
变速恒频双馈风力发电系统并网控制仿真
2014-02-18 01:56于会群彭道刚
电力科学与工程 2014年2期
高 扬,于会群,张 浩,彭道刚
0 引言
风能作为一种可再生的清洁能源,近年来越来越受到各国的重视。风力发电由于具有零污染、投资周期短、占地少等优点,故装机速度近年来迅速提升。风力发电机组的控制技术,目前有变桨距调节技术、定桨距失速调节技术、主动失速调节技术、变速恒频技术4 种[1~13]。变速恒频风力发电系统,因其具有风能转换效率较高、可灵活调节有功和无功等特点,近年来得到了广泛应用。本文就其控制策略建立模型并仿真,力求得出具有指导意义的理论结果。
1 变速恒频风力发电系统基本原理
目前,国内外已建或新建的大型风电场中的风电机组多采用变速恒频(Variable Speed Constant Frequency,VSCF)风电系统运行方式。当风速改变时,VSCF 风电系统可适时地调节风力机转速,使之保持最佳状态,使风能利用系数Cp接近或达到最佳,可实现对风能最大限度地捕获。与恒速恒频(Constant Speed Constant Frequency,CSCF)风电系统相比,系统的发电效率大为提高,转速运行范围也较宽,而且可灵活地调节系统的有功和无功。
交流励磁变速恒频风力发电系统的结构框图如图1 所示,系统主要由风力机、增速箱、双馈异步发电机、变压器、双PWM 变频器、滤波器、控制系统、桨距角控制等几部分构成。由交流异步发电机的基本原理可得下列关系:

式中:fs为定子电流频率,Hz;n 为转子转速,r/min;p 为电机极对数;fr为转子电流频率,Hz。

图1 双馈异步发电机系统
双馈发电机的结构与绕线式异步电机结构相类似,运行时定子绕组通过变压器与电网相连,转子则通过双PWM 变频器和变压器与电网相连接。设定子电流产生的旋转磁场的同步速为ns,根据双馈电机转子转速的变化,双馈发电机可有以下3 种运行状态:当转子转速n <ns时,转子绕组相序和定子绕组的相序相同,双PWM 变频器向转子提供交流励磁电流,产生的旋转磁场的旋转方向与转子的旋转方向也相同,fr前取正号,定子向电网发出电能;当n >ns时,转子绕组相序和定子绕组的相序相反,产生的旋转磁场的旋转方向与转子的旋转方向也相反,fr前取负号,同时由定子和转子向电网发出电能,能量在双PWM 变频器中逆向流动;当n =ns时,fr=0,变频器向转子提供直流励磁,发电机作同步发电机运行,定子向电网发出电能。由以上分析可知,当发电机转速n 伴随着风速的改变而变化时,若通过变频器随时调节转子励磁电流的幅值、频率、相位,使发电机能在亚同步速、同步速、超同步速作变速恒频运行,这就是发电机变速恒频运行的基本原理[1,14~15]。
2 交流励磁风力发电机功率特性及其风能捕获策略
2.1 功率特性
交流励磁风力发电机的机械功率为[2]:
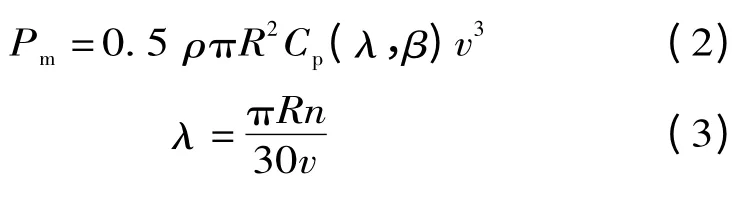
式中:ρ 为风力机所在处的空气密度;R 为风力机的风轮半径;Cp为风力发电机将风能转化成电能的转换效率,即风能转换系数;λ 为叶片顶端的速度(圆周速度)除以风接触叶片之前很远距离上的速度,即叶尖速比;β 为风机叶片与风轮平面的夹角,即桨距角;v 为即时风速;n 为风力机叶片的转速。当桨距角固定时,风能转换效率Cp与叶尖速比λ 的关系曲线如图2 所示。

图2 叶尖速比λ与风能转换效率Cp 关系曲线
设定一种风速,然后取不同的转速n,根据式(3)计算出相应的叶尖速比λ,由图2 找到对应的风能转换效率Cp值,根据公式(2),就可得到这种风速下风力机的输出机械功率。以风力机的机械角速度ωm为横轴,输出的机械功率Pm为纵轴,得到如图3 所示的关系曲线。改变风速,得到的风力机在不同风速v 时输出的机械功率Pm和风力机机械角速度ωm的关系如图3 所示[2~3]。

