高通滤波在损伤检测中的应用
2014-02-24 03:26:44张炜曾义权
噪声与振动控制 2014年2期
张炜,曾义权
(中国人民解放军91379部队,山东青岛 266002)
结构的健康监测(SHM)在维护结构的完整性和安全性,避免灾难性事故等方面具有重要意义。在众多的结构健康监测技术中,以振动响应为基础的损伤检测方法,由于其实现简单,受到了广泛的关注。损伤会造成结构物理特性的改变,如刚度的降低会造成结构固有频率的降低,因而利用结构固有频率的变化可以检测损伤的存在。但是由于固有频率属于结构的全局量,只能用于损伤的识别而不能用于损伤的定位[1]。
为了确定损伤的位置和大小,科研工作者进行了大量的研究[1]。大多数的算法需要提供结构完整状态下的数据,这往往难以做到。利用曲率模态的方法可以有效识结构的多处损伤[2],但是这种方法要求提供结构损伤前的曲率模态。为了解决这一问题,学者们进行了许多的研究和探索,其中空间小波变换进行梁结构的损伤识别方法已被广泛采用[3]。对位移模态进行小波变换,在损伤处会出现小波系数模的极大值,以此来实现对损伤的定位,而良好检测结果的获得,需要选择合适的母小波和变换尺度,而且研究结果表明,仅仅利用小波系数很难识别损伤程度[4]。为此,Douka[5]提出了可以反映损伤程度的强度因子,但强度因子的求得却带来了巨大的计算量。康兴无[6]等从结构刚度和柔度矩阵的正交性出发,结合有限元理论和矩阵摄动理论,提出基于柔度变化的结构损伤检测指标,并通过平面桁架结构的数值模拟证明了该方法的有效性。
提出了基于高通滤波的结构损伤检测方法,该方法具有不需要结构完整状态下模态信息的优点,而且计算快捷,损伤定位准确,同时可以为损伤程度的估计提供重要参考依据。文中先以双裂纹梁为例给出了含裂纹梁的模态分析,然后阐明了基于高通滤波的损伤检测的原理,并给出了数值算例,讨论了仿真处理的结果,最后分别以单裂纹梁和双裂纹梁为例,进行了实验验证。
1 含裂纹梁的模态分析
一悬臂梁长L,宽和高都为h,如图1,裂纹模拟为无质量扭转弹簧,裂纹位置为l1和l2,裂纹深度分别为a1和a2。
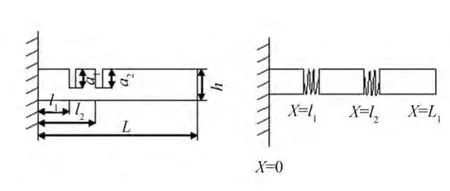
图1 双裂纹悬臂梁模型
由文献[7]可知,裂纹处的局部柔度可表示为

其中a为裂纹深度,E为悬臂梁的弹性模量,I为转动惯量,J(a h)为柔度函数,其表达式如下
每段梁的位移为

上式中K4=ω2ρAl4(EI),其中A为梁的横截面积,ω为梁的振动角频率,ρ为梁的密度,ti(i=1~12)为未知系数。悬臂梁边界条件如下

裂纹处的连续性条件为

由式(4)、(5)、(6)可得12个方程,写成矩阵形式

由(7)式有非零解可得特征方程

解特征方程可得到梁的任意阶固有频率K,再K代回(7)式,可得到系数ti(i=1~12),将K和ti(i=1~12)代回(3)式得到模态振型。
2 基于高通滤波的损伤检测
图2(a)表示实验测量所得的损伤梁的结构模态,可以把它看成由两部分组成:没有损伤和噪声的完整梁模态(图2(b))和由损伤和噪声组成的不规则成分(图2(c))。一般情况,在损伤很小的时候,模态变化不明显,无法从模态上区别出损伤点,为了克服这一情况,可以直接利用高通滤波的方法过滤掉模态中无损伤的模态,仅仅提取出损伤的成份来观察,这样就能把细小的损伤信号放大,使之一目了然。假设测量模态为M,完整模态为W,损伤和噪声为R,则有

滤波是有选择的提取或去除信号中某些频率信号,高通滤波就是衰减或滤除掉信号的中的低频率分量,保留信号中的高频分量,强化信号的锐变[8]。若M(x)为测量模态,H(x)为滤波函数,则有

