
卫星激光测距用于GNSS星历精化的现况与发展──GNSS导航信号的收发问题之九
2014-03-01 08:52刘基余
数字通信世界 2014年12期
刘基余
(武汉大学测绘学院,武汉 430079)
导航讲座
卫星激光测距用于GNSS星历精化的现况与发展──GNSS导航信号的收发问题之九
刘基余
(武汉大学测绘学院,武汉 430079)
卫星激光测距是校验导航卫星微波定轨的最佳外部基准,而被现行的GLONASS、北斗、Galileo、QZSS和IRNSS导航卫星所应用。本文综述了卫星激光测距用于GNSS星历精化的现况与发展,进而详细论述了激光定轨解算方法,及其对GNSS星历的精化。
卫星激光测距;星载激光后向反射镜阵列;GNSS星历
导航卫星在轨位置的误差大小,直接影响运动载体7维状态参数的测量精度;因此,如何精确测定导航卫星的轨道参数,准确地预报导航卫星的运行轨道,是实现高精度导航定位的关键问题。毫米级精度的卫星激光测距成果,是校验导航卫星微波定轨的最佳外部基准,而能够评定导航卫星的星历精度,监测导航卫星的星钟运行优劣,提供导航卫星坐标系的大地测量基准,计算导航坐标系的精度因子;因此,被现代的导航卫星广为采用;现行的GLONASS全球导航卫星系统、北斗卫星导航系统(区域性覆盖星座)、Galileo全球导航卫星系统、QZSS准天顶卫星系统和IRNSS印度区域导航卫星系统,都给他们的在轨导航卫星装配了星载激光后向反射镜阵列(Satellite-borne Laser Retroreflector Array),以便进行卫星激光测距(SLR=Satellite Laser Ranging),实施导航卫星的激光定轨;2019年将发射的GPS III卫星也将步其后尘而行之。本文综述了卫星激光测距用于GNSS星历精化的现况与发展。
1 GNSS星载激光角反射器的概况
星载激光后向反射镜阵列(又称为星载激光角反射器),是一种无电功率需求的卫星有效载荷,它作为地面卫星激光测距仪对该颗卫星进行激光测距的合作目标(如图1所示;该图也说明了卫星激光测距的基本原理),进而精确测定该颗卫星的轨道参数,为精化GNSS星历提供基准数据,为对地观测卫星能够准确地获取灾害、资源和全球变化等科学信息而提供数据处理基准。
1.1 GPS卫星揭开了激光定轨的序幕
1989年8月21日至8月25日,在中国宇航学会于北京召开的首届应用卫星与卫星应用研讨会上,笔者在题为“国际导航卫星近况与中国发展设想”大会报告中,首次提出了给所有导航卫星装配星载激光后向反射镜阵列,以便激光定轨测量和地球动态效应参数测量的建议(详见文献[1])。四年后,美国才进行相关试验,而于1993年8月30日发射了一颗装配了星载激光后向反射镜阵列(又称为星载激光反射器)的GPS卫星,即GPS-35(PRN05)号卫星(已于2009年4月撤离了服务);1994年3月10日发射的另一颗装配了星载激光反射器的GPS卫星,即GPS-36(PRN06)号卫星。GPS-35/36(PRN05/06)号两颗卫星,是在其发射天线阵列的边缘,设置着由32块角反射棱镜组成的激光后向反射镜阵列(如图1所示)。美国的Haleakala、英国的Herstmonoceux和奥地利Graz三个SLR站自1993年至1995年对GPS-35/36号卫星的激光测距结果表明,用GPS国际公用星历IGS、美国国防制图局星历DMA和GPS广播基准星历OCS等三种星历算得的站星距离与卫星激光测距成果相比较,其较差分别为9.6cm/12.7cm,48.2cm/45.6cm,115.8cm/151.6cm,即,仅用5个跟踪站算得的OCS星历精度最低,用34个跟踪站算得的IGS星历精度最高。由此可见,为了获得较高精度的导航卫星广播星历,其地面观测站宜于分布在全球东南西北地区,即,地面定轨观测网的覆盖面积越大,越有益于导航卫星广播星历精度的提高。2006年5月22日至7月24日,ILRS观测网对GPS-35/36两颗卫星的卫星激光测距成果再次表明,上述结论的正确性。该次观测成果是采用了如图2所示的14个SLR观测站(含中国长春站);其结果表明,GPS-35卫星的SLR定轨与IGS定轨相比较,径向误差为2.24cm,切向误差为23.81cm,法向误差为47.25cm;GPS-36卫星的SLR定轨与IGS定轨相比较,径向误差为2.03cm,切向误差为9.55cm,法向误差为25.75cm。而IGS定轨是由如图3所示的分布在全球的观测站测定的。在GPS现代化的进程中,美国航空航天局(NASA)要求,给将于2019年始发的GPS III卫星装备星载激光后向反射镜阵列,现已按照这个要求进行了相关研制;它由口径为40mm的48块角反射棱镜构成,其尺寸为10in×12in×2.5in。但是,现行的GPS卫星都没有装备星载激光后向反射镜阵列。

