
面向多路线的智能循迹小车的设计与实现
2014-03-10 05:58:19莫太平杨宏光刘冬梅
自动化与仪表 2014年4期
莫太平,杨宏光,刘冬梅
(桂林电子科技大学 电子工程与自动化学院,桂林 541004)
随着机器人技术的不断发展,人们希望机器人能更加灵活地适应各种工作环境,完成更为复杂的任务,研制能够代替人类在危险、恶劣环境下工作的具有一定自主能力的轮式机器人是当前国内外研究的热点[1]。智能小车即轮式机器人,作为一门新兴的综合技术其内容涵盖机械、汽车、电子、自动控制、计算机、传感技术等多个学科的知识领域,可广泛地应用于工厂自动料车配送、固定场地搬运车等技术领域,也可应用于复杂、恶劣的工作环境,具有良好的民用和军用应用前景[2]。针对普通的循迹小车通常只能够在直道或者弯道上行驶,无法在具有多路线的轨道路径中有选择性地按照某一条引导线行驶,本研究采用AVR单片机控制小车的红外循迹模块和电磁路口检测模块的设计方案,在实现了小车基本的避障、循迹功能外,智能小车还能够在具有多条交叉线路组成的各种三岔路口的循迹轨道中按设定的任意有效行进路线进行定点循迹和多点连续循迹的功能。本文设计的智能小车系统已应用于柳职院的实训物流系统中。
1 系统设计思想
本文设计的智能循迹小车系统采用模块化设计,有利于各个硬件模块的调试与升级,同时也很容易将各个模块安装在智能小车上。该系统由AT-mega128[3]主控制器、红外传感器寻线模块、霍尔传感器电磁路口检测模块、电机模块、红外避障模块、无线通信模块以及电源等模块组成。此智能循迹小车整体设计如图1所示。
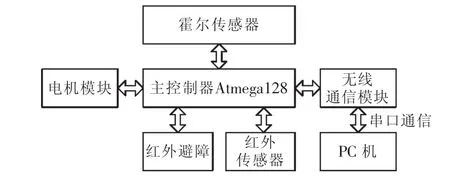
图1 智能循迹小车设计框图Fig.1 Intelligent tracking car design frame
红外传感器寻线模块使用反射式红外线采集路面信息后将循迹信号传送给ATmega128主控制器,实现对黑色引导线的循迹。
霍尔传感器模块用来检测岔路口小磁铁磁场产生的电压信号[4]。如果检测到电压信号后,立即将其反馈给ATmega128主控制器,从而断定小车已处于岔路口上,此后将执行上位机控制器发出的路口转向命令。
无线通信模块使用nRF905[5]无线收发模块,通过MAX232串口通信,实现上位机监控系统与循迹小车系统之间的实时数据通信。无线的通讯方式,使得整个操作流程不需要人工的参与,实现全自动化操作。双向的无线通讯方式,也使得数据传输的准确性大大提高。
电机模块主要由AVR单片机ATmega128处理器、L298直流电机驱动芯片及其相关电路组成。其接收核心控制单元模块的命令,控制智能循迹小车的启动、急停、转弯等操作。
红外避障模块是使用红外探头检测智能小车在循迹过程中前方是否有障碍物。当检测到障碍物时,智能小车能够自动停车并且发出嘟嘟的报警声。
2 智能小车硬件系统主要模块设计
2.1 主控制器

图2 ATmega128单片机电路Fig.2 ATmega128 m icrocontroller circuit
此循迹小车的主控制器选用ATmega128为处理器。ATmega128是ATMEL公司的高效率、低功耗的8位系列单片机,具有先进的RISC结构,非易失性的程序和数据存储器,与IEEE 1149.1标准兼容的JTAG接口。它是一款高配置的单片机,稳定性极高,应用极其广泛。
ATmega128单片机的主要电路如图2所示,其第 7、8、9、12、13、15、16 引脚与 nRF905 无线收发模块相连接,实时接收上位机控制器的指令,进行一定的分析和算法处理后,从5、6引脚发出PWM信号,输出给后面的以L298N为主要器件构成的直流电机驱动电路,Atmega128单片机通过调节PWM信号的占空比实现对电机的调速与转向。第47-51引脚连接红外传感器模块,实现小车沿着黑色引导线行驶。第46引脚用于接收来自霍尔传感器模块输出的电压脉冲信号,实现判断小车是否检测到岔路口。
2.2 红外传感器模块
循迹小车的红外传感器模块使用5对红外反射式光电传感器以“人”字型布局安装在小车前端底部,其布局示意图如图3所示。红外传感器检测到黑色引导线输出为低电平“0”,检测到白色背景输出为高电平“1”。在循迹行驶过程中②③④号传感器均需压在黑色引导线上方。

