
船用水泵综合测量装置设计
2014-02-27 02:11:52姜应战吴言凤
船电技术 2014年7期
王 超,姜应战,吴言凤
船用水泵综合测量装置设计
王 超,姜应战,吴言凤
(海军潜艇学院,山东青岛 266042)
为综合测量和集中显示修复后的船用水泵性能参数,研究应用传感器和微控制器设计船用水泵测量装置。在软件方面,基于RTX-51Tiny实时操作系统设计数据采集、数据计算、键盘扫描和命令处理等多任务。在硬件方面,采用多种传感器检测流量、压力、温度、电压和电流;设计模拟量、数字量和频率等不同形式信号与微控制器的对接转换电路;采用各种转换芯片设计键盘、液晶显示器和打印机与微控制器的通信接口电路。依据设计制成的船用水泵综合测量装置样机实时性好、精度高,集中显示测量结果。
水泵 测量 实时操作系统 多任务
0 引言
船用水泵修复后,通常采用分立的传感器或仪表分别检测水泵的进出口压力、出口流量及其拖动电动机的电压和电流等性能参数。为综合测量和集中显示小型船用水泵修复后的性能参数,提出应用传感器和微控制器,基于RTX51-Tiny实时多任务操作系统开发设计船用水泵综合测量装置(以下简称装置)。要求装置具有测量水泵出口压力、流量和温度,测量电动机电源电压和三相电流的功能,用液晶模块集中显示测量数据,并与水泵电气控制电路相结合设置电动机过载保护功能。
1 硬件设计
1.1 组成
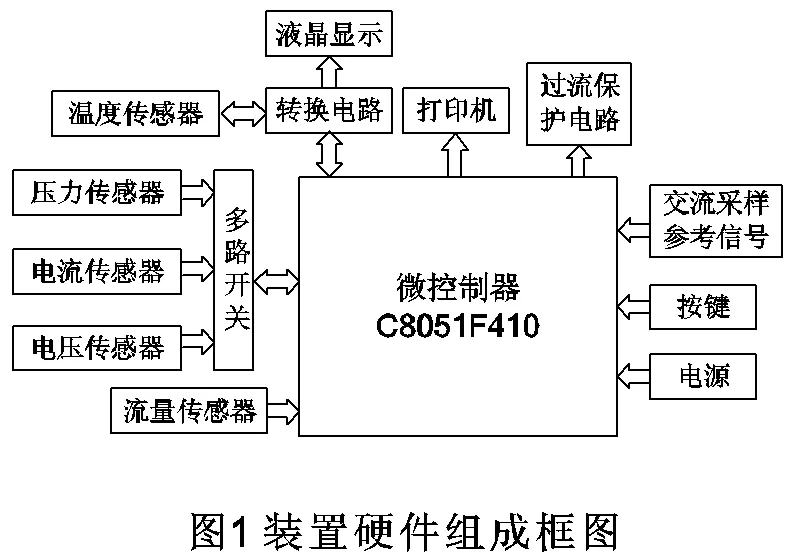
装置硬件以C8051F410微控制器为核心配合外围电路和传感器构成。设计中充分利用C8051F410微控制器的资源特点,降低硬件和软件的复杂程度。图1为装置硬件组成框图,包括电压传感器、电流传感器、压力传感器、流量传感器、温度传感器、微控制器、存储器电路、转换电路、交流采样参考信号电路、电源电路、液晶显示器及微型打印机等。
1.2 传感器
互感型电量传感器便于隔离强电和弱电。用互感型电压隔离传感器测量三相电源电压,输出信号为0~5 VDC;用互感型电流隔离传感器跟踪测量电动机三相电流,输出信号为0~5 VAC。
用扩散硅压力变送器测量压力,输出信号为0~5 VDC。
用电磁流量计测量流量,输出频率设定为0~5 kHz。
用非接触红外温度传感器测量温度,输出RS232方式的数字编码信号。
这些传感器输出信号型式不同,要求装置具有处理多种数据信号能力的特点。
1.3 C8051F410微控制器及端口分配
