face)[1-3]。重力工具面GTF是基于测量物体的当地重力场而得出的,测量重力场通常利用加速度计测量[4-7]。旋转导向钻井中需要实时获得工具面,然后控制导向翼肋在预先设置的位置上伸出和收回。然而在旋转导向钻进中要瞬时地采集计算出重力工具面几乎是不可能的,因为井下的强振动通常都远远大于一个重力加速度。磁工具面MTF的测量是基于当地磁场而得到的,钻具振动、旋转对磁力计测量几乎没有影响。笔者提供一种将磁工具面转化为重力工具面的计算方法,用于在钻具旋转中实时计算工程所常用的重力工具面。
1 原理及实现方法
在石油钻井定向井、水平井施工中,通常采用定向传感器测量计算所需要的工程参数[8-9],主要有重力工具面角(GTF)、磁性工具面角(MTF)、井斜角(I)、方位角(A)、温度(T)及磁倾角(D)等 。传感器通常由3轴加速度传感器、3轴磁通门传感器和基本的处理电路组成[10],如图1所示,3个加速度传感器分别安装在仪器骨架的X、Y、Z轴坐标方向,同样3个磁通门传感器也分布在X、Y、Z轴坐标方向,其中X、Y、Z轴坐标方向的定义按规则为:Z轴为井眼中心线方向,X轴垂直于仪器参考面,Y轴与X、Z轴满足右手定则。静态计算各参数的方法参见参考文献[10]。

图1 井下工具坐标系
在旋转导向钻井控制系统中,需要实时获得工具面,控制导向翼肋在预先设置的位置上伸出和收回[11-13]。由于井下振动及钻具旋转时离心加速度的影响,钻具旋转时传统的测量方法无法得到准确的重力工具面,这时的重力工具面只有通过测量其他参数间接测量。经过研究发现,重力工具面与磁工具面的差角受磁倾角、井斜角和方位角的影响,磁工具面与重力工具面的差角与磁倾角、井斜角、方位角呈现一定的函数关系,用下式表示

式中,I为当地井斜角,°;A为当地方位角,°;D为当地磁倾角,°;DTF为磁工具面与重力工具面的差角,°。
从式(1)可知,磁工具面角与重力工具面角的角差DTF是井斜角I、方位角A和磁倾角D的函数。在向量空间中,任意一个向量可以绕某一轴线旋转到空间的另一个方向,而大小不变。在求解磁工具面与重力工具面关系中,将向量经过多次旋转,最终得到磁工具面与重力工具面的函数关系。
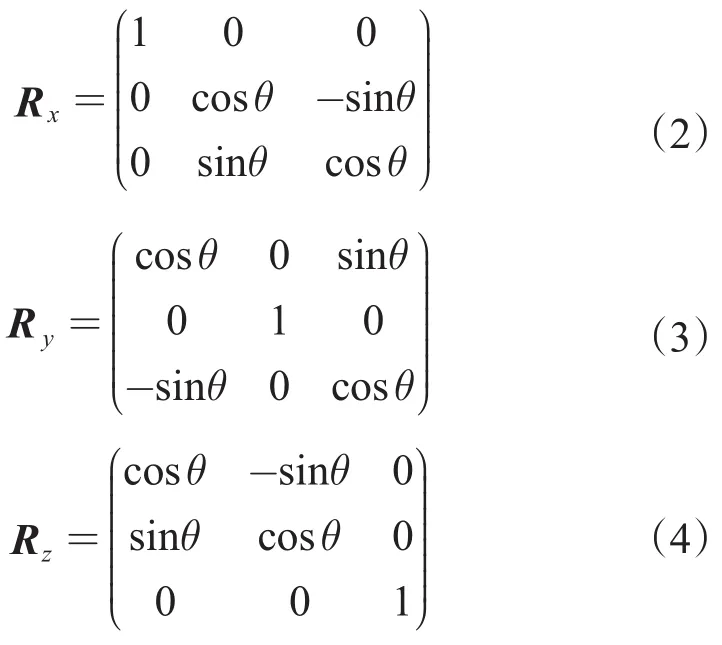
首先介绍向量绕空间坐标轴旋转的相关矩阵。旋转导向工具传感器建立空间坐标系如图1,向量绕轴旋转满足右手螺旋准则,把拇指向下(表示Z轴),手指指向X轴,然后手指自然弯曲方向便是旋转方向。向量绕空间坐标轴X,Y,Z轴旋转角度θ的相关矩阵分别为
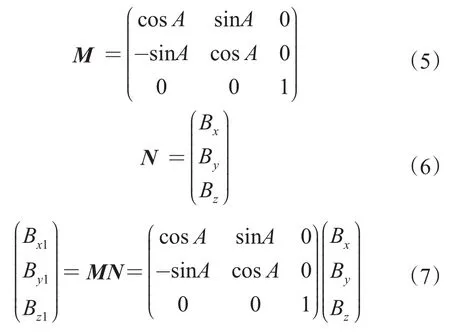
传感器经过空间旋转后,利用以上旋转矩阵,计算得出经过方位旋转后磁通门的输出。Bx1,By1,Bz1由以下方法计算得出。转化关系如图2所示。
计算并化简得出
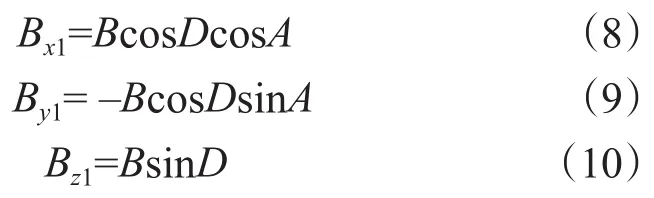
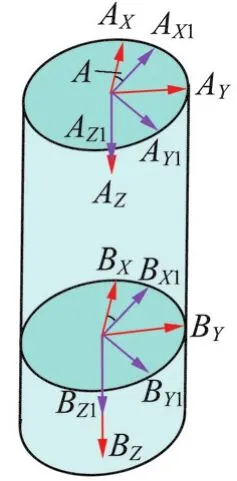
图2 改变方位角A,向量用B1表示情况
同理,得到传感器以Y1轴为轴,改变井斜角I后的Bx2,By2,Bz2结果,转化关系如图3所示。

