过热汽温串级模糊控制系统设计与仿真
2014-02-09 03:03:14任琦梅姜建李晓锋
河南城建学院学报 2014年2期
任琦梅,姜建,李晓锋
(1.河南城建学院,河南平顶山467036;2.郏县供电有限责任公司,河南郏县467100)
锅炉过热蒸汽温度是影响锅炉运行的重要参数。过热汽温过高,会对过热器和汽轮机设备造成威胁甚至损坏,影响设备使用寿命;过热汽温过低不仅会使机组循环热效率降低,煤耗增大,而且汽轮机的安全运行也无法保证;过热汽温变化过大,除了使管材及有关部件产生疲劳外,还将引起汽轮机汽缸的转子与汽缸的胀差变化,甚至产生剧烈振动,危及机组安全运行。因此,在锅炉运行过程中,必须把过热汽温严格控制在规定范围内。
目前,火电厂过热汽温控制广泛采用喷水减温,系统结构主要采用串级控制系统。但由于过热器具有大滞后、非线性、多变量和时变等特点,当工况变化比较大时,难以保证控制品质[1]。本文在串级控制的基础上,提出串级模糊控制策略,并通过仿真对控制效果进行对比分析。
1 串级控制系统组成
采用喷水减温的过热汽温串级控制系统如图1所示。
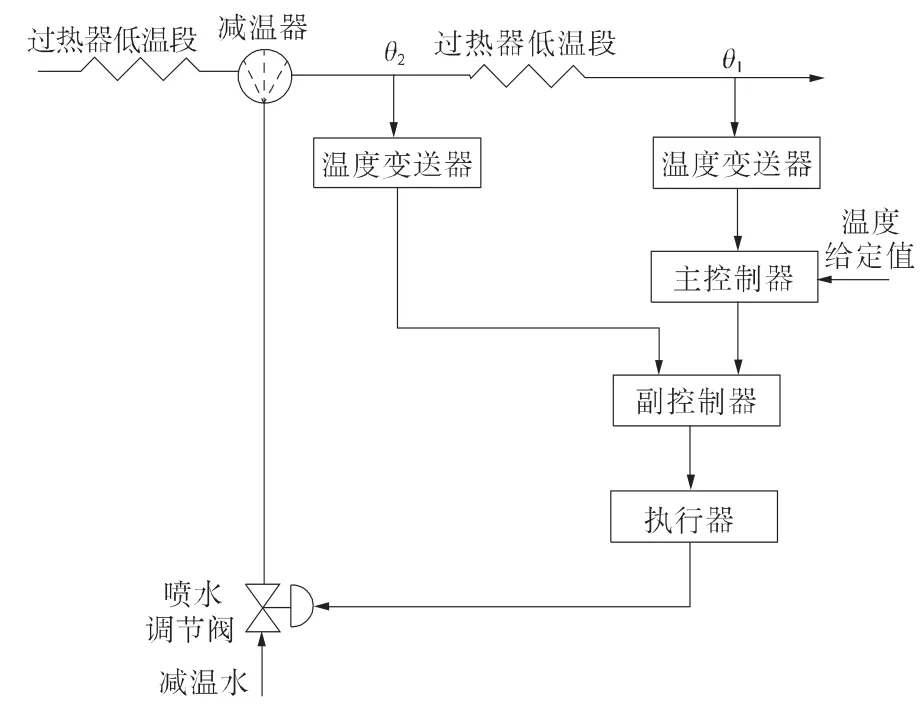
图1 过热汽温串级控制系统
有效反映减温水变化的是减温器出口的温度。为了改善系统的动态性能,本文引入减温器出口温度信号作为调节器的补充信号,以便快速反映影响过热汽温变化的扰动[2]。
过热汽温对象延迟和惯性较大,在减温水扰动下,导前汽温θ2比主蒸汽温θ1提前反映控制作用,因此采用导前汽温信号构成串级系统以改善汽温的控制质量。只要导前汽温发生变化,副调节器动作改变减温水量,初步维持减温水出口汽温在一定范围内,起粗调作用。过热器出口汽温θ1的控制是通过主调节器来校正副调节器的动作。过热汽温串级控制系统的原理如图2所示。