输出R(x)为输入M(x)与滤波函数H(x)的卷积。
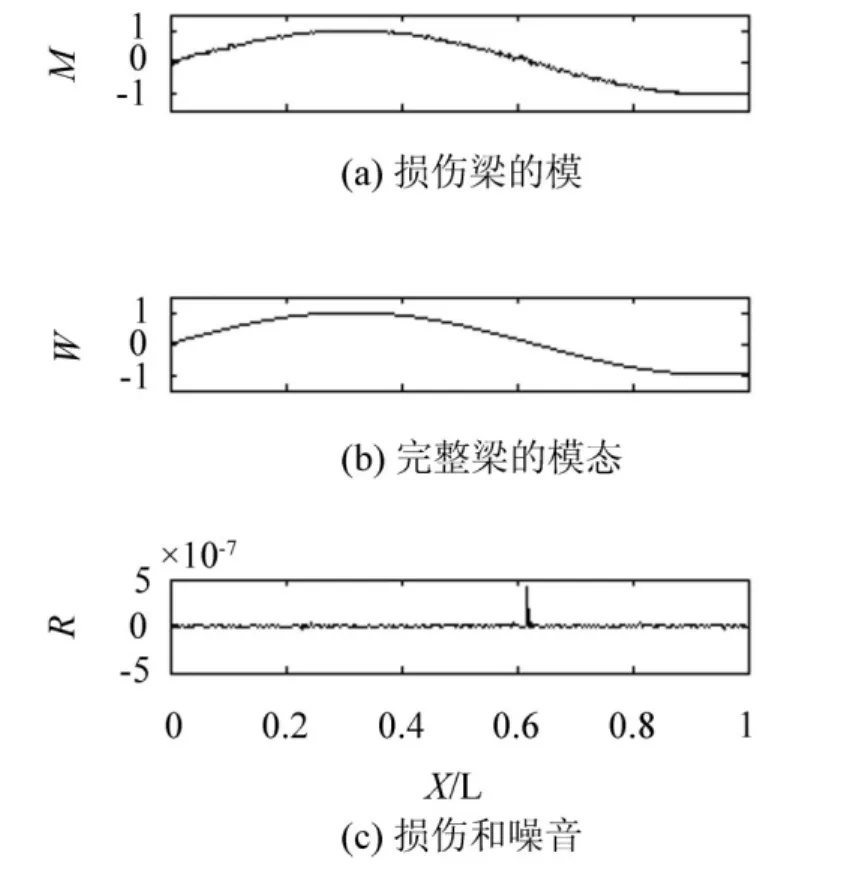
图2 测量模态的组成
3 数值算例
以双裂纹的悬臂梁为例,对所述的高通滤波方法进行数值模拟。一悬臂梁长300 mm,宽度b和高度h均为10 mm,假设梁的固定端在x=0处,第一条裂纹的位置为l1=30 mm处,相对深度为0.05,第二条裂纹的位置l2=150 mm,相对深度为0.05,计算模态时,悬臂梁每隔1 mm一个点共301个点,运用前文所述的模态分析方法可得前四阶模态振型如图3所示。

图3 悬臂梁前四阶模态振型
显然,从图3无法直接得到裂纹位置。
3.1 损伤的定位
运用巴特沃斯数字滤波器对前两阶模态进行高通滤波,巴特沃斯滤波器最早由英国工程师斯替芬•巴特沃斯提出,其特点是通频带内的频率响应曲线最大限度平坦,没有起伏,而在阻频带则逐渐下降为零。巴特特沃斯数字滤波器可以直接通过Matalb软件中的butter函数实现,其调用格式为[b,a]=butter(n,Wn,’high’),n表示滤波器阶数,Wn表示截止频率,为归一化频率,high表示高通滤波。利用巴特沃斯2阶和4阶高通滤波,截止频率为0.08,取滤波后值R的平方,分析结果图7。
从图4可以清晰的看到,前两阶模态中在损伤置会出现尖锐的突变,对损伤位置的识别效果非常好,同时可以看出,对于相同损伤程度的不同位置,在同阶模态中有不同的突变值,对于同一位置的相同损伤程度,在不同阶模态中也有不同的突变值。但在同阶模态中的相同位置,不同损伤大小呈现出有规律的突变,这点可以作为估计损伤程度的依据。同时,从图4可以看到,选择适合的滤波器参数,会得到更好的结果。

