基于工业化物料传输流程的教学实验平台设计
2014-02-09 03:00闫保芳刘桐辛杨宗业
实验室研究与探索 2014年11期
张 铮, 颜 轩, 闫保芳, 刘桐辛, 杨宗业
(武汉大学 电子信息学院,湖北 武汉 430072)
0 引 言
检测控制类课程是基于精密机械设计、机电控制、传感器技术和嵌入式系统原理的综合实验课程,通过该课程能培养学生进行机械设计、数据分析、嵌入式编程等方面动手能力。以往的此类理论课,由于与实际脱钩、过于枯燥等原因,使学生们对于课程核心的理解比较困难。实验的作用是配合讲课内容,有针对性地给学生提供一个实际操作平台,使之加深对知识的理解,获得直接感性的认识,培养和锻炼动手能力[1]。但因为现有教学仪器老旧,设备单一,造成学生实际动手实践的时间偏少,学习兴趣降低,不利于学生深入理解理论课程知识。为了改善此类课程的教学,我们以工业化过程中常见的物料传输为例设计了一种检测控制实验教学平台。
本实验平台设计主要基于工业化流程中的物料采集、传递以及合格性测试方式,整体完成对采集到的物料进行传递、检测与剔除的任务。其采用了基于uC/OS-III操作系统、STM32应用平台的控制架构,实现了模块化编程,可移植性高,满足了基于平台的各类实验的流畅运行。平台使用了4种常用电机;5种常用机械传动机构;8种常用传感器模块。这使得本试验平台所包含的教学内容十分丰富,对于学生综合运用所学知识进行训练能起到十分积极的作用。
1 教学实验平台简介
本实验装置主要由STM32作为控制平台,由uC/OS-III操作系统作为调度管理,完成对各类常用电机进行精确控制,配合各种常用于工业流程中的传感器模块和多种常用机械结构,完成对物料进行不同形式的传递与检测工作,同时,针对不合格的产品进行剔除,合格产品进行收集。模型的三维图见图1。为了提高平台的可扩展性,本实验平台采用了模块化设计,即将其中每一单独的机械结构作为子模块,再将他们串联起来完成整个流程。这样做是因为模块化设计有利于整体装置的维护并扩展新的实验项目。
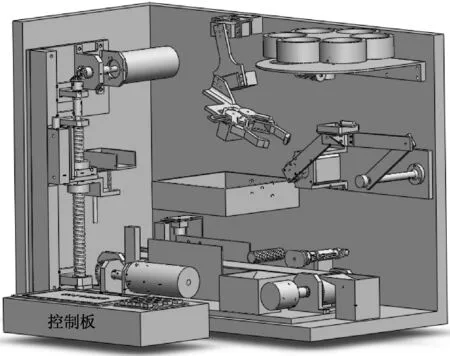
图1 实验教学平台模型
1.1 平台设计方案
平台的基本结构如图2所示,选取了精密机械设计课程中5种常用机械结构作为主体,辅以3类电机进行运动控制,根据传感器的各种反馈值,判断电机位置、物料的材料、颜色等值,以进行传递和筛选。
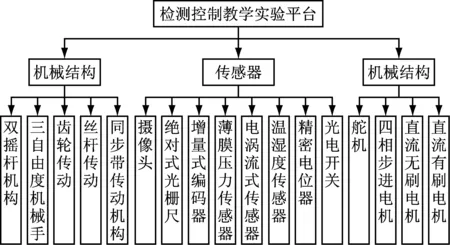
图2 教学实验平台框架图
1.2 STM32控制平台
STM32系列产品是由意法半导体集团研制的32位ARM Cortex-M3内核。它是为高性能、低成本、低功耗的嵌入式应用专门设计的系列内核,且类型多样,使用灵活[2],可以嵌入嵌入式操作系统,在此系统上完成复杂的算法,代替PC机完成各种任务[3]。ARM是嵌入式系统较为常见的架构[4]。为了能让学生接触更多的嵌入式应用场合,所选择的实验平台要能够提供尽可能多的硬件资源[5]。其中,STM32F103属于增强型系列,工作频率达到72 MHz[6],是同类产品中性能最高的产品。本平台选用STM32F103ZET6芯片作为主控芯片。它含有112个独立IO口,512 KB Flash,64 KB RAM,5个USART串口,3个12位A/D转换器,完全可以满足对各种不同实验功能的实现,同时也能够留有足够的资源以备实验装置的扩展。采用这个平台不仅利于平台性能的提高,而且可以让学生提前接触到除了传统51、MSP430之外的更高性能单片机。