图2 过热汽温串级控制系统原理图
在串级过热汽温控制系统中,副回路的任务是快速消除内扰,要求调节过程的持续时间较短,但不要求无差,所以副调节器一般可选用比例调节器。当导前汽温惯性较大时,也可选用比例微分调节器。主回路的任务是维持过热汽温恒定,因此主调节器一般选用比例积分调节器。当过热汽温惰性较大时,也可选用比例积分微分调节器。
2 串级模糊控制系统组成
本文设计的过热汽温串级模糊控制系统结构如图3所示。主调节器部分在原来PID控制的基础上,并联一个基本的Fuzzy控制器。当过热汽温偏差较大时,利用模糊控制结合适当的作用量抑制干扰,保证系统快速响应,同时又保留了串级控制系统抑制内扰的特点,保证控制精度和良好的动态品质。
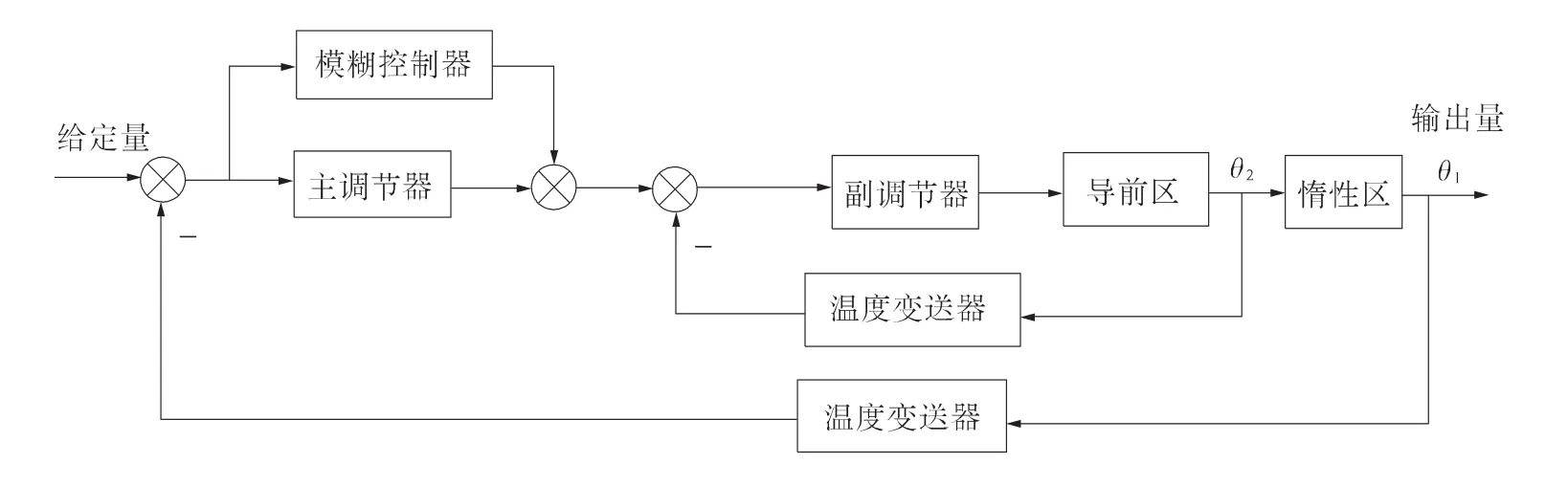
图3 过热汽温串级模糊控制系统结构图
本文中的模糊控制器采用二维结构,输入量为偏差e和偏差的变化率ec,输出量为控制量u[3]。二维模糊控制器如图4所示。