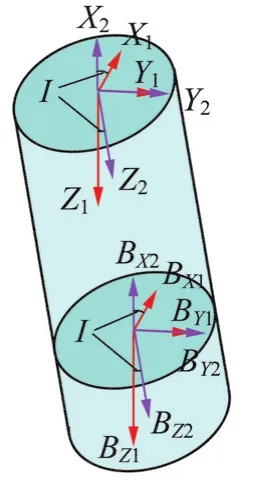
图3 改变井斜角I,向量用B2表示情况
同样,传感器以Z2轴为轴,改变重力工具面GTF后的Bx3,By3,Bz3的结果,转化关系如图4所示。

将Bx2,By2,Bz2代入上式计算得出

由前文得到,MTF=GTF+DTF,两边取正切得
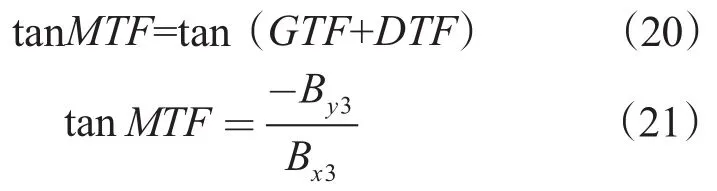
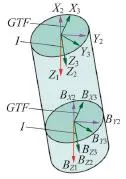
图4 以Z2轴右旋转GTF,向量用B3表示情况
通过三角计算得到了任意时刻MTF、GTF间的函数关系。在传感器旋转中,通过测量磁工具面,对磁工具面进行修正得到旋转导向实时控制用的重力工具面,用于控制执行机构,或应用到多扇区方位测量中。
2 测量方法的验证
上述分析通过定义井下工具传感器的坐标轴以及传感器短节的敏感元件的分布,从理论上推导了任意时刻重力工具面GTF与磁工具面MTF之间函数关系。下面是利用标准定向传感器短节在刻度装置上的不同井斜角I、方位角A的实验数据,通过刻度装置得出标准的I、A以及GTF、MTF参数,依据上述推导计算得出GTF与MTF的差角DTF数据和标准DTF数值对比情况(图5)。
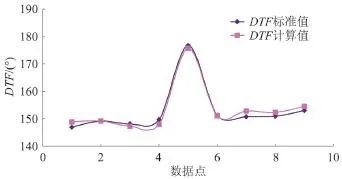
图5 DTF角度差实验数据计算对比图
从图5可以看出,计算得出的DTF与刻度装置得出计算结果DTF标准值非常一致,最大误差为1.98°,实验验证了上述分析的准确。
为了进一步分析该方法现场使用情况,采用标准定向传感器短节进行了现场试验。试验中重力工具面固定在45°左右,进行增斜增方位钻进。将直接利用重力加速度计测量的重力工具面GTF_Dir,利用实时测量磁工具面MTF经上述方法修正得到的GTF_cal,以及在静态测量时的GTF_St分别进行存储,返回回放进行对比分析。图6显示了其中的部分实测数据。从回放的数据来看,加表直接测量的动态GTF_Dir基本围绕在静态测量GTF_St附近5°左右变动,这一数据说明了传统MWD仪器进行滑动钻进时,重力工具面实时波动情况,数据与工程实际吻合。而通过实时测量MTF经修正得到的GTF_cal基本稳定在静态测量的GTF_St左右2°内波动,进一步说明了该方法在钻具振动等动态条件下测量动态GTF的精度高于直接测量的GTF。
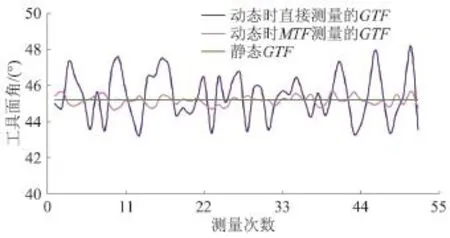
图6 动态工具面对比情况
但当井底钻具转速大于某一转速(ω>60 r/min)连续旋转,同时伴随径向、轴向振动时,测量的实时重力工具面误差就会增加,严重时将无法用于旋转导向工具的控制。
3 结论与认识
在旋转导向工具测控系统中,由于井下钻具的旋转,存在钻具黏滑、离心加速度及井下振动情况,对基于重力加速度计的测量干扰不确定,传统的方法计算实时重力工具面不再适用。文中给出的方法以理论推导为基础,分析了在钻具旋转中实时准确计算重力工具面的方法。利用标准传感器短节在刻度装置及现场对测量计算方法进行了试验验证,为旋转导向测控系统的自主研发提供了一种测量技术方案,具有较强的适用性。
[1]王兴武.塔里木超深井深部井斜控制技术[J].断块油气田,2011,18(1):100-102.
[2]赵金洲,孙铭新.旋转导向钻井系统的工作方式分析[J].石油机械,2004,32(6):73-75.
[3]狄勤丰,张绍槐.旋转导向钻井系统测量技术研究[J].石油钻探技术,1998,26(2):50-53.
[4]郭元恒,何世明,刘忠飞,等.长水平段水平井钻井技术难点分析及对策[J].石油钻采工艺,2013,35(1):14-18.
[5]胡以宝,狄勤丰,李汉兴,等.带旋转导向工具底部钻具组合的动力学特性分析及参数优化[J].石油钻采工艺,2011,33(2):8-11.
[6]牛洪波.大牛地气田长水平段井眼轨迹控制方法[J].天然气工业,2011,31(10):1-3.
[7]杨晓峰,杜晶晶.井眼轨迹连续控制钻井技术研究与应用[J].石油钻采工艺,2012,34(1):10-13.
[8]姜伟,蒋世全,盛利民,等.旋转导向钻井工具系统的研究及应用[J].石油钻采工艺,2008,30(5):21-24.
[9]姜伟,蒋世全,付鑫生,等.旋转导向钻井技术应用研究及其进展[J].天然气工业,2013,33(4):75-79.
[10]远方,巩宪锋,杨静,等.高精度随钻定向测量仪的设计[J].仪表技术与传感器,2011(1):21-23,44.
[11]杨全进,李瑾.旋转导向钻井系统中的一种下行通讯方案[J].油气地质与采收率,2004,11(1):75-77.
[12]刘白雁,王新宇,杜勇刚,等.井斜实时测量方法研究[J].中国测试技术,2007,33(4):5-8,25.