图1 GPS-35/36卫星激光后向反射镜阵列和对它测距的卫星激光测距仪原理框图

图2 2006年14个SLR观测站分布图
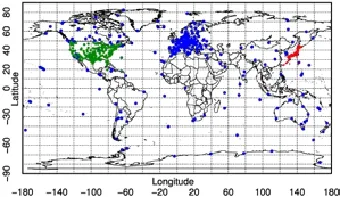
图3 IGS全球观测站分布图
卫星激光测距的第一步,是捕获在视激光卫星,进而跟踪其运行,不断测量地面观测站至激光卫星之间的距离。卫星激光测距技术,是一种典型的主动式定位法——既发射测距信号,又接收从合作目标反射回来的该测距信号。从图1可见,以电子计算机为主体的跟踪控制系统,根据所输入的待测卫星方位角和出现时间之预报值,自动地照准所升起的该颗卫星,同步地跟踪该颗卫星的运行。当仪器照准激光卫星后,固体激光器(例如掺铷钇铝石榴石─Nd:YAG激光器)便按预定指令发射激光脉冲,其极少能量为主波取样电路(常用光电二极管)所截获,经光电转换而形成一个基准信号,称之为主波;它启开时间计数器,开始计数。激光器所输出的绝大部分能量,通过曲折光路而射达位于跟踪转台的发送光学系统,并由后者将激光脉冲射向激光卫星。照射在星载激光反射器上的激光脉冲,沿着入射方向而反射回到位于地面测站上的卫星激光测距仪,为其跟踪转台上的接收光学系统所接收,并送到光电倍增管,后者将这个返回到仪器的激光脉冲转换成电脉冲,通常称之为回波(被测信号)。它经过回波放大器放大以后,被送到时间计数器,而中止计数。激光脉冲往返于地面测站和激光卫星之间的传播时间,等于主波启开计数器和回波关闭计数器的时间之差,由此可算得仪器至激光卫星的瞬时距离值,进而依据它和激光卫星的在轨位置解算出测站的三维位置。其水平位置精度已达到±2cm,垂直分量精度已达到±1cm;而且定位精度还在进一步提高;反之,如果SLR观测站的三维位置精确已知,依此和SLR观测值,即可解算出激光卫星的在轨位置,下文将作详细论述。
1.2 GLONASS卫星的激光定轨
自1995年12月由24颗卫星构成的GLONASS星座运行以来,GLONASS地面监控系统的监测站仅设置在前苏联境内,以致GLONASS卫星的广播星历精度较低,而依靠对GLONASS卫星的卫星激光测距成果精化GLONASS卫星的星历,它们所用的由112块角反射棱镜构成的星载激光后向反射镜阵列如图4所示。
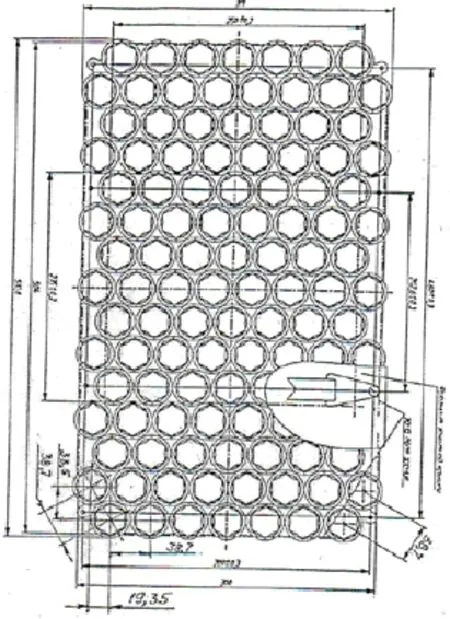
图4 GLONASS星载激光后向反射镜阵列
俄罗斯的卫星激光跟踪网由下列6个SLR观测站构成:Schelkovo,Altai,Komsomolsk,Archyz,Baikonour,Maidanak,它们的分布位置如图5所示。各个SLR观测站上所设置的卫星激光测距系统包括测距、测角和光度测量等三个子系统,图6是卫星激光测距系统的外形结构,它的发射物镜孔径直径为350mm,接收物镜孔径直径为600mm。而其测距子系统的测距精度为5mm~10mm,测角子系统的测角精度是1arcsec,光度测量子系统的测量精度为0.2个星等。