1.3 uC/OS-III操作系统
uC/OS-III(Micro C OS-III)是一个可扩展的,可固化的,基于优先级的多任务实时性操作系统内核[7]。它被设计用于32位处理器,并且是完全根据ANSI-C标准进行编写的、可以实现时间片轮法调度方式的操作系统。它的实时性是实验建立的基础,如果不能很好地满足系统所需的实时性要求,就失去了研究的意义[8]。uC/OS-III已经是该系列的第三代内核[9],提供了现代实时内核所期望的大部分功能,包括资源管理、同步、内部任务交流等。采用最新一代的经典uC/OS系统,不仅对平台的可移植性、可扩展性有了更大提高,而且可以让学生提前接触到相比以前更好的操作系统和编程思想。
2 程序流程
运用C语言编程,向STM32平台中嵌入uC/OS-III操作系统,完成对检测控制实验平台的机电控制和触摸显示。控制程序流程简图如图3所示。除了控制系统以外,平台中还有一套触摸显示程序,运用屏幕既可以罗列各实验项目以供学生选择,也可以显示实验平台各部分电机、传感器的实时状态,以供维护。在供学生实验时,平台中有一段后台程序可以实时监控各传感器数值,当发现异常时,会及时控制各电机复位,防止发生意外和损坏。可见,构建一个快速、安全、可靠地实时嵌入式系统是整个系统的关键[10]。
3 平台单元实验的设计
(1) 步进电机实验。旋转取料台与双摇杆机构分别使用了四相步进电机和两相步进电机。学生需要运用单片机,实现与之对应的四相八拍和运用集成驱动芯片的控制方式,控制电机的转动方向和到达位置,最终使待测物料掉落进托盘中。再根据光电开关、电位器、电涡流式传感器和薄膜压力传感器的反馈量,对物料和电机状态进行检测与处理。本实验主要考察学生对步进电机控制方式的理解和应用,同时使学生加深对电位器、电涡流式传感器和薄膜压力传感器的了解。
(2) 舵机实验。机械手部分在3个关节上使用了3个舵机进行控制。舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统[11]。学生需要运用单片机,实现发送一定频率、一定宽度、一定变化速度的PWM脉宽信号,对舵机进行精确控制,使机械手能够完成抓取与传递的任务。再根据上一实验中,电涡流式传感器和薄膜压力传感器的检测结果,判断应该将取的物料放入废料区还是下一环节。本实验主要考察学生对舵机控制方式、脉宽调制方式的应用。
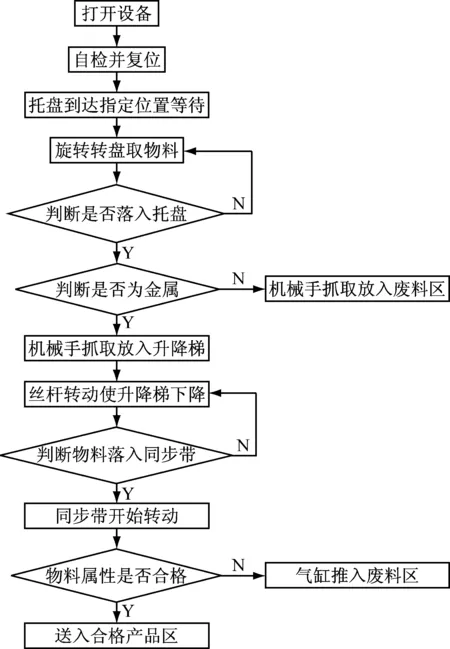
图3 控制程序流程简图
(3) 丝杆直流无刷电机实验。丝杆传送机构使用了1个直流无刷电机进行控制。学生需要运用单片机,实现对直流无刷电机驱动器3个控制端口的合理控制;运用电路、DA转换器或脉宽调制对电机进行合理的速度调节,实现速度控制。结合一侧的绝对式光栅尺,对电机速度和位置进行检测和处理。再根据升降梯上的薄膜压力传感器的反馈值,判断是否有物料被传递过来,以决定是否降下升降梯。本实验主要使学生了解直流无刷电机的工作方式、绝对式光栅尺的原理和应用。
