基于单点式力反馈器的虚拟装配研究
2014-03-06 05:42:46卢丽婷
图学学报 2014年2期
卢丽婷, 刘 林, 熊 巍
(华南理工大学设计学院,广东 广州 510640)
基于单点式力反馈器的虚拟装配研究
卢丽婷, 刘 林, 熊 巍
(华南理工大学设计学院,广东 广州 510640)
针对PHANToM Desktop力反馈器工作空间狭小的问题,提出改进的动态空间匹配算法和代理点移出视锥体时的漫游技术。首先分析设备工作空间在三维方向与视锥体的匹配关系,通过对x、y和z轴方向进行空间匹配,实现近视点处操作精度高和远视点处可视范围大;然后利用映射区外的工作空间进行视点漫游,可以扩展虚拟装配可视范围。在虚拟装配过程中,实时地计算代理点与零件间的接触力,并反馈给用户,使用户可以感知零件的几何外形与硬度特性等;同时采取弹簧质点模型计算约束力引导用户进行装配定位。
虚拟装配;力反馈器;动态空间匹配;漫游;接触力;约束力
在虚拟装配应用中,人机交互通常是使用数据手套[1-7];但数据手套无法实现对虚拟物体几何外形的感知,即使是具有力觉触觉反馈功能的数据手套也无法感受装配过程的约束。而单点型力反馈器不仅可以提供感知虚拟物体外形的触觉反馈,还可以提供虚拟装配过程中所需的接触力和导航力反馈。将PHANToM Desktop力反馈器应用在虚拟装配中,要解决的一个重要问题是设备工作空间狭小。对于从设备工作空间到图形工作空间的映射,OpenHaptics API提供了两种空间匹配方法:均匀空间匹配法和非均匀空间匹配法。均匀匹配法将整个视锥体包含在设备工作空间中,这会牺牲掉部分设备工作空间,即代理点有可能会超出视锥体。非均匀匹配法保证代理点不会超出视锥体,可以充分利用设备的工作空间。均匀空间匹配与非均匀空间匹配在各个轴方向匹配的比例系数都是固定不变的,这两种匹配方式均存在以下不足:①在远裁剪面附近可视空间较大,而设备工作空间却较小;在近裁剪平面附近可视空间较小,而设备工作空间较大。②固定的比例系数使代理点在整个虚拟场景中的定位精度一样。在固定比例系数的情况下,大比例系数无法实现虚拟物体的精确定位;而小比例系数则使虚拟场景的工作空间变小。可是虚拟装配系统要求工作空间大和定位精度高,因此定比例系数空间匹配法不能满足装配需求。