C8051F410微控制器(以下简称微控制器)是一种混合信号微控制器,具有以下特点[1]:高速8051微控制器内核,运算速度在时钟频率为50 MHz时最高可达50MIPS;24个IO端口可配置为上拉模式或开漏模式,耐压5 V;12位200 ksps的AD转换器,可配置为任意IO口输入,处理多种混合信号,还可配置为差动输入,以提高抗干扰能力和转换精度;两个12位电流输出DA转换器;16 kFlsah存储器、2304位RAM;内部振荡器精度为0.25%。
微控制器端口分配如下:P03输入电量、压力传感器的模拟信号;P20、P21及P22控制信号切换;P07输入流量传感器的频率信号;P06输入电流采样参考信号;P17输出过流保护信号;P04、P05输入温度传感器的数字通讯信号,同时控制LCD显示;P10控制CD4052与LCD切换;P14、P15、P16键盘接口;P11、P13、P23、P26打印机接口;P00作I2C总线SDA信号线;P01作I2C总线SCL信号线。
1.3 电量信号和压力信号调理电路
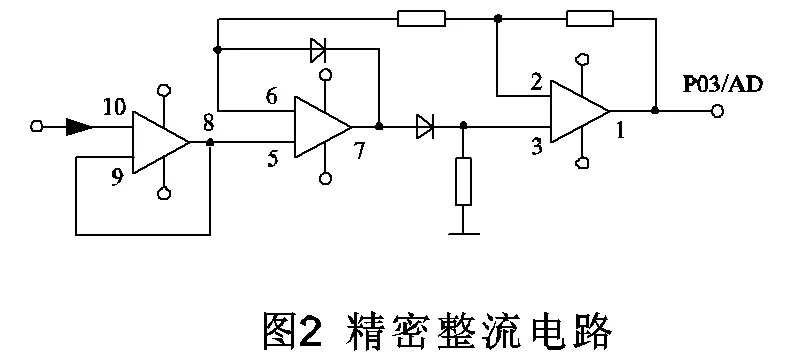
电量传感器和压力变送器输出的电压模拟信号经整定电位器、多路开关(CD4051)和精密整流电路调理,以与微控制器的AD输入信号标准相匹配。其中精密整流电路如图2所示,本电路理论上可实现对0~±VDD范围内信号整流,它对微弱信号的全波整流,避免二极管整流存在的700 mV电压损失,提高了测量精度。
1.4 流量信号输入电路
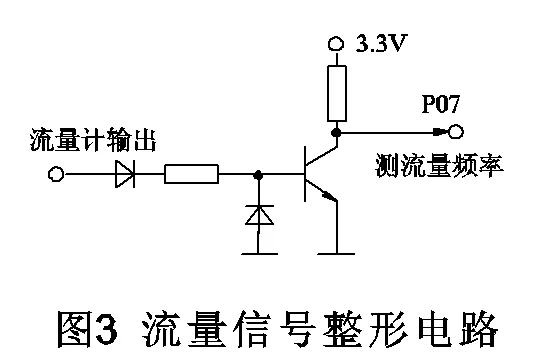
用三极管和二极管等构成如图3所示的信号整形电路,将流量计的频率信号整形成与微控制器输入端口相匹配的数字信号。
1.5 电流采样参考信号变换电路
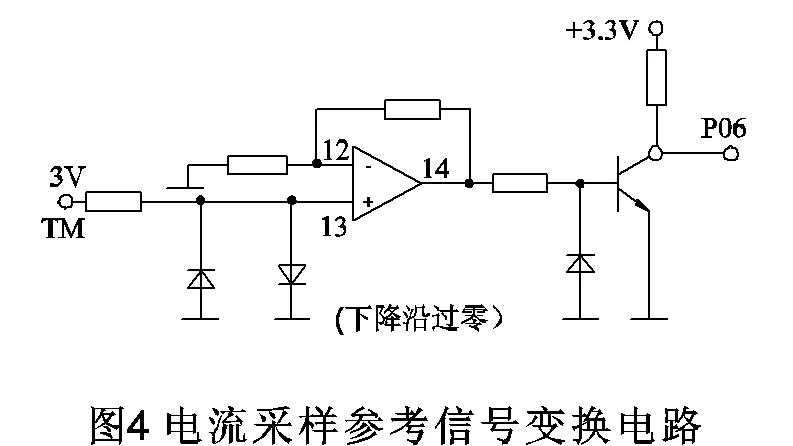
电流传感器的输出是瞬时值对应的标准信号。计算有效值时,在一周期内的采样点数必须固定,即当频率波动时,采样点数应保持不变。采用图4所示变换电路,将被测电源信号,整形成方波作采样周期参考信号。
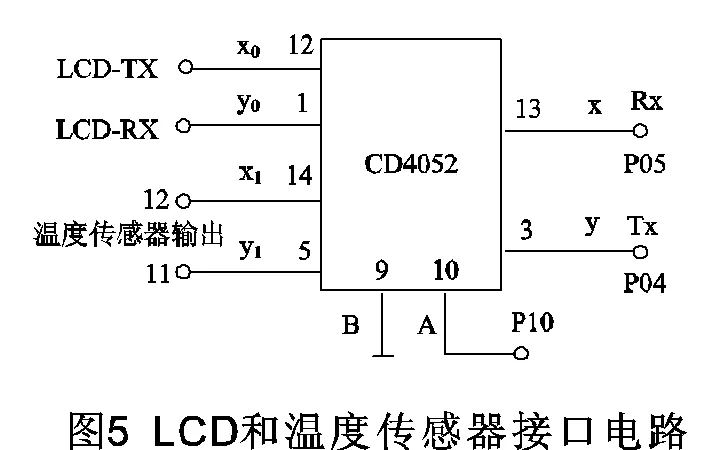
1.6 LCD控制与温度传感器接口电路
LCD的控制方式是TTL电平异步串行通信接口、温度传感器的输出是RS232异步串行通信接口,而微控制器仅有一对异步通信端口(P04、P05)。为同时控制LCD显示和采集温度信号,用多路开关(CD4052)构成共享异步串行通信端口。由微控制器端口P10控制多路开关。P10=0时,异步通信端口供LCD使用,P10=1时异步通信端口采集温度信号。电路如图5所示。