(4) 同步带直流有刷电机实验。同步带传送机构使用了1个直流有刷电机进行控制。电机速度依靠脉宽调制的方式进行调节。再运用旋转增量式编码器,对电机速度和位置进行检测和处理。结合传送带上方的光电门、摄像头,检测物料颜色、大小等属性是否符合要求,如果不符合,使用笔型气缸将物料从传送带推入废料区;如符合,则直接进入合格产品区。本实验主要考察学生对摄像头处理图像算法的应用,使学生了解直流有刷电机的工作方式和气缸的使用。
4 平台控制功能的实现
(1) 步进电机闭环控制。步进电机的旋转需要依靠单片机和步进电机驱动器,以发送四相八拍或运用集成驱动芯片的方式,控制电机轴旋转一定的步进角。步进电机本身属于开环控制。为了防止长时间运行所产生的丢步现象,致使步进电机无法复位的情况,运用电位器对步进电机实行闭环控制。依靠电位器实时的电阻变化,以及平台上双摇杆机构两轴旋转角度相同的特点[12],便可以根据电位器的电压变化,使用AD转换器读取电压值,解算出步进电机实时角度,做到闭环控制。
(2) 丝杆传动闭环控制。直流无刷电机如果不进行速度控制,在使能后会以固定的速度持续转动。当将它应用到丝杆传动上时,就导致无法判断电机转动圈数和丝杆螺母到达的位置。利用绝对式光栅尺,将它与丝杆螺母连接在一起,利用光栅尺反馈的位置量和位移变化量[13],可以准确地知道电机转动所导致的升降梯位移变化,并可以依此对直流无刷电机进行方向和速度进行控制。
(3) 直流电机速度控制。直流电机因为其特性,不像步进电机一样可以精确控制其旋转角度和速度。所以可以采用调节供电电压实现加减速和对控制端口电平进行脉宽调制这两种方法,对直流电机的速度进行调控。其中,当采用脉宽调制的方式时,可以使用PID算法调整脉宽宽度[14],使直流电机的速度趋于稳定。再配合编码器和光栅尺进行反馈调节,可以达到精确控制的目的。
5 结 语
实验教学是培养学生实践创新能力的重要途径[15]。通过建立检测控制教学实验平台,让学生接触到一个融合了几门专业课程核心的、区别于以前单一制式的综合实验仪器,改善实际教学效果。通过实验平台的使用,学生一方面可以直观地了解机械传动机构实际运行方式,掌握传感器的工作原理以及嵌入式系统和编程。另一方面,通过实验平台的应用训练,学生可以更好地巩固课堂上学过的知识,激发他们对于所学专业的兴趣,还可以让他们更早地熟悉STM32和uC/OS-III的编程方式,有利于他们更好地适应以后的工作需要。本实验装置已应用在本科生测控专业的实验教学中,并得到武汉大学设备处的资助。
[1] 项 俊,钟玉林,干建平.生物学实验课程创新体系的探索[J].实验室研究与探索,2008,27(10):80-82.
XIANG Jun, ZHONG Yu-lin, GAN Jian-ping. Exploration on the Innovative Experimental Course System of Biology[J]. Research and Exploration in Laboratory, 2008, 27(10): 80-82.
[2] 倪骁骅,赵忠伟.嵌入式系统在装配机器人控制中的应用[J].盐城工学院学报(自然科学版),2009,22(2):8-11.