图5 GLONASS卫星的激光定轨观测站分布

图6 Altai观测站上的SLR系统外形结构
1998年10月19日~1999年4月19日,国际大地测量协会(IAG)、国际GPS服务中心(IGS)、美国导航研究所(ION)和国际地球自转服务中心(IERS),共同组织了一次GLONASS/GPS国际大联测,称之为国际GLONASS试验(IGEX-98)。该次大联测,在俄罗斯、美国、法国和中国香港、中国台湾等26个国家和地区布设了61个GLONASS观测站;国际激光测距服务中心(ILRS)也参加了GLONASS/GPS国际大联测,它组织了中国、美国、日本和澳大利亚等15个国家30台卫星激光测距仪,对9颗GLONASS导航激光卫星进行了激光测距。美国得克萨斯大学等四个单位,还用对GLONASS卫星的激光测距数据,独立地计算了9颗GLONASS工作卫星的精密星历。其结果表明,用GLONASS微波测量数据所解算的GLONASS卫星轨道(简称为微波轨道)与用卫星激光测距数据所解算的GLONASS卫星轨道(简称为激光轨道)之较差,其法向/切向较差均在1m左右,而径向较差约为20cm。这说明,用GLONASS信号接收机测量数据解算的卫星在轨位置,可以达到较高的实际精度。61个GLONASS观测站测量数据的集成解算结果进一步说明,GLONASS卫星的在轨位置达到了20~50cm的精度。由此看来,GLONASS测后星历精度是较高的。
据http://www.ipa.nw.ru/conference/wpltm2012报道,俄罗斯联邦计划“GLONASS系统的维护、发展和应用”项目中拟定,将在2020年前建设一个名为“Laser GLONASS”系统,力图以此实现超高精度的卫星导航定位测量,达到厘米级精度的星历播发和微微秒级精度的定时。它在GLONASS卫星上,既安设星载激光角反射器,又设置星际激光导航链路(又称为“星际激光导航和通信系统ISLNCS”,如图7所示)。在传统的卫星激光测距(笔者称之为GLONASS Laser)基础上,增设了星载单程激光测距设备(如图8所示)。