图3 红外传感器布局示意图Fig.3 Infrared sensors layout diagram
红外传感器模块将小车在循迹行驶的过程中5对传感器输出的高低电平信号实时反馈给单片机,再经过一定的算法处理后,控制直流电机以不同的速度实现小车转向的操作以达到按照规定引导线的行驶。在行驶过程中当小车前进方向与引导线方向发生偏移时,小车能够根据引导线位置自动调整车身以消除偏差,使小车前进方向与引导线方向保持一致。
2.3 霍尔传感器模块
霍尔传感器模块安装在小车的车头底部中央。在引导线交叉的每个三岔路口和需要停车的位置下都安放一枚小磁铁。小车循迹行至岔路口时,当霍尔传感器在小磁铁的磁场中产生电压信号通过LM324的放大处理后反馈给单片机的第46脚,即此时的小车正处于小磁铁上方,也就是位于一个岔路口上,此后将执行上位机控制器发出的路口转向(左转弯、右转弯、直行或停车)命令。霍尔传感器模块原理图如图4所示。

图4 霍尔传感器模块原理图Fig.4 Hall sensors module schematic
2.4 nRF905无线通信模块
无线通讯模块是上位机监控系统与智能循迹小车数据交互的硬件模块。由于所设计的智能小车考虑到其应用在宽阔的场地上,故采用通讯距离能够达到1500m的nRF905为主要芯片的无线通信模块。由AVR单片机控制的nRF905模块与上位机进行远程的数据传输,实时接收上位机信息和反馈循迹小车的行驶状态。nRF905无线通信模块原理图如图5所示。

图5 nRF905无线通信模块原理图Fig.5 nRF905 w ireless communication module schematic
2.5 电机驱动模块
智能循迹小车的运动控制是由单片机控制直流电机驱动电路来实现的。此模块的电机驱动芯片为L298,电机的型号为ASLONG JGA25-370,采用四轮驱动的方式控制小车的行走运动。L298通过光电耦合器接收单片机输出的不同占空比的PWM波形来驱动直流电机,完成直流电机的速度和转向的控制。保证小车平稳地完成循迹过程。
3 循迹路线选择方案
智能循迹小车利用红外传感器模块和霍尔传感器模块能够在由多条复杂的交叉路线组成的各种三岔路口按照上位机监控系统设定的任意有效的行进路线进行定点循迹和多点连续循迹行驶,如引导线交叉的十字路口、丁字路口和7字楼口。即实现在具有复杂的三岔路口路径特征的轨道中行走以完成各种运送任务。
智能小车在接收到上位机监控系统发出的循迹发车指令后,小车开始沿引导线稳定循迹前进,当小车行至第一个岔路口时,即小车头部的霍尔传感器模块检测到第一个磁铁后,将执行上位机控制器预先设定的第一个转向命令,如果接到直行命令,小车不做任何操作直接正常循迹行驶;如果接到停车命令,小车即停止运动状态;如果接到左转命令则控制左右轮电机以不同的速度进行左转弯操作,同时判断红外传感器与引导线的位置关系变化,目的是确定是否完成左转操作,在完成左转弯操作后,小车进入正常循迹状态;由于路口的对称性,右转命令和左转命令相类似。接下来在小车按照上位机监控系统发出的第一个指令完成第一个岔路口的转向操作后,继续循迹前进至第二个岔路口,即霍尔传感器检测到第二个磁铁后,小车按照上位机发出的第二个转向指令进行相应的转向操作,原理同第一个岔路口时的操作类似。以此类推,直到小车到达指定位置并进行停车处理后完成整个循迹过程。
4 智能小车循迹测试
4.1 循迹轨道设计
为研究测试智能小车在具有多路线的循迹轨道中的循迹情况。本文设计了适合此研究的循迹轨道模拟图如图6所示。小车可以按照任意设定好的路线循迹行驶到达指定位置。为简洁说明,图中的编号可以视为路口及其下安装的小磁铁的编号,小车可以在任意编号的路口进行转向和停车操作。小车在接到发车命令后,沿引导线稳定循迹行驶。
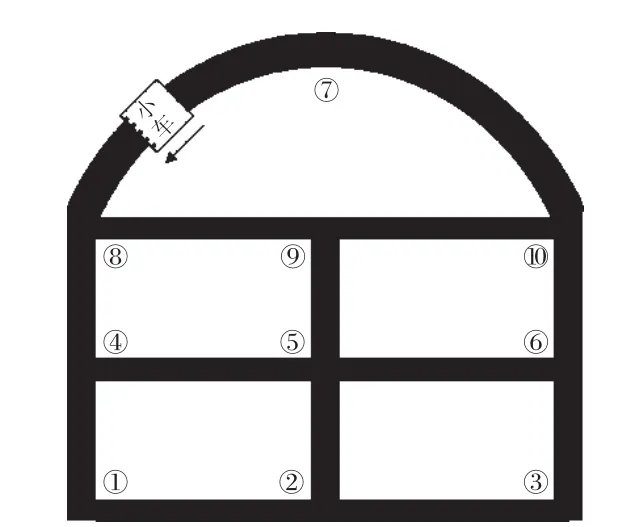
图6 小车循迹轨道模拟图Fig.6 Tracking trajectory simulation diagram
4.2 上位机监控系统的设计及循迹测试
智能小车循迹测试显示界面如图7所示。循迹小车的上位机监控系统主要完成与智能小车间的实时通信,并将设定好的路线命令发送给小车控制器,小车按照此行进路线在模拟的轨道中循迹行走。其中小车路径中用字母L、R、P、S分别表示上位机向小车在检测到路口时发出左转弯、右转弯、停车、直行命令。小车将严格按照设定的路线循迹行走直至完成整个循迹过程。由于小车可以在模拟轨道中按任意有效的行进路线行走。假定小车从图6位置发车,设定小车的行进路线为LRRLLPLLRRLSP。上位机通过无线通信模块将小车在模拟轨道中的行进路线命令发送给小车的AVR处理器,控制小车在轨道中按要求行进。