针对上述问题已经有了一些研究,比如有Ballistics跟踪法[8]和变比例系数法[6]。跟踪法根据HIP的运动速度选择比例系数,速度较大时认为是粗定位,选择较大的比例系数以获得较大的虚拟场景空间;速度较小时认为是精定位,选择较小的比例系数以获得较高的定位精度。但由于比例系数是随着设备的运动而改变的,导致场景空间可能忽大忽小较难控制虚拟物体。在文献[9]中,变比例系数是根据代理点与视点在z轴方向投影的距离d成反比的经验公式计算得出的。这种空间匹配方法可以使得代理点在近视点处具有较高的定位精度,而在远视点处具有较大的运动空间,符合操作者实际装配的习惯,即先将零件进行粗定位,然后将视点拉近以便对零件进行精确定位,完成装配操作。但文献[9]的空间匹配比例系数是凭经验求得的,未能真实反映设备工作空间与图形工作空间之间的映射关系,不符合实际要求。而且它只考虑了XOZ平面上的匹配关系,并没有考虑三维空间的映射关系。另外,当代理点移出视锥体时,它并没有漫游功能。
针对在虚拟装配中要求装配定位精度高和工作空间大的特点,本文提出一种改进的动态空间匹配法和代理点漫游技术。改进的动态空间匹配法是对设备工作空间与视锥体在三维空间上的映射,代理点漫游可以充分利用设备工作空间并扩展虚拟场景的可视范围。另外,通过计算接触力和装配力输出给用户,使用户感受零件的几何外形以及引导装配过程,最后以一个实验示例验证将 PHANToM Desktop 应用在虚拟装配中的可行性与有效性。
1 单点式力反馈器
PHANToM Desktop是一种单点型力觉触觉反馈操纵器(图1)。通过操纵末端手柄可以提供6个自由度的(位移和旋转角度)输入,同时可得到3个位移自由度的力反馈。基于力反馈的交互系统是双向闭环系统(图1),用户通过操纵力反馈器的手柄控制力觉触觉渲染接口点(Haptic Interface Point,HIP)的6个自由度的位姿(包括对x、y、z轴的偏移量和旋转量),通过坐标映射得到在图形坐标系中代理点(HIP在虚拟场景中的映射点,见图1Q点)6个自由度的位姿,再由计算机根据代理点与物体实时的交互状态计算反馈力,输出给力反馈器,使用户感知物体的几何外形以及装配运动约束等。

图1 双向闭环系统
2 三维动态空间匹配与代理点漫游