1.7 键盘电路
用并/串转换芯片(74165)构成六键按键电路。1键设置时钟及过流保护值;2键查看存储的测试结果;3键设置参数时为加1键,查看状态时为向前翻页键;4键设置参数时为减1键,查看状态时为向后翻页键;5键打印测量结果;6键保存设定参数及测量数据。
1.8 打印机接口电路
用串/并转换芯片(74164)构成打印机数据信号接口电路。将微控制器端口P11、P26的串行输出转换成并行输出,送给打印机的数据接口。用三极管构成电平转换电路,将打印机忙信号转换为3.3 V电平,与微控制器端口P13电平相匹配。
1.9 时钟及存储电路
时钟及存储电路均采用I2C总线控制方式。时钟电路由时钟芯片(PCF8563)构成,向整个装置提供时间基准和时钟信息。存储电路用基于I2C总线模式的非易失存储器构成。
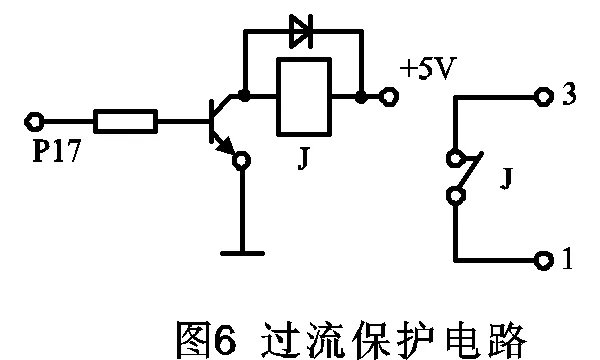
1.10 过流保护电路
用三极管和继电器构成过流保护电路,如图6所示。当测得电流超过设定限值时,微控制器端口P17输出高电平控制继电器J动作,触点J断开通过水泵电气控制电路实施停机保护。
2 软件设计
2.1 总体方案
因微控制器运算为浮点数运算,故选择C语言编程,避免汇编语言的复杂性。
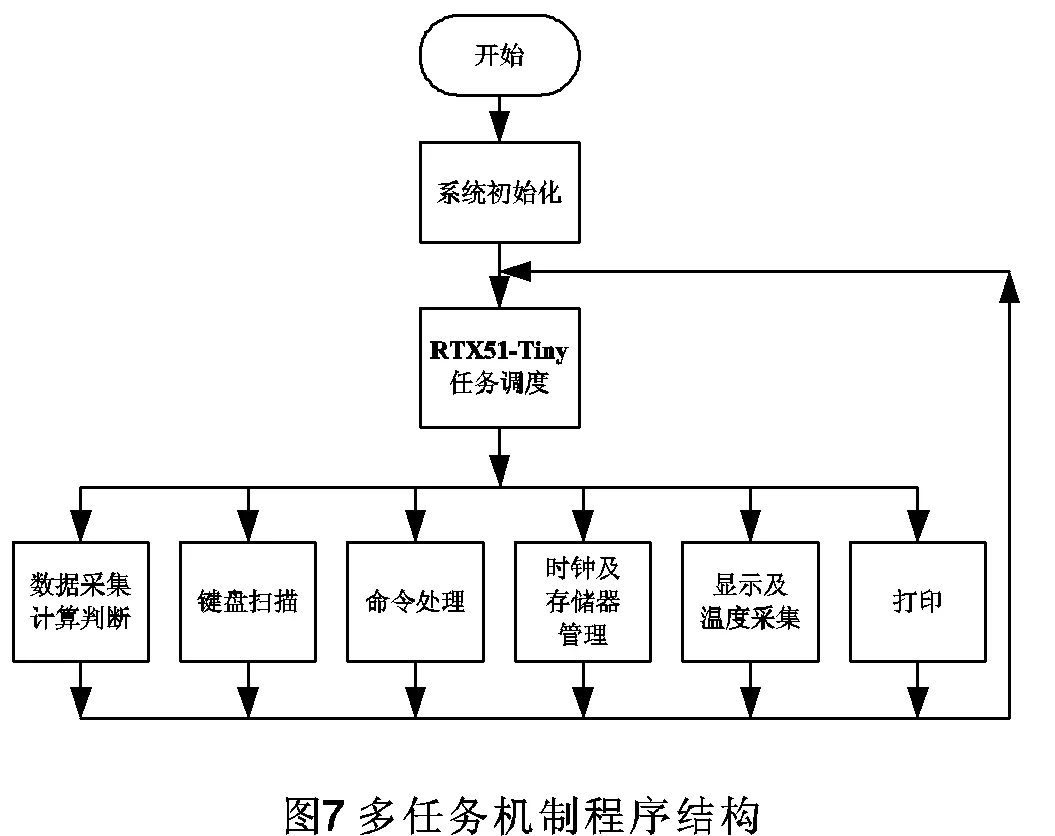
运用RTX-51Tiny实时操作系统[2],按多任务机制设计测量数据综合处理软件。多任务机制将软件系统功能分解为多个相对独立的任务,CPU运行时间被划分为许多小时间片,各任务分别在各自的时间片内访问CPU,从而产生了在微观上轮流运行,宏观上并行运行的实时效果[3]。如图7所示,软件分为6个任务,各任务之间以发送信号及全局变量的形式进行同步,并以协调方式切换。
2.2 数据采集及计算任务
2.2.1数据采集
定时器控制电量、压力模拟量采样,完成一路AD转换后,由软件控制将下一模拟量切换至微控制器内部AD采样,如此循环。
温度传感器输出数字编码,微控制器发送读命令,温度传感器收到读命令后发回当前温度值。
流量计频率信号整形成数字脉冲频率,微控制器将频率换算成流量。
2.2.2计算与判断
采集的电流、电压、压力、流量和温度信号换算成实际物理量(选定量纲)送入微控制器显示缓冲区,进行计算与判断。