NI Xiaohua, ZHAO Zhongwei. The Application of Embedded System in Assembling RobotControl[J]. Journal of Yancheng Institute of Technology(Natural Science Edition), 2009, 22(2): 8-11.
[3] 周 杰,陈伟海,于守谦.基于ARM的嵌入式系统在机器人控制系统中应用[J].微计算机信息,2007(2):1-2.
ZHOU Jie, CHEN Weihua, YU Shouqian. The Application of Embedded System Based on ARM for Robot Control System[J]. Microcomputer Information, 2007(2):1-2.
[4] 王 艳,沈 毅,徐立松.ARM嵌入式系统在移动机器人中的应用[J].实验科学与技术,2011,9(4):7-10.
WANG Yan, SHEN Yi, XU Lisong. Applications ARM Embedded System in Mobile Robots[J]. Experiment Science and Technology, 2011, 9(4): 7-10.
[5] 张其亮,韩 斌.“嵌入式系统”课程的实验教学研究[J].实验室研究与探索,2009,28(6):132-133.
ZHANG Qi-liang, HAN Bin. Research on the Embedded System’s Experimental Courses Teaching[J]. Research and Exploration in Laboratory, 2009, 28(6): 132-133.
[6] 勾慧兰,刘光超.基于STM32的最小系统及串口通信的实现[J].工业控制计算机,2012(9):26-28.
GOU Huilan, LIU Guangchao. Minimum System and Serial Communication Implementation Based on STM32[J]. Industrial Control Computer, 2012(9): 26-28.
[7] 拉伯罗斯.嵌入式实时操作系统uC/OS-III应用开发——基于STM32微控制器[M].何小庆,张爱华译.北京:北京航空航天大学出版社,2012.
[8] 施 华,薛广涛.机器人控制系统实时性的研究[J].计算机工程,2003,29(1):91-92.
SHI Hua, XUE Guangtao. Research on Real-time Techniques About Robot Control Sys[J]. Computer Engineering, 2003, 29(1): 91-92.
[9] 屈环宇,刘姳如.uC/OS-III的内核对象解析[J].单片机与嵌入式系统应用,2012(6):79-81.
QU Huayu, LIU Mingru. Kernel Object Analysis of uC/OC-II[J]. Microcontrollers & Embedded Systems, 2012(6): 79-81.
[10] 周阿连,陈修权,周健平.基于ARM的自主式机器人控制整体设计方案[J].大连海事大学学报,2007,33(1):135-137.
ZHOU Alian, CHEN Xiuquan, ZHOU Jianping. Whole Design Plan of The Independent Robot Based on ARM Controls[J]. Journal of Dalian Maritime University, 2007, 33(1): 135-137.
[11] 刘 森,慕春棣,赵明国.基于ARM嵌入式系统的拟任机器人控制器的设计[J],清华大学学报(自然科学版),2008,48(4):482-485.
LIU Sen, MU Chundi, ZHAO Mingguo. Humanoid robot controller based on ARM embedded system[J]. Journal of Tsinghua University (Science and Technology), 2008, 48(4): 482-485.
[12] 许贤泽.精密机械设计基础[M].北京:电子工业出版社,2012.
[13] 钱显毅,唐国兴.传感器原理与检测技术[M].北京:机械工业出版社,2011.
[14] 冯清秀,邓星钟.机电传动控制[M].五版.武汉:华中科技大学出版社,2011.
[15] 冯 洁.创新型人才培养中实验教学的问题与对策[J].实验室研究与探索,2008,27(4):102-105.
FENG JI. The Problems and Countermeasures of Experimental Teaching in Innovation-Oriented Talents Training[J]. Research and Exploration in Laboratory, 2008, 27(4): 102-105.
猜你喜欢
测控技术(2021年10期)2021-12-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
通信电源技术(2018年3期)2018-06-26
铁道通信信号(2018年2期)2018-04-18
电镀与环保(2016年3期)2017-01-20
能源(2016年2期)2016-12-01
电源技术(2015年11期)2015-08-22
电测与仪表(2015年10期)2015-04-09