图7 循迹测试显示界面Fig.7 Interface of tracking test
则小车的循迹过程为:发车→⑧→⑨→⑤→④→①→②(停车),之后继续发车→③→⑥→⑤→⑨→⑩→⑦→⑧(停车)完成了整个循迹过程。
5 结语
本文设计了一个基于AVR单片机的智能循迹小车,可与上位机监控系统实行进行数据通信,并且能够实现在复杂的多路线路径中按要求循迹行驶,实现了小车在平面轨迹地图中自主导航运动。此智能小车为当前企业的智能运输和配送问题,提出了高效可行的解决方案。根据客户的需求,本系统可广泛应用工厂或物流行业的产品智能归类、运输和配送中,经过实际测试验证,该系统可以实现对运送过程全程追踪记录,提高企业工作效率。
[1] 李阅薄,羊彦,陈彦来,等.双电机独立驱动底盘控制算法设计[J].计算机测量与控制,2009,17(3):481-483.
[2] 赵津,朱三超.基于Arduino单片机的智能避障小车设计[J].自动化与仪表,2013,28(5):1-4.
[3] 霍宏伟,牛延超,黄吉莹.ATmega128/2560系列单片机原理与高级应用[M].北京:中国林业出版社,2006.
[4] 张云洲,杨兵,李龙,等.基于电磁效应的轮式智能车导航控制[J].东北大学学报:自然科学版,2013,34(7):917-921.
[5] 吕跃刚,高晟辅,范俊峰,等.基于nRF905无线数传模块的设计及其实现[J].微计算机信息,2006,22(35):274-277.■
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
电子测试(2018年15期)2018-09-26 06:01:14
车迷(2018年12期)2018-07-26 00:42:22
童话王国·文学大师班(2017年6期)2017-07-10 05:54:07
电子制作(2017年1期)2017-05-17 03:54:20
中国老区建设(2016年3期)2017-01-15 13:53:26
山东工业技术(2016年15期)2016-12-01 05:31:14
电子制作(2016年11期)2016-11-07 08:43:49
太空探索(2015年6期)2015-07-12 12:48:42
学习月刊(2015年3期)2015-07-09 03:51:04