图3 风力机输出的机械功率和机械角速度关系曲线
图3 中A,B,C 3 点分别为风速v1,v2,v3时风力机输出的机械功率Pm的最大点,其中v1<v2<v3。由图3 可以看出: (1)在相同的机械角速度ωm下,瞬时风速v 越大,风力机输出的机械功率Pm也就越大;(2)在相同的瞬时风速v 下,风力机输出的机械功率Pm在某一特定的机械角速度ωm下存在着极大值;(3)增大瞬时风速v,风力机的机械功率Pm的最大值所对应的机械角速度ωm也随之增大[4]。
2.2 最优风能捕获策略
风速v 为定值时,由图3 可以看出,此时存在着唯一的最大机械功率输出点,相应的风能转换效率Cp也最大。但实际风速是经常变化的、随机的,且规律性很差。当实际风速小于额定风速时,风力机按照图2 所示的某一固定的桨距角β运行,调节发电机反转矩使其机械角速度ωm跟随风速v 的变化而变化,保持发电机在最佳的叶尖速比λ 下运行,输出机械功率最大,从而追踪最优的功率曲线,实现最大风能的捕获。当实际风速大于额定风速时,采取改变风力机机械角速度ωm与改变桨距角β 的双重调节,依靠机械调节桨距角β,改变风能转换效率Cp,限制风力机获得的能量,使风电机组的转速和功率得到控制,从而保证发电机功率输出的稳定性,风电机组就不会超出转速极限和功率极限运行,从而保护风机和发电机不受损坏[5~6,14]。
2.3 变桨控制
在风速低于额定风速情况下,桨距角设定为0°,保持恒定的最佳叶尖速比,从而实时追踪最佳功率曲线;当风速超过额定风速时,增大桨距角,失速调节,发电机保持额定功率输出。
3 双馈电机变换器的控制系统
3.1 网侧PWM 变换器控制策略
网侧PWM 变换器控制策略如图4 所示[9~12]。
本系统采用双环控制,外环为电压环,内环为电流环,并在定子绕组上建立静止坐标系a1-b1,同步旋转坐标系d -q;同时设q 为定子绕组上静止坐标系α1轴与d 轴的夹角;ea,eb,ec为网侧PWM 变换器交流侧的三相电压;id,iq是网侧三相电流ia,ib,ic经派克变换得到的两个分量;L,R 分别为交流侧进线的电感和电阻。
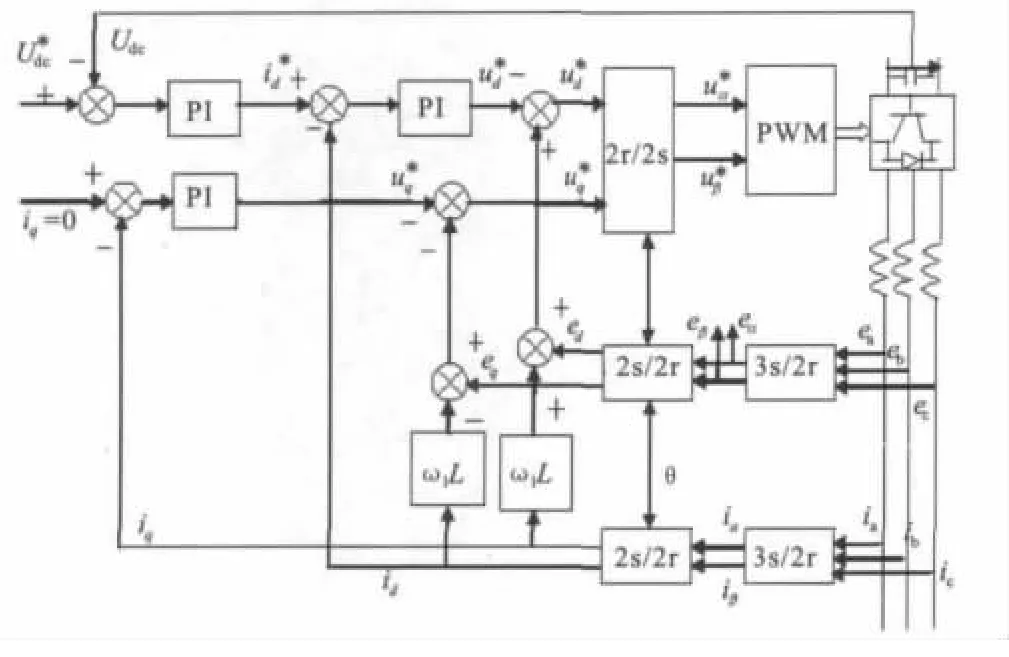
图4 网侧变换器控制策略图
在进行单位功率因数调节时,设iq=0,由功率因数所决定;和分别为电压分量,为解耦项;Δud和Δuq分别为d,q 轴电压耦合补偿项;电流反馈值id,iq分别与,相比较,经PI 调节,输出电压,,再与电压的解耦补偿项Δud,Δuq,及前馈补偿项ed,eq进行运算,得到的,作为指令电压;指令电压,再经坐标变换,得到a-b 坐标系中的电压分量,,然后输入到网侧变流器,进行PWM 调制,从而产生的驱动信号,对网侧变流器进行控制[7~8]。
在这里引入电网电压ed和eq进行前馈补偿的目的,是为了实现d 轴和q 轴电流的解耦控制,从而可以对无功功率和有功功率进行有效的独立控制。原理式如下:

3.2 转子侧PWM 变换器控制策略
双馈风力发电系统在变速恒频方式下运行时,矢量控制需要选取的定向参考矢量较多,最常见的是定子磁链定向与定子电压定向[13~15]。本文采取定子磁链定向矢量控制。控制策略如图5 所示。
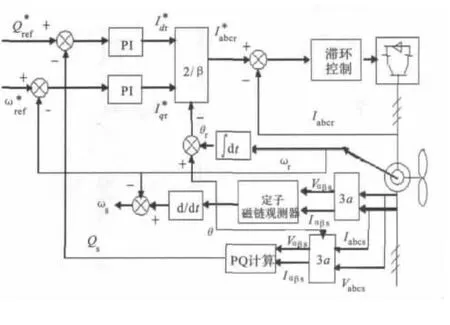
图5 转子侧变换器的控制图
在转子上建立两相静止坐标系α2-β2,设α2轴和α1轴的夹角为θr。θ 与θr相减得到α2轴与α轴的夹角。根据当前的风速v 计算出相应的风力机最佳叶尖速比λ 的机械角速度ω 值,作为转速参考值,再与转速反馈值ωref相比较,将比较后所得到的值送入PI 控制器,从而得到转子电流给定值。根据风电系统对无功的要求计算出无功电流的给定值。系统整体无功功率由网侧变换器来调节[13]。
以上控制策略是基于以下原理制定的。
假设将ω1定向在同步坐标系d-q 的d 轴上,ω1为定子磁链ωs的幅值。ωds=ω1为d 轴上的磁链分量,ωqs=0 为q 轴上的磁链分量,u 为定子电压矢量的幅值,根据电动机惯例,则有uds=0 和uqs=u。按照瞬时功率理论,交流励磁双馈风力发电机定子侧发出的有功、无功功率可写为:

由上式可以看出,定子侧输出的有功功率和无功功率分别与转子电流分量iqr和idr成线性关系,分别调节iqr和idr就可以调节有功功率和无功功率。
4 变速恒频风力发电系统并网控制运行仿真
4.1 仿真参数设置
双馈风力发电系统的仿真模型如图6 所示,参数如下:发电机的额定功率是1 500 kW,额定电压是0.575 kV,额定频率f =50 Hz,定子电阻Rs和定子漏感Lls分别为0.023 p.u.,0.18 p.u.;转子电阻Rt和转子漏感Llr分别为0.016 p.u.,0.16 p.u.;激磁电感LM为2.9 p.u.,转子的极对数为3。风机输入平均风速为9.8 m/s 时的最佳叶尖速比为λopt=6.5。
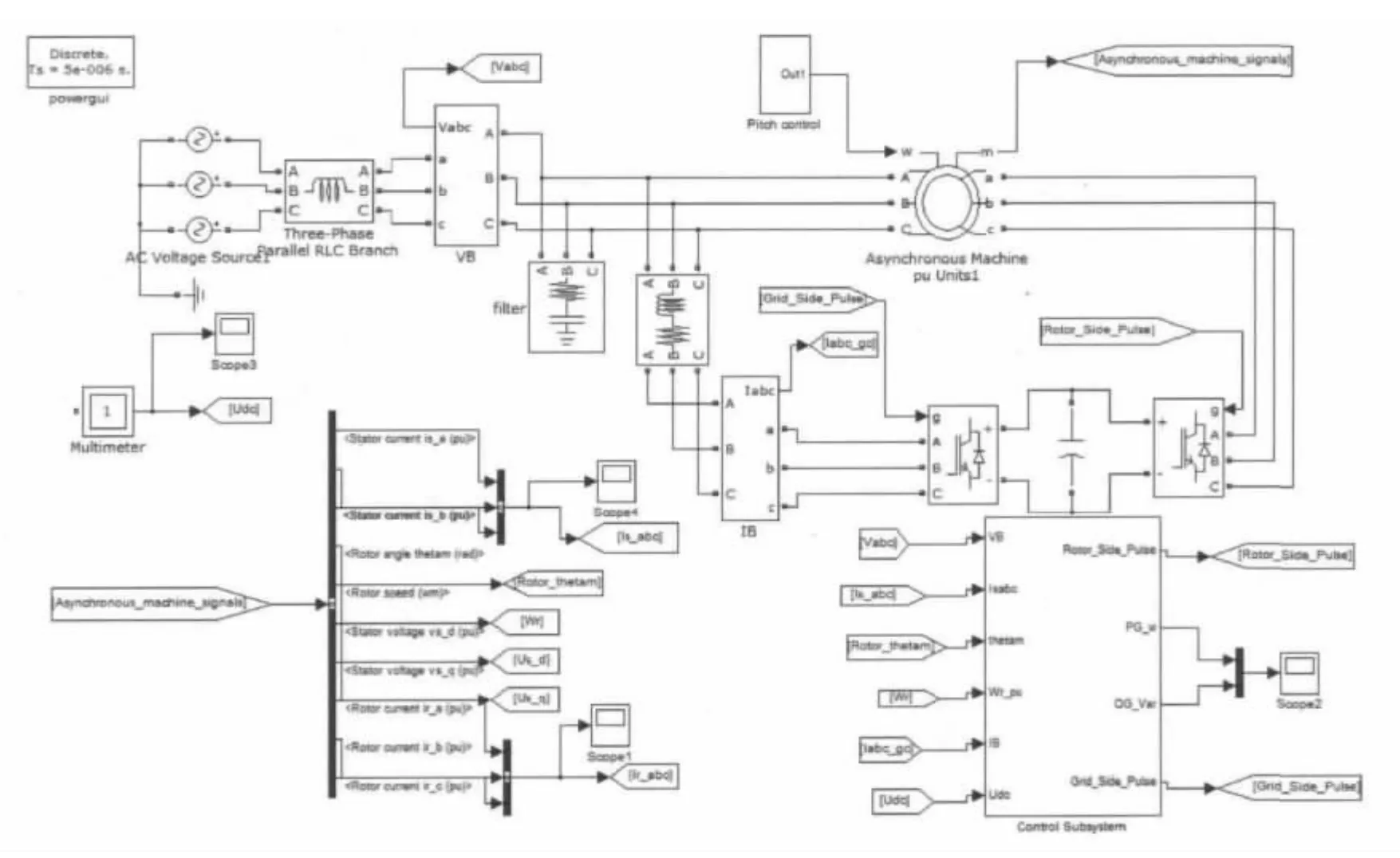
图6 双馈风力发电系统的仿真模型
4.2 仿真结果及分析
图7 为风速的仿真模型,图8 和图9 分别为定、转子三相电流仿真结果,图10 为定子侧有功功率和无功功率仿真结果,图11 为直流母线电压的调节控制结果。从图10 可以看出,经过短暂的调节过程之后,定子侧有功功率和无功功率实现了解耦控制。随着发电机转速的变化,定子侧有功功率虽然发生了改变,但能快速跟踪转速的变化,动态响应很快,而无功功率却不受影响,基本维持在0 附近,说明定子侧有功功率和无功功率实现了解耦控制。从图11 看出,直流母线电压随着风速的波动,很快达到了平衡,说明了定子侧对其进行了很好的控制。
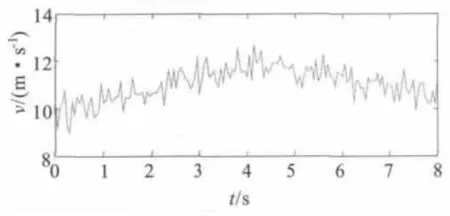
图7 风速模型