图4 模态振型的巴特沃斯高通滤波
3.2 损伤程度的估计
下面仍以上述规格悬臂梁为例,假设其只在150 mm处有一条裂纹,分别取0.10h,0.15h,0.20h三个不同的损伤深度,研究其对滤波后结果的影响。以1阶模态为例,图5表示损伤标准R2和随损伤深度之间的变化关系(为了看得更清楚,将损伤因子纵坐标取对数),可见,R2的值随损伤深度的增加而增大。因此,对于同一损伤位置,可以将突变值的大小作为评估损伤程度的依据。
4 实验分析
该实验用一铝质梁,长度L=510 mm,宽b=30 mm,高h=5 mm。实验一裂纹位于255 mm处,实验二中裂纹位于150 mm和300 mm处,裂纹深度均为2 mm。将梁平均分成17段,每段长度为30 mm。实验设备为江苏联能电子技术有限公司的振动力学综合实验系统,如图6所示。

图5 R2随损伤深度的变化

图6 振动力学综合实验系统
利用冲击激励法测量损伤梁的模态参数,采用逐点激励,单点响应的方式,响应测量点选在第五点,实验的采样频率为5 000 Hz,用力锤依次对17个点进行敲击,每个点敲击3次得到传递函数的平均值,最后由配套软件得到损伤梁的结构模态。观察实验结果发现该实验的2阶模态具有较小的阻尼比,实验测得2阶模态如图7所示。

图7 实验测量2阶模态
图8为实验测量2阶模态的高通滤波分析结果。
实验一的检测结果与实际损伤位置略有偏差,这是由于实验误差所造成的。实验二的高通滤波结果与裂纹位置完全一致。

图8 单双裂纹梁2阶模态高通滤波
5 结语
从理论和实验两方面验证应用高通滤波方法检测结构损伤的有效性,这种方法直接从实验测得的模态入手,不仅不需要结构健康状态下的模态信息,而且可以快速准确的识别结构的一处或者多处损伤,滤波后的损伤标准R2可以很好的反映出损伤的程度,依此可以对损伤程度进行定量分析,但对于损伤程度的精确计算,还需要进一步深入研究,同时需要提高测试设备的精度,以获取更精确的测量数据,使分析结果更接于实际损伤的情况。
[1]王术新,姜哲.基于结构振动损伤识别技术的研究现状及进展[J].振动与冲击,2004,23(4):99-102.
[2]刘义伦,时圣鹏,廖伟.利用曲率模态识别桥梁损伤的研究[J].振动与冲击,2011,30(8):77-81.
[3]Wang Q and Deng X.Damage detection with spatial wavelets[J].International Journal of Solids and Structures,1999,36,927-939.
[4]Quek S,Wang Q,Zhang L and Ang K.Sensitivity analysis of crack detection in beams by wavelet technique[J].International Journal of Mechanical Science,2001,Vol.43,2899-2910.
[5]Douka E,Loutridis S and Trochidis A.Crack identification in beams using wavelet analysis[J].International Journal of Solids and Structures,2003,Vol.40,3557-3569.
[6]康兴无,陈世健,刘勇,马慧娟.一种基于柔度的结构损伤定位新方法[J].噪声与振动控制,2009,6:40-43.
[7]Shifrin EI.Ruotolo R.Naturalfrequenciesofa beam with an arbitrary numberofcracks[J].Journal of Sound and Vibration,1999(03):409-423.
[8]雷学堂,徐火希.FIR数字高通滤波的时域和频域物理分析[J].吉首大学学报(自然科学版),2006,27(5):66-71.
猜你喜欢
声学与电子工程(2021年2期)2021-07-26 05:54:04
电子制作(2017年1期)2017-05-17 03:54:07
小猕猴智力画刊(2017年4期)2017-05-04 04:12:37
电测与仪表(2016年15期)2016-04-12 00:30:54
燕山大学学报(2015年4期)2015-12-25 02:19:55
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
民族古籍研究(2014年0期)2014-10-27 08:24:42
故事会(2014年5期)2014-05-14 15:24:16
电子设计工程(2014年20期)2014-02-27 12:01:00