图7 GLONASS-M星载激光角反射器和星际激光导航链路

图8 用卫星激光测距仪将时间传递到远程地面控制站
1.3 Galileo卫星的激光定轨
2005年12月28日和2008年4月27日,欧洲航天局分别成功地发射了带激光后向反射镜阵列的试验卫星GIOVE-A和GIOVE-B,它们的星载激光后向反射镜阵列及其基本参数(如图9和表1所示,未来的27颗Galileo工作卫星均将装备星载激光后向反射镜阵列)。试验卫星目的在于:一是验证星载铷钟、导航信号发生器以及整个导航有效载荷设备链的有效性;二是验证Galileo信号设计中创新设计的性能指标,其中包括验证用户接收机及其在真实静态与动态条件下抗干扰和抗多路径效应的能力,以便更好地评估这些接收机对导航业务和未来应用的影响;三是测量Galileo星座所处23 260km中圆轨道的辐射环境特性,了解这一特定轨道的辐射剂量和电磁场环境,对未来实用工作卫星的研制非常重要。为了完成上述任务,欧洲航天局已在全球部署了由10个地面激光测距站和13个监测站组成的GIOVE地面监控系统,并在荷兰Noordwi欧洲航天技术中心(ESTEC)建立了一个GIOVE信息处理中心,负责处理GIOVE-A/-B卫星的试验成果。
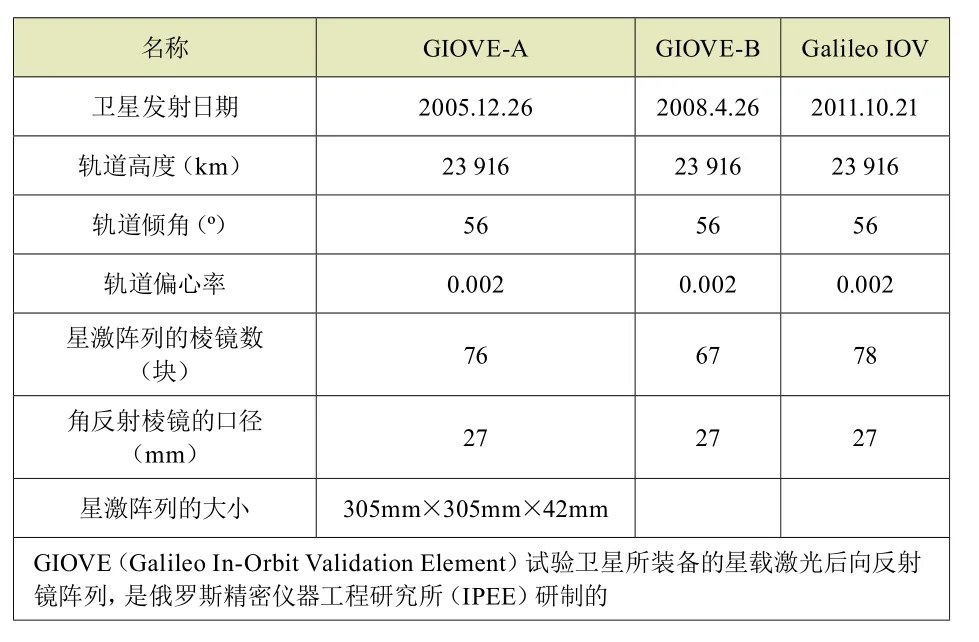
表1 Galileo星载激光后向反射镜阵列的基本参数
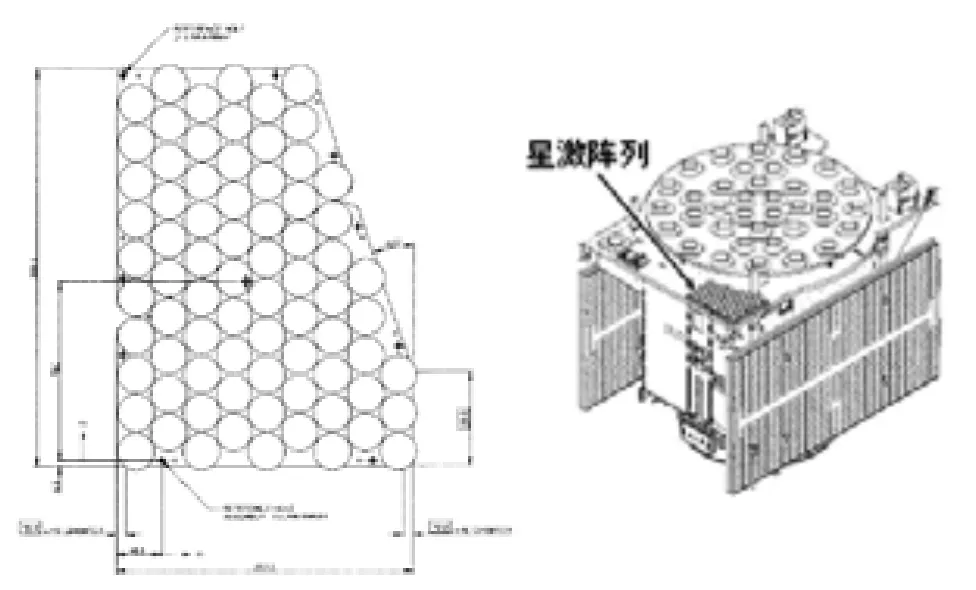
图9 Galileo星载激光后向反射镜阵列及其在星位置
2006年5月22日至7月24日,国际激光测距服务中心(ILRS)采用如图2所示的14个SLR观测站分布的观测网,不仅对GPS-35/36两颗卫星进行了卫星激光测距,而且对GIOVE-A试验卫星也进行了卫星激光测距。其成果表明,GIOVE-A试验卫星的10天轨道相对于30天轨道之较差是,径向误差为8.96cm,切向误差为45.64cm,法向误差为37.46cm。
1.4 北斗卫星的激光定轨
2007年4月14日4时11分,我国在西昌卫星发射中心成功地发射了第一颗中轨工作卫星(北斗-M1),它也装备了星载激光后向反射镜阵列,它是一个31.6cm×28cm,重2.5kg的六角形阵列(如图10所示),该阵列由42个角反射棱镜组成,每个射棱镜的口径为33mm。次年,北斗-M1卫星被列入国际卫星激光测距服务组织(ILRS)的国际联测卫星系列之中,这是我国首颗加入国际卫星激光测距联测的卫星。中国国家天文台利用通过中阿合作设置在阿根廷圣胡安大学天文台的60cm接收物镜口径的第三代高精度卫星激光测距仪,自2008年12月开始观测北斗-M1卫星;此外,长春、上海、武汉和北京的SLR观测站也观测到了该卫星。