1)相电流计算。电流传感器输出电流瞬时值,采用均方根计算相电流有效值:
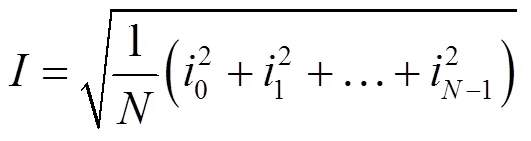
式中:为一个周期的采样点数,0∙∙∙i-1为每个采样点的电流值。0∙∙∙i-1的大小由电流传感器输出电压值、量程及AD位数决定。电流传感器输出5 VAC,对应测量电流上限max;微控制器的AD为12位,最高转换数值为4095,则采样点的电流计算公式为:
式中:AD为AD的电流采样值,K=0,1,∙∙∙,-1。将每周期(20 ms)采样点数定为32(或64),能满足测量精度要求[4]。
2)起动电流计算。完成相电流计算后,判断当前值是否大于原最大值,若是则替换原最大值。在起动阶段此电流即为起动电流。
3)电压计算。电压传感器输出5 VDC,对应电压测量上限max。其计算公式为:

式中:AD为AD的电压采样值。
4)压力计算。压力传感器输出5VDC,对应测量压力上限max,其计算公式为:

式中:AD为AD的压力采样值。
5)流量计算。设定电磁流量计输出频率5kHz,对应流量测量上限max,其计算公式为:
式中:in为电磁流量计脉冲频率测量值。
6)过载电流判断。完成相电流计算后,判断当前电流值是否大于过载电流设定值,若是并在延时时间后仍大于设定值,则通过微控制器发出停机信号。
2.3 键盘扫描任务
定时扫描键盘,将按键组合命令信号发送给命令处理任务。
2.4 命令处理任务
识别并执行按键组合命令。设置时钟日期、设定过载电流值、设定延时时间、保存测量数据、查看测量数据及打印。
2.5 时钟与存储器管理任务
时钟芯片与存储器芯片同为I2C总线接口方式。根据I2C接口规范,由软件控制时钟及非易失存储器读写。因RTX-51Tiny不支持信号量操作,所以将它们的操作放在同一任务。
2.6 LCD显示及温度采集任务
LCD显示及温度传感器接口均为异步通信接口。与本文2.5同理,归为同一任务。LCD中文显示模块通过UART发送指令控制显示内容。
2.7打印任务
微控制器发送指令控制打印机,送打印指令前,先检测打印机是否处于“空闲”状态,若是(P13=0)则打印命令通过P11和P26配合将并行数据转换成串行数据送至串/并转换器,由转换器并行输出端送至打印机,并加载锁存信号(P23输出一个脉冲)。
3 结束语