操作者通过操纵手柄控制 HIP的位姿以达到控制代理点的位姿,即要将设备工作空间与图形工作空间进行映射。
2.1 视锥体与设备工作空间
虚拟环境的可视化空间一般由透视投影生成的视锥体决定,见图2(b),在计算机绘图时,由于显示屏为方形,故从视点出发投射到计算机屏幕一般将视锥体设为四棱椎状。根据文献[10]得知,PHANToM Desktop力反馈设备工作空间是个扇形体见图2(a),该扇形体圆心角110°,外半径250mm,内半径50mm,厚度350mm,工作区域为160mm×120 mm×120mm。
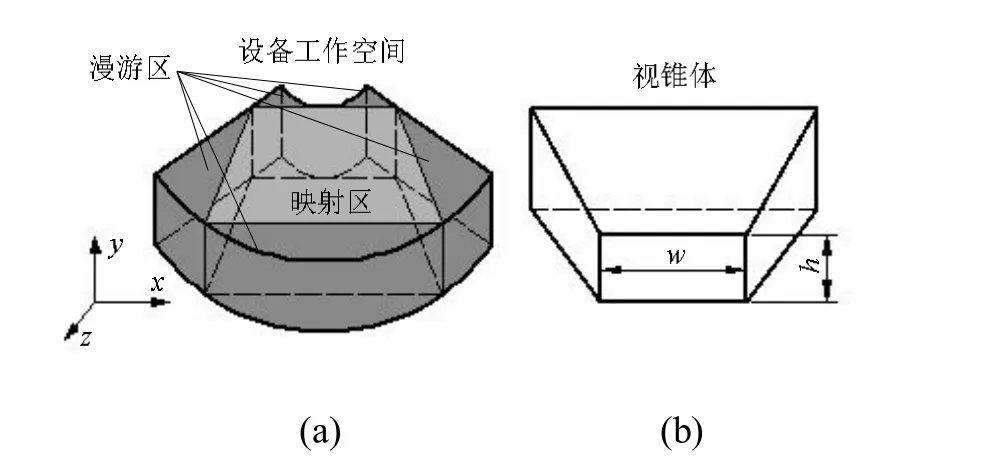
图2 设备工作空间与视锥体
2.2 空间功能区域划分
为了充分利用设备工作空间以及在操作过程中实现视点漫游,将设备工作空间进行功能区域划分。如图2(a)所示,设备工作空间中的梯形柱体区域为代理点映射区,其余区域为代理点漫游区。映射区近端平面大、远端平面小,这正好与视锥体相反。映射区的作用是将设备工作空间中 HIP的位姿映射到虚拟场景中,即映射到视锥体区域内。代理点漫游区作用是当HIP超出代理点映射区时实现对虚拟场景进行前后左右地漫游。先通过均匀空间匹配法获得代理点的位置 P,若 P点在漫游区,则对代理点进行漫游;若其在映射区内,则将点 P映射到视锥体中的点P′。
2.3 空间映射
因为设备工作空间与视锥体在深度方向对齐映射,所以在z轴方向上只要进行固定比例系数匹配;而x轴和y轴方向的变比例系数kx和ky通过以下的映射关系求得。
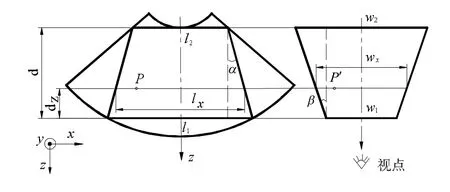
图3 x轴方向映射关系
如图3所示,根据梯形柱体和视锥体在XOZ平面上的映射关系,可知:

其中,l1为映射区前端平面长, l2为映射区后端平面的长。β为视锥体宽度方向的视角的一半,w1为视锥体近裁剪平面宽,w2为远裁剪平面宽,wx为映射点 P'所处裁剪平面的宽。由式(1)~式(3)得比例系数 kx:

如图4所示,设备工作空间与视锥体在YOZ平面上的映射关系。由图可知:
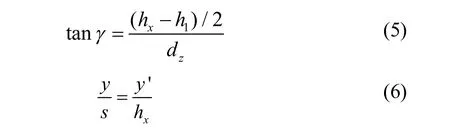
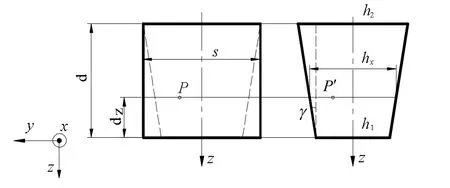