图10 北斗MEO卫星和GEO/IGSO卫星的星载激光后向反射镜阵
北斗-GEO和IGSO卫星所装备的星载激光后向反射镜阵列,与北斗-M1卫星所装备的六角形星载激光后向反射镜阵列相似,仅其尺寸和重量不同,即前者是一个49cm×43cm,重5kg的六角形阵列,该阵列由90个角反射棱镜组成,每个射棱镜的口径也是33mm。为了更好地观测北斗-GEO和IGSO卫星,上海天文台还于2008年在北京建设了一个新的SLR观测站,该站上的卫星激光测距仪采用了0.21m发射物镜孔径和1m接收物镜孔径,它的外型结构如图11的右边中图所示。自2009年9月9日以来,上海天文台利用该台卫星激光测距仪昼夜都成功地观测了北斗GEO/IGSO卫星,提供了优良的SLR定轨数据。图11中间上图所示的云南天文台1.2m望远镜,是目前国内孔径最大的地平式天文光学望远镜,经过一定的改进,具有月球激光测距能力。图11右边下图所示的地处南美洲的中阿站,是中国科学院国家天文台与阿根廷国立圣胡安大学Felix Aguilar天文台于2005年建立的中阿合作SLR观测站;该卫星激光测距仪的接收望远镜孔径为600mm,发射望远镜孔径为160mm,采用了被动锁模倍频Nd:YAG激光器,可输出波长为532nm的绿色激光,它的脉冲宽度为30ps,脉冲重复频率为10Hz,而具有优良的激光测卫能力。
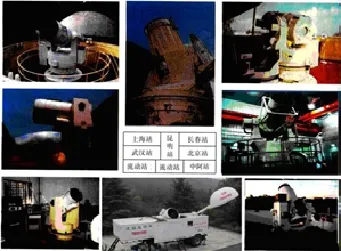
图11 中国的SLR观测站及其仪器
图11中下图所示的流动站,是武汉地震研究所于2010年研制成功的TROS-1000流动式卫星激光测距仪(简称为SLR流动站),该流动站采用1m孔径的接收物镜,1000Hz的激光脉冲发射频率,能够对远达36 000km的GEO卫星实施激光测距,而且具有白天的激光测距能力。自2010年以来,先后在湖北和山东等省对北斗MEO,GEO,IGSO卫星等多种激光卫星进行了昼夜激光测距,达到了±1cm左右的平均点精度。这为北斗卫星的精密定轨提供了有力支撑。
1.5 QZSS卫星的激光定轨
日本耗资22亿美元建设的区域性卫星导航系统准天顶卫星系统(QZSS),是由3颗运行在3个不同的倾斜地球同步轨道(IGSO)的导航卫星组成的。该系统的每颗卫星在日本上空工作8小时,3颗 QZSS卫星轮换出现在日本上空,从而保证总有一颗QZSS卫星在日本的“天顶”上运行。2010年9月11日,日本发射了首颗导航卫星“准天顶”卫星一号,称之为“指路号”(MICHIBIKI)卫星;其近地点是32 000km,远地点为40 000km,轨道倾角为45º,偏心率是0.099,卫星的设计寿命为12年。“指路号”卫星除了装备了卫星导航设备外,还装备了下列附加设备(如图12示):由56块角反射棱镜构成的星载激光角反射器;卫星时间和频率双向传输(TWSTFT)设备;星载L1增强信号发送设备;星载监控相机,能够为用户提供影像等项服务(现已拍摄到了地球的清晰照片)。