按本文设计方案制成船用水泵综合测量装置原理样机,实现了综合测量修复水泵出口压力和流量温度、电源电压及电动机工作电流等参数,并用液晶模块集中显示测量参数。装置运行稳定,实时性好,测量最大误差小于1%,各性能指标达到设计要求。
应用结果表明,运用传感器和混合信号微控制器,基于RTX-51Tiny实时多任务操作系统设计测量数据综合处理软件,构成水泵综合测量装置能保证测量数据综合处理的实时性和测量精度,技术思路和方法可行。本文提出的设计方法可用于设计其它泵类机械的综合测量装置。
[1] 潘琢金译. C8051F3410/1/2/3混合信号ISP FLASH微控制器数据手册. http://www.xhl.com.cn.
[2] Keil software Inc. RTX51 Tiny User’s Guide. http://www.keil.com.
[3] 欧伟明. 嵌入式应用软件任务划分的原则. 单片机与嵌入式系统应用,2007,(5):65-67.
[4] 徐世川. 正弦交流采样理论误差的估计. 电气传动自动化,2000,22(6):56-57.
Design of Integrated Measuring Device For Repaired shipboard Water Pump
Wang Chao,Jiang Yingzhan,Wu Yanfeng
(Naval Submarine Academy, Qingdao266042, Shangdong, China)
TP460.403
A
1003-4862(2014)07-0059-04
2014-03-31
王超(1960-),男,副教授。研究方向::船舶电气设备。
猜你喜欢
数学小灵通·3-4年级(2021年9期)2021-10-12 05:47:46
科学家(2021年24期)2021-04-25 13:25:34
小学生学习指导(低年级)(2020年10期)2020-11-09 09:21:58
电子制作(2017年14期)2017-12-18 07:07:58
网络安全和信息化(2017年6期)2017-11-23 08:36:18
数学大王·中高年级(2017年2期)2017-02-08 15:52:55
学苑创造·A版(2016年4期)2016-04-16 17:57:51
电脑迷(2015年6期)2015-05-30 08:52:42
职业·中旬(2015年4期)2015-05-30 05:54:49
单片机与嵌入式系统应用(2014年8期)2014-03-23 23:18:21