图4 y轴方向映射关系
其中,s为设备工作空间映射区的高,γ为高度方向视角的一半; h1是视锥体近裁剪面高, h2为远裁剪面高, hx是 P'所在裁剪平面的高。由式(5)、式(6)可得出比例系数 ky:

其中,式(4)和式(7)中视锥体参数均可以通过已知的视锥体视角、宽高比、近裁剪平面距离和远裁剪平面距离唯一确定。
由此可以看出位于近裁剪面附近 HIP在设备工作空间移动较大的距离时,对应的视锥体中的代理点移动距离较小,即在近裁剪平面附近定位精度较高,相反在远裁剪平面则可视范围较大,可以粗定位;这符合人的操作习惯。在较大的可视范围内抓取虚拟物体,然后拉近进行精确定位,最后完成装配。同时当代理点移动到设备工作空间的映射区外侧时,可以向左右前后漫游,这样既可以充分利用设备的工作空间,同时扩展虚拟装配的可视范围。
3 反馈力的计算
在虚拟装配过程中,当代理点与虚拟物体接触时,计算机实时地计算接触力反馈给设备的HIP,通过末端手柄传递给用户,使用户感知虚拟物体的几何外形、硬度等。在装配定位的过程中,可以通过计算装配力反馈给用户,起到引导装配的作用。
3.1 接触力
通过计算接触力,阻止力反馈器的控制接口HIP穿透虚拟物体表面,来实现代理点与虚拟物体接触。具体过程是:通过虚拟环境中显示的代理点跟踪HIP的位姿,当代理点与虚拟物体表面接触时,代理点停留在物体表面与HIP在虚拟环境中的点分离。在t1时刻,代理点还未与虚拟物体表面接触,此时将代理点与HIP重合,接触力F为0;在t2时刻,HIP已经穿透物体表面,此时代理点停留在物体表面与HIP分离,它们的距离x即穿透深度,如图5所示,用弹簧质点模型计算接触力的公式如下:

其中,x表示HIP与虚拟物体表面的穿透深度,k为弹簧弹性系数。接触力方向与物体表面法向相同,并指向物体外侧。
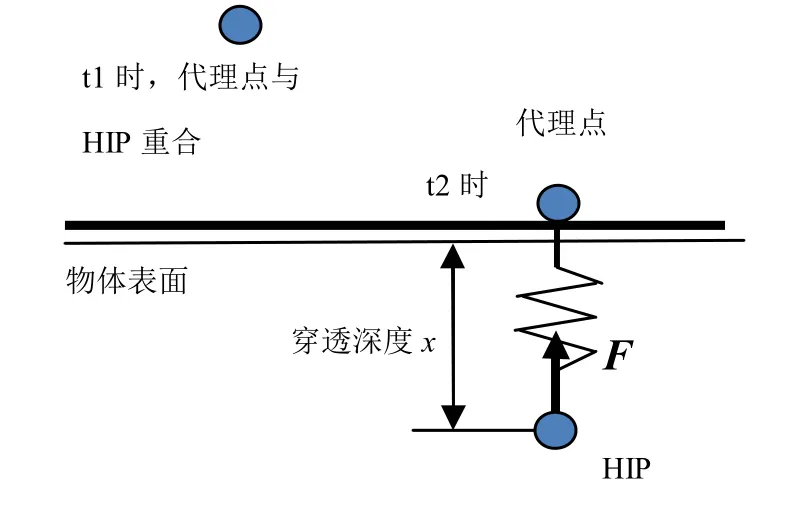
图5 接触力计算模型
3.2 装配引导力
基于力反馈器的虚拟装配过程包括对虚拟物体的拾取、移动、旋转、定位、反馈力导航和释放等操作步骤。其中在定位过程中,如将轴约束在轴线上运动时,用户操纵的HIP位姿可能会偏离轴线位置,此时计算机计算出一个装配导航力输出给PHANToM Desktop的控制接口HIP,阻止用户在操纵控制手柄时偏离轴线轨迹。当将被拾取零件约束在轴线上运动时,其中反馈力F的计算用弹簧质点模型(图6),用式(8)计算,此时x为HIP在轴线垂直方向上与代理点的偏移距离,方向与偏移方向相反。