图12 QZSS卫星及其星载激光角反射器
1.6 IRNSS卫星的激光定轨
印度政府于2006年5月9日正式批准建设的印度区域导航卫星系统(IRNSS),将由7颗卫星(3颗静地卫星(GEO)+4颗大椭圆轨道卫星(GSO))及其地面监控系统和用户接收机组成。3颗静地卫星分别定点在东经34º,东经83º和东经131.5º上空;4颗GSO卫星分别在两个轨道上运行,其远地点为24 000km,近地点为250km,轨道倾角为29º。估计研发、制造和发射7颗卫星的投资需要3.5亿美元(160亿卢比)。印度声称,该系统将完全由印度控制,所有IRNSS星座、地面控制系统和用户接收机的研制和生产都由印度自主完成,这项工程的实施预计将会给印度航天部门和工商企业带来巨大的技术挑战和商机。印度已于2013年7月1日成功地发射了首颗导航卫星IRNSS-1A(其余卫星分别命名为IRNSS-1B,-1C,-1D,-1E,-1F,-1G);这些卫星的设计寿命为10年~12年。IRNSS-1A卫星装备了两个有效载荷——导航有效载荷和测距有效载荷(两者分别产生GPS L5波段(1176.45MHz,带宽为24MHz)和S波段(2492.028MHz,带宽为16.5MHz)的导航信号),以及三个高精度铷原子钟和用于卫星激光测距的星载激光角反射器。有效载荷的设计,考虑到了与GPS和Galileo系统的互操作性和兼容性。在第一颗卫星成功入轨运行后,计划每隔几个月依次发射其余6颗导航卫星,2014年4月23日发射了第二颗卫星(IRNSS-1B);争取在2016年年底前完成由7颗卫星组成的IRNSS星座的部署(如图13A所示)。它们所用的星载激光角反射器如图13B所示,并附有星激光测距站对IRNSS卫星测距的简略示意图。

图13 IRNSS星座及卫星测距示意图
2 星载激光测距的定轨算法
卫星激光测距精化GNSS星历,关键在于精确地解算出所测卫星的在轨位置。此处论述它的实用算法,为方便论述,而将载有激光角反射器的GNSS卫星,称之为导航激光卫星。

图14 卫星激光测距仪所测的站星距离与地心距的关系
若在地球表面上的P1和P2测站上各设一台卫星激光测距仪,它们在赤道坐标系中的站坐标分别为X1Y1Z1和X2Y2Z2。导航激光卫星S在相同坐标系内的实时点位坐标为XSYSZS(如图14所示),则知导航激光卫星S在时元t的点位坐标是:
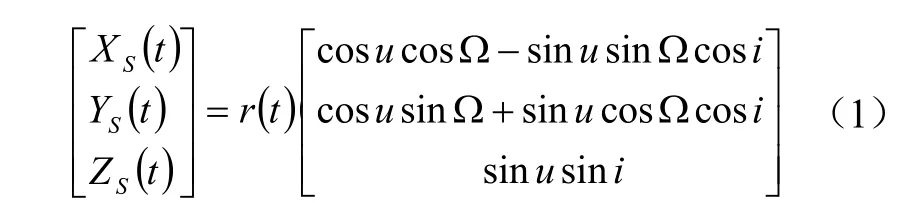
式中,r(t)为导航激光卫星S在时元t的地心距;为卫星轨道的升交点赤径;I为卫星轨道的倾角;为导航激光卫星的近地点角距;F为导航激光卫星在轨道平面内的真近点角。(以上各参数的意义,请见笔者文章“导航卫星的正常轨道及其描述──GNSS卫星的运行轨道之一”,2013年第2期《数字通信世界》P.49~55)。
地面卫星激光测距站的站坐标为:

式中,R是第i个SLR测站的地心距;λiφi为第i个SLR测站的地心经纬度;地方恒星时Si=S0+λi,此处S0为格林尼治恒星时。
第i个SLR测站在时元t测得至导航激光卫星S的站星距离ρim(t),其观测误差为Vi,而该测站在时元t至导航激光卫星S的真实距离ρi(t)。因此,卫星激光测距的误差方程是:
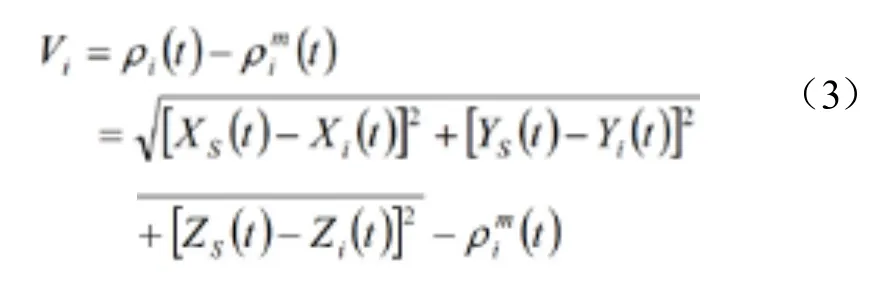
为了书写方便,下列论述中,忽略下标i和时间变量t,而以λφR和6个轨道参数为变量,按台劳公式展开上式中的第一项,取其一阶项而得:

式中,a为卫星轨道的长半轴;e是卫星轨道的偏心率;M0为导航激光卫星在时元t0的平近点角。采用从它处获取的λφR和ΩωfaeM0近似值,作为它们的初始值而按下式计算出站星距离,并将它记作ρc

式中,XS0YS0ZS0是用6个轨道参数算得的导航激光卫星在轨点位坐标,或者采用其他途径取得的测量成果;X0Y0Z0为由λφR初始值算得的SLR测站坐标,也可用GPS卫星定位网测定的该测站坐标。
现在导出式(4)中的各个偏导数,考虑到站星距离


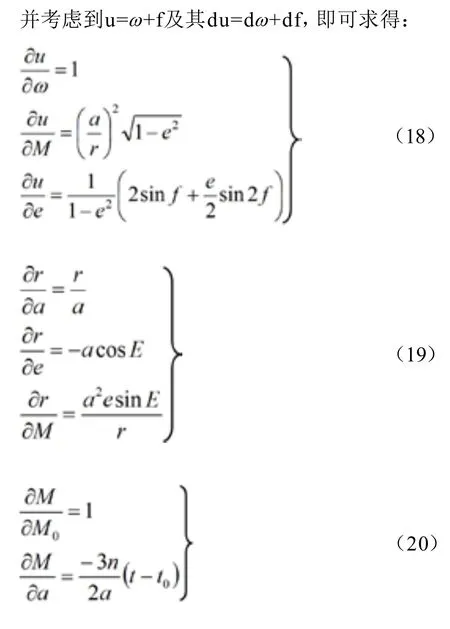
依据式(7)~(20),求得误差方程式(7)的各个偏导数,且分别以下述符号示之:


对于一系列的卫星激光测距观测值ρm,则可得到一系列的如式(22)所示的误差方程式,进而列立出下列相应的法方程式:

采用导航激光卫星轨道参数的初始值或其在轨点位坐标,以及SLR测站坐标与卫星激光测距的观测成果,可按式(16)和式(21)计算出误差方程式的各个系数,进而按式(23)解算出∆λ,∆Φ,∆R,∆a,∆e,∆i,∆Ω,∆ω,∆M0各个修正量,而求得

以上列各值作为新的初始值,按式(22)重新计算出误差方程式的各个系数,进而作迭代计算,直至各个修正量收敛为止。依此便能够求得导航激光卫星的6个轨道参数,进而实施对GNSS星历的精化;在实际应用中,并非上述论述中的两个卫星激光观测站,而是卫星激光观测网中的多个卫星激光观测站对同一颗导航激光卫星进行激光测距,因此,能够求解出更高精度的6个轨道参数,达到精化GNSS星历的目的。
3 结束语
现行的GLONASS、北斗、伽利略、QZSS和IRNSS导航卫星,都装备了星载激光角反射器,而能够由地面卫星激光测距观测网对它们进行激光测距,进而按照相关的数据处理软件解算激光测距成果,求得高精度的导航激光卫星在轨参数,达到精化GNSS星历的目的。此外,2020年左右,GLONASS系统,将从现行的GLONASS Laser发展成为Laser GLONASS,GPS III卫星也将装备星载激光角反射器,实施星载激光定轨测量。
近年来,国际GNSS服务局(IGS)组建了一个MGEX(Multi-GNSS Experiment)观测网(如图15所示),它能够为北斗、Galileo和QZSS卫星提供导航信号验证等多项服务。例如,它给出了2013年春季对北斗IGSO-5和MEO-3两颗卫星所进行的卫星激光测距残差图(如图16所示),以及2012年夏季开始对4颗Galileo IOV卫星所进行的卫星激光测距残差图(如图17所示)。用卫星激光测距成果的解算所得的北斗卫星径向位置精度(RMS)为±0.5m~0.7m,这为我们利用卫星激光测距成果精化两者的星历,提供了全球数据参考。
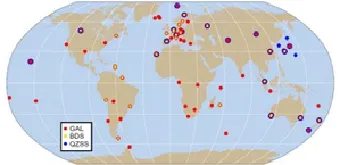
图15 国际GNSS服务局(IGS)的MGEX观测网