图8 定子三相电流

图9 转子三相电流

图10 定子侧有功功率、无功功率
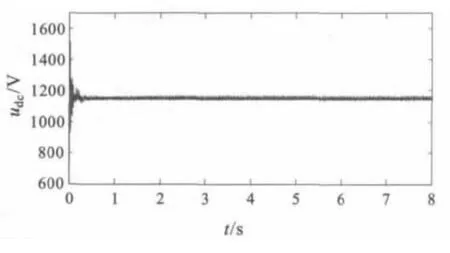
图11 直流母线电压
5 结论
本文首先介绍了交流励磁变速恒频风力发电机的基本运行原理;然后对风力机的功率特性和风能捕获策略进行了分析;其次,在建立数学模型的基础上,对追踪最大风能的控制策略进行了研究;再次,在双馈电机变换器的控制系统中,采用定子磁场定向的矢量变换控制技术,控制发电机输出有功功率,来调节电磁转矩和转速,从而获得了发电机有功功率和无功功率的解耦控制,为追踪与捕获最大风能创造了条件,并且对直流母线电压进行了很好的调节;最后,设置了系统仿真参数,对所建立的模型进行了计算机仿真,并对仿真结果进行了分析。仿真结果证明,所建模型正确,所提出的控制策略恰当。
目前该项控制研究中只应用了简单的PID 控制,其对于线性系统控制性能较为良好,但是对于参数经常变化系统、非线性系统的控制仍有不足,下一步将要对于桨距控制引入智能控制、并网控制进行调节。
[1]卞松江,吕晓美,相会杰,等.交流励磁变速恒频风力发电系统控制策略的仿真研究[J].中国电机工程学报,2005,25 (16):57-62.
[2]孙国伟,程小华.变速恒频双馈风力发电系统及其发展趋势[J].电机与控制应用,2007,34 (1):58-61,64.
[3]刘其辉,贺益康,张建华.并网型交流励磁变速恒频风力发电系统控制研究[J].中国电机工程学报,2006,26 (23):109-114.
[4]吴聂根,程小华.变速恒频风力发电技术综述[J].微电机,2009,42 (8):69-72.
[5]Qiao W,HaHey R G.Grid connection requirements and solutions for DFIG wind[C].Energy 2030 Conference,ENERGY 2008,IEEE,2008.17-18.
[6]刘其辉,贺益康,赵仁德.变速恒频风力发电系统最大风能追踪控制[J].电力系统自动化,2003,27 (20):62-67.
[7]韩照亚,赵兴勇,韩照晶,等.双馈风力发电机变换器的控制方法研究[J].电力学报,2013,28 (1):54-57.
[8]王志新,张华强.风力发电技术与功率控制策略研究[J].自动化仪表,2008,29 (11):1-6.
[9]李军军,吴政球,谭勋琼,等.风力发电及其技术发展综述[J].电力建设,2011,32 (8):64-72.
[10]徐希望,李庚银.基于Matlab/Simulink 的双馈感应风力发电机组建模和仿真研究[J].电网与清洁能源,2010,26 (11):95-101.
[11]王荣熙,林飞,郝瑞祥,等.变速恒频双馈异步发电机的控制策略及仿真[J].电机与控制应用,2009,36 (4):26-30.
[12]倪昊.变速变桨风力发电系统的控制[D].兰州:兰州理工大学,2012.
[13]陈思卓,郭鹏,范晓旭.双馈式风力发电系统最大风能跟踪控制的研究[J].电力科学与工程,2010,26(1):1-4.
[14]李亚林,李含善,任永峰,等.变速恒频风力发电系统的仿真研究[J].电力科学与工程,2007,23(3):1-5.
[15]王立果,裴庆磊,刘丽莉,等.基于PSCAD/EMTDC的双馈式风力发电机建模与仿真分析[J].电力科学与工程,2012,28 (8):24-29.
猜你喜欢
大电机技术(2022年3期)2022-08-06
湖南电力(2022年3期)2022-07-07
大电机技术(2022年1期)2022-03-16
防爆电机(2021年6期)2022-01-17
小天使·五年级语数英综合(2021年9期)2021-09-18
测控技术(2018年5期)2018-12-09
军事文摘·科学少年(2017年2期)2017-04-26
家教世界·创新阅读(2017年1期)2017-02-07
文理导航·科普童话(2016年3期)2016-04-26
振动工程学报(2015年1期)2015-03-01