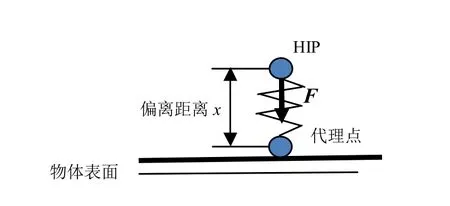
图6 引导力计算模型
4 实验示例
本文在实验过程中所使用的硬件设备包括PHANToM Desktop并口式的单点型力反馈操作器和一台台式计算机。实验程序是在 Visual Studio 2010编译环境下用 C++语言,结合OpenGL图形库、OpenHaptics Academic edition v3.10.5力觉触觉渲染开发包编写完成。如图7所示,(a)代理点拾取轴,平移旋转使其与支架圆柱孔轴线平行;(b)将轴约束在支撑架上的圆柱孔轴线上运动;(c)为最后将轴安放在目标位置。
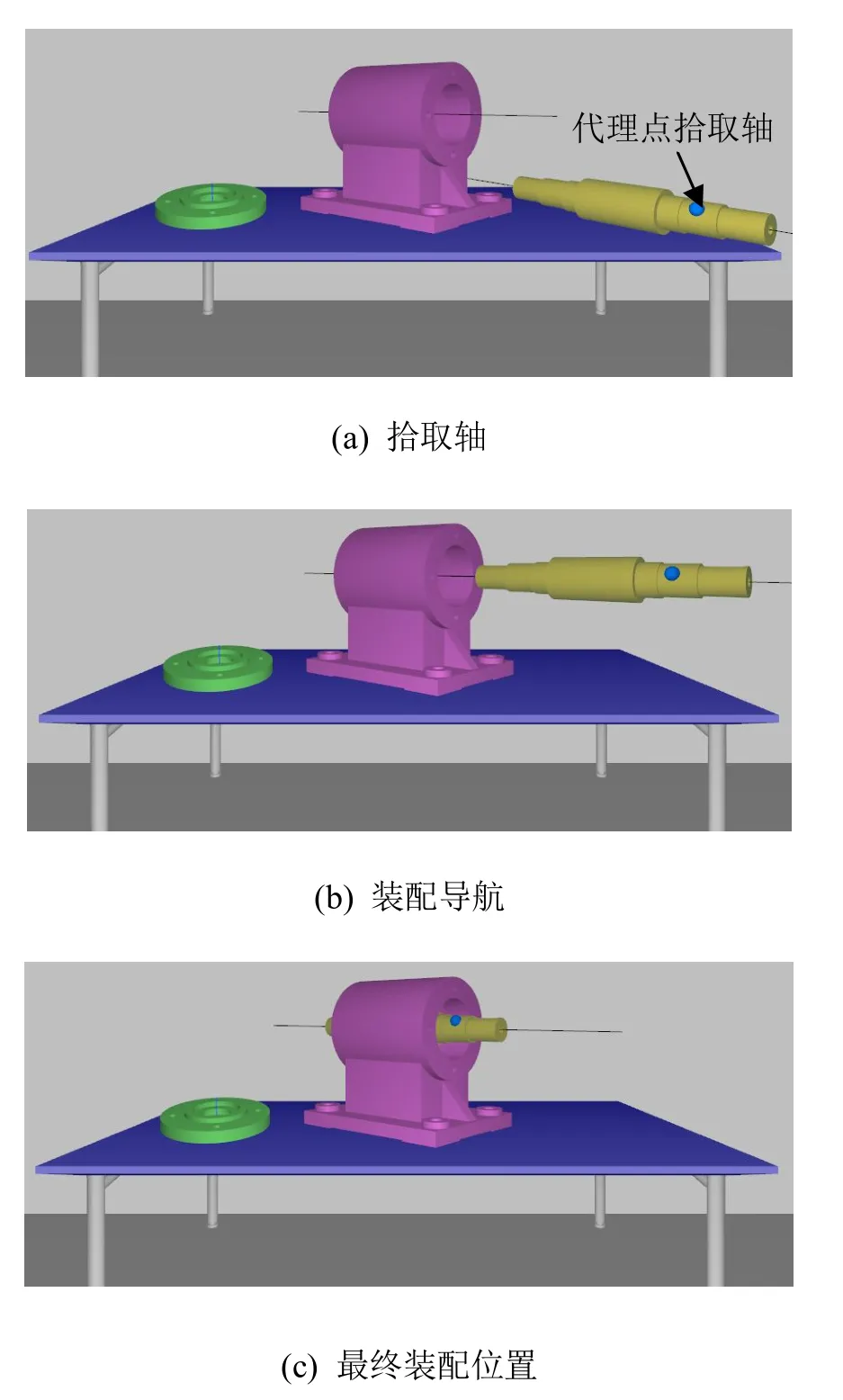
图7 实验示意图
实验测得的空间映射位置关系如图8。
反馈力包括接触力和导航力的应用实验结果如图9。
5 结 束 语
本文通过对PHANToM Desktop力反馈操作器的研究,将其应用在虚拟装配中。针对PHANToM Desktop操作空间小的问题提出改进的动态空间匹配法和代理点漫游技术,充分利用了设备工作空间,同时扩大了虚拟场景可视范围。另外,通过计算接触力模拟代理点接触虚拟物体的过程,以及在定位过程中计算装配导航力引导用户进行虚拟装配,最后通过实验验证将力反馈器应用于虚拟装配的可行性与有效性。因此,通过本文提出的空间匹配算法和漫游技术,能够增强虚拟装配仿真过程的交互性和沉浸感。由于本文只实现了代理点与虚拟物体之间的碰撞检测与反馈力计算,并没有对虚拟物体之间的碰撞力和装配力进行分析。因而在本文研究的基础之上,后续将对物体与物体之间的碰撞和受力状态进行研究。

图8 实验测得空间映射位置关系图
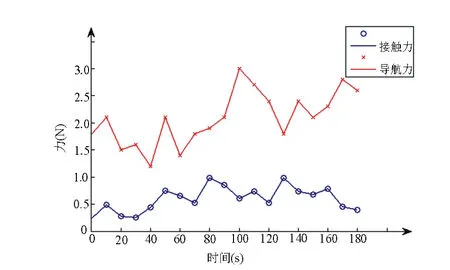
图9 抓取零件过程中受力大小
[1] 曾芬芳, 梁柏林, 刘 镇, 王建华. 基于数据手套的人机交互环境设计[J].中国图象图形学报, 2000, 5(2): 153-157.