图16 北斗IGSO-5和MEO-3两颗卫星的卫星激光测距残差图
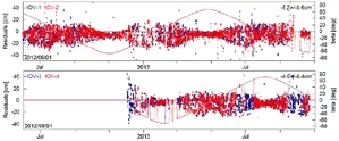
图17 四颗Galileo IOV卫星的卫星激光测距残差图
[1] 刘基余.国际导航卫星近况与中国发展设想.中国航天发展战略探讨.见:中国宇航学会编.应用卫星与卫星应用研讨会文集.北京:宇航出版社,1991年11月,P.294~321
[2] 刘基余.GPS卫星导航定位原理与方法(第二版).北京:科学出版社,2008年6月
[3] V. Burmistrov, et al, RUSSIAN LASER TRACKING NETWORK XV International Laser Ranging Workshop Canberra, 2006
[4] Yang Fumin, et al, SLR Observations of Compass-G2, Shanghai Astronomical Observatory, Chinese Academy of Sciences, 2009
[5] O. Montenbruck, P. Steigenberger, G. Kirchner, GNSS Satellite Orbit Validation Using Satellite Laser Ranging, http://www.iapg.bv.tun.de/mediadb, 2013.11.25
北斗全球系统全面推进,关键技术取得重要成果
由中国卫星应用产业协会主办的中国卫星应用产业论坛,11月27~28日在上海举行。来自政府有关部门、企事业单位和业界的专家齐聚一堂,共谋卫星应用发展蓝图。中国卫星导航系统管理办公室主任冉承其出席论坛并发表讲话,全面介绍我国北斗卫星导航全球系统的建设进展:北斗系统有关关键技术攻关已经取得重要突破,北斗核心芯片已实现自主可控,北斗地基增强系统将实现米级、厘米级乃至毫米级的高精度服务。北斗系统正式取得国际海事应用的合法地位,成为继美国GPS、俄罗斯GLONASS之后,第三个被国际海事组织认可的全球卫星导航系统。
冉承其表示,北斗地基增强系统既是北斗卫星导航系统的重要组成部分,也是国家卫星高精度导航的重要基础设施。在国家有关行业主管部门和地方的联合组织下,按照“统一规划、统一标准、共建共享”的原则,将对国内现有基准站进行升级改造,构建全国一张网。通过对北斗卫星导航信号传输误差进行差分修正,实现北斗米级、厘米级乃至毫米级的高精度定位服务。目前这一工程建设工作已全面启动,2015年底有望提供基本服务。此外,北斗星基的广域增强系统论证工作也在积极推进,将与地基增强系统相互补充,实现天地统筹,谐调共进。
The Current Status and Development on Refning GNSS Ephemeris by Means of Satellite Laser Ranging --Transmitting/receiving Issue(9) of GNSS Navigation Signals
Liu Jiyu
(School of Geodesy and Geomatics, Wuhan University, Wuhan, 430079)
Satellite laser ranging is the best external calibration for the microwave orbit determinations of the navigation satellites. Therefore it is used by the existing GLONASS, BeiDou, Galileo, QZSS and IRNSS satellites. This paper summarizes the current status and development on refning GNSS ephemeris by means of satellite Laser ranging, and discusses in detail the resolving method for Laser orbit determinations and it refnes GNSS ephemeris.
Satellite Laser ranging; Satellite-borne Laser retrorefector array; GNSS ephemeris
10.3969/j.issn.1672-7274.2014.12.001
TN96
A
1672-7274(2014)12-0001-11
刘基余,现任武汉大学测绘学院教授/博士生导师,兼任美国纽约科学院(New York Academy of Sciences)外籍院士、中国电子学会会士。主要研究方向是GNSS卫星导航定位/卫星激光测距技术,在国内外30余种中英文学术期刊上发表了280余篇相关研究论文,独著了(北京)科学出版社于2013年1月出版发行的《GPS卫星导航定位原理与方法》一书。他的主要业绩已分别载于美国于2001年出版发行的《世界名人录》(Who's Who in the World)、美国于2005年出版发行的《科技名人录》(Who's Who in Science and Engineering)和中国科学技术协会于2007年出版发行的《中国科学技术专家传略》工程技术编《电子信息科学技术卷2》等五十多种国内外辞书上。
猜你喜欢
舰船电子对抗(2022年6期)2022-12-25
新能源科技(2022年9期)2022-11-20
科学导报(2022年39期)2022-07-04
环境技术(2020年1期)2020-03-06
测控技术(2018年6期)2018-11-25
通信电源技术(2018年5期)2018-08-23
航空学报(2017年5期)2017-11-20
制导与引信(2017年3期)2017-11-02
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07