[13]汤楠,霍爱清,汪跃龙,等.旋转导向钻井工具稳定平台控制功能试验研究[J].石油学报,2008,29(2):284-287.
(修改稿收到日期 2013-12-18)
〔编辑 朱 伟〕
A new solution for dynamic direction measurement while down-hole drill string rotating
YANG Quanjin1,2,JIANG Haixu1,ZUO Xin1
(1.China University of Petroleum,Beijing102249,China;2.Drilling Technology Research Institute,Shengli Petroleum Engineering Co.Ltd.,Dongying257017,China)
In order to measure the gravity tool face in a real time and accurate manner during continuous rotation of down-hole drill string,this paper describes the basic parameters of track of hole attitude and basic principle of sensor to measure the attitude parameters in petroleum drilling;focuses on the structure of common directional sensor to measure the hole attitudes and measured parameters;provides a method for dynamic direction measurement while drill string rotation;analyzes in detail how to calculate the angle difference between the magnetic tool face and gravity tool face theoretically based on a principle of vector rotation,and the accuracy of calculation method is verified by experimental results.This method effectively overcomes the disadvantages of the large error in conventional gravity tool face measurements .This paper provides a measurement solution for tool face measurement during rotary steerable tool developing and continuous rotation of drilling tool.
Down-hole tool;drill string rotation;vector rotation;directional sensor;tool face
杨全进,蒋海旭,左信.一种用于井下钻具旋转中动态方位测量的新方法[J].石油钻采工艺,2014,36(1):40-43.
TE21
:A
1000-7393(2014)01-0040-04
10.13639/j.odpt.2014.01.011
国家科技重大专项“低渗油气田高效开发钻井技术”子课题“储层有效进尺最大化钻井技术”(编号:2011ZX05022-003)资助。
杨全进,1975年生。2006年毕业于石油大学(华东)信控学院控制理论与控制工程专业,硕士学位,主要从事钻井随钻测量仪器研究工作。电话:0546-8783944。E-mail:yqj0546@sina.com。
猜你喜欢
科学大众(2022年23期)2023-01-30
中华养生保健(2020年10期)2021-01-18
云南化工(2020年11期)2021-01-14
河北理科教学研究(2020年2期)2020-09-11
凿岩机械气动工具(2016年1期)2016-11-11
试题与研究·教学论坛(2016年16期)2016-07-02
深空探测学报(2016年2期)2016-05-17
小天使·一年级语数英综合(2016年9期)2016-05-14
化工设计通讯(2016年7期)2016-03-12
凿岩机械气动工具(2015年3期)2015-11-11