[2] 郑 轶, 宁汝新, 唐承统, 上官景昌. 虚拟装配环境中的人机交互技术研究[J]. 北京理工大学学报, 2006, 26(1): 19-22 .
[3] 刘江省, 姚英学, 李建广, 夏平均, 刘国华.虚拟装配中基于数据手套的虚拟操作研究[J]. 系统仿真学报, 2004, 16(8): 1744-1747.
[4] 熊 巍, 刘 林. 基于Vega的数据手套交互控制模块的设计与实现[J]. 工程图学学报, 2009, 30(1): 53-58.
[5] 朱理劲, 刘 林. 机械产品虚拟装配智能导航技术的研究[J]. 工程图学学报, 2009, 30(5): 183-187.
[6] 杨文珍, 高曙明, 万华根, 朱振华, 骆 阳. 基于物理的虚拟手抓持力觉生成与反馈[J]. 计算机学报, 2005, 28(6): 959-964.
[7] 杨文珍, 高曙明, 万华根, 刘玉生, 陈文华. 基于人手指力学特性的虚拟手接触力生成[J]. 浙江大学学报(工学版), 2008, 42(12): 2145-2150.
[8] Salisbury K, Conti F, Barbagli F. Haptic rendering: introductory concepts [C]//IEEE Computer Graphics and Application. Washington DC: IEEE Computer Society Offices, 2004: 24-32.
[9] 陈成军. 基于力觉、触觉反馈的虚拟装配系统相关技术研究[D]. 济南: 山东大学, 2008: 47-51.
[10] 岳龙旺, 王树新, 曹 毅, 贠今天. 显微外科手术机器人协同工作空间分析[J]. 中国机械工程, 2005, 16(20): 1851-1855.
Desktop Haptic Virtual Assembly
Lu Liting, Liu Lin, Xiong Wei
(School of Design, South China University of Technology, Guangzhou Guangdong 510640, China)
Since the workspace of PHANToM Desktop is not big enough, an improved method of dynamic space matching and a viewpoint navigation technique whenever the proxy moving outside the frustum are proposed in this paper. Firstly, the three-dimensional space matching is considered when the device space is matched with the view frustum, so that a high operating precision near the viewpoint and a large visual range at the far viewpoint area is implemented. Then the workspace outside the mapping area in device space is elaborately utilized for viewpoint navigation, so the bigger visual range can be obtained. During the virtual assembly process, the contact force computed real-time can be applied to perceive the shape and hardness of virtual objects for users. Additionally, the constraint force generated according to mass-spring model can be used to locate parts.
virtual assembly; haptic manipulator; dynamic space matching; navigation; contact force; constraint force
TP 391.4
A
2095-302X (2014)02-0280-05
2013-08-14;定稿日期:2013-09-05
卢丽婷(1988-),女,福建永定人,硕士研究生。主要研究方向为虚拟现实技术。E-mail:luliting525@126.com
刘 林(1960-),男,湖南株洲人,教授,研究生导师。主要研究方向为计算机图形学、虚拟现实技术。E-mail:liuling@scut.edu.cn
猜你喜欢
重型机械(2019年3期)2019-08-27 00:58:48
物理实验(2019年4期)2019-05-07 03:36:38
测控技术(2018年5期)2018-12-09 09:04:28
电子制作(2018年9期)2018-08-04 03:31:12
意林·少年版(2018年10期)2018-05-30 16:24:42
百科探秘·航空航天(2016年6期)2016-12-01 11:44:34
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:55
系统工程与电子技术(2016年2期)2016-04-16 05:16:51
中国中医药现代远程教育(2014年23期)2014-03-01 04:33:37
早期教育(家庭教育)(2009年9期)2009-10-20 04:28:58