图4 二维模糊控制器
2.1 模糊语言变量设计
二维模糊控制器的输入模糊语言变量为E(温度偏差)和EC(温度偏差变化率),输出模糊语言变量为U(阀门开度)。设E、EC和U的模糊论域均为[-6,6],语言值均设定为7个,即{负大(NB),负中(NM),负小(NS),零(Z),正小(PS),正中(PM),正大(PB)}。
在Matlab中打开模糊逻辑推理系统编辑器,即可设定模糊语言变量及其高级属性,可以设定输入输出模糊语言变量各语言值的隶属函数,本文中采用三角形隶属函数。系统的决策部分采用Madani算法,解模糊化采用重心法。
2.2 模糊规则设计
设计模糊规则的主要依据是操作人员的经验和具体的技术要求。本文制定模糊规则的基本原则是:在适当考虑模糊量变化大小的前提下,当温度变化较大时,尽快消除温度偏差;当温度变化较小时,注意防止超调和保证系统的稳定性。依据火电厂操作人员“控制过热汽温的变化率,防止超调”的经验得到模糊控制的49条规则[4](见表1)。
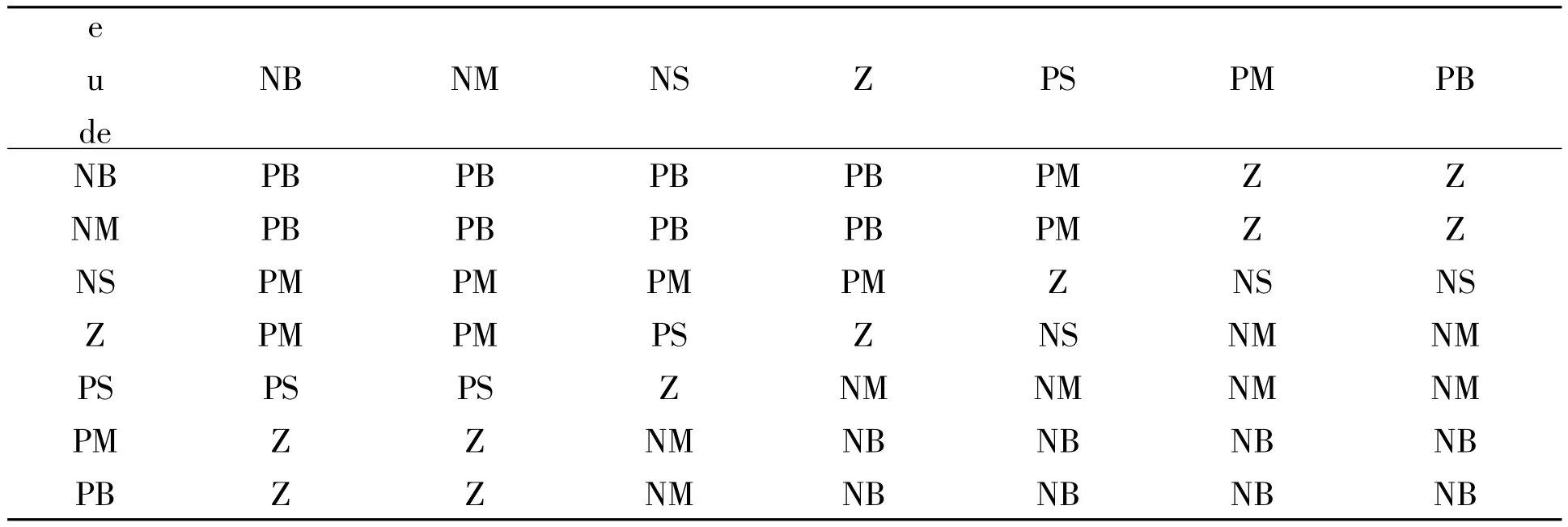
表1 模糊控制规则
用Matlab进行仿真时,可在模糊规则编辑器中编辑模糊规则,然后根据二维模糊控制器的结构搭建模糊控制器模型(见图5)。其中量化因子ke、kec和比例因子ku可以在仿真的过程中在线修改[5]。

图5 模糊控制器仿真模型
3 控制系统仿真模型的建立
以某电厂锅炉100%负荷时过热汽温的模型为仿真对象,被控对象的传递函数分别为[2]:

在Simulink中建立过热汽温串级控制系统模型(见图6)。图6中温度变送器传递函数取1,副调节器采用比例控制,主调节器采用PI控制,主、副调节器参数整定后,在仿真调试的过程中可以再适当修改,以求得到更好的控制效果。

图6 过热汽温串级控制系统仿真模型
在Simulink中建立过热汽温串级模糊控制系统模型(见图7)。图7中模糊控制模块为图5中的模糊控制器封装得到[6]。量化因子和比例因子是影响模糊控制器控制效果的重要因素。量化因子ke相当于模糊控制器的比例作用,kec相当于模糊控制器的微分作用,比例因子ku相当于总的放大倍数。量化因子可根据实际误差变化范围初步确定,并在仿真调试过程中适当调整。
4 仿真结果与分析
为便于对比分析,本文将串级控制和串级模糊控制的仿真曲线绘制在一张图上。分别对系统出现的减温水扰动、控制对象增益改变、控制对象时间常数改变、控制对象增加延迟等情况进行了仿真,结果如图8、图9、图10、图11所示。
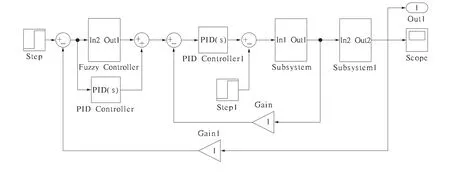
图7 过热汽温串级模糊控制系统模型

图8 1000 s时加入减温水扰动的响应曲线对比

图9 惰性区增益改为1.5时响应曲线对比

图10 惰性区时间常数改为22 s时响应曲线对比

图11 惰性区加20 s延迟时响应曲线对比
从响应曲线对比可以看出:在给定阶跃信号作用下,过热汽温串级模糊控制系统的超调量和调整时间都比较小,表现出了良好的动态品质;在减温水扰动作用下,串级模糊控制系统能更快地恢复,表现出良好的抗内扰特性;在控制对象惰性区增益变化、时间常数变化、增加延迟等数学模型发生改变时,串级控制系统的振荡增强,调整时间增大,控制品质大大下降,而串级模糊控制系统仍保持了良好的动态性能,表现出较强的自适应性和鲁棒性能。
5 结论
针对过热汽温高阶大惯性、大时滞等特点,设计了过热汽温串级模糊控制系统。仿真结果表明,串级模糊控制系统与传统的串级控制系统相比,在稳定性、快速性、准确性等方面表现出更优越的控制品质,从加入扰动和改变控制对象数学模型的仿真实验可以看出,过热汽温串级模糊控制系统对环境的适应能力更强,具有良好的鲁棒性。由于过热汽温控制对象工况复杂,包含许多不确定因素,参数变化大,串级模糊控制系统具有广泛的应用前景。
[1]左燕,侯国莲,张建华,等.复合模糊串级系统在火电厂过热汽温控制中的应用[J].现代电力,2002,19(1):64-69.
[2]谷俊杰,李建强,高大明,等.热工控制系统[M].北京:中国电力出版社,2011.
[3]谢仕宏.MATLAB R2008控制系统动态仿真实例教程[M].北京:化学工业出版社,2009.
[4]杨涛,高伟,黄树红.基于Matlab的锅炉过热汽温模糊控制系统仿真[J].华中科技大学学报,2003,31(4):3-65.
[5]范永胜,徐治皋,陈来九.基于动态特性机理分析的锅炉过热汽温自适应模糊控制系统研究[J].中国电机工程学报,1997,17(1):23-28.
[6]罗文广,韩峻峰,兰红莉.基于MATLAB(SIMULINK)语言的模糊控制系统高效仿真[J].计算机仿真,2001,18(3):14-16.
猜你喜欢
电子制作(2019年16期)2019-09-27 09:34:44
商品与质量(2018年46期)2018-12-08 06:50:28
电站辅机(2017年3期)2018-01-31 01:46:39
东北电力技术(2017年4期)2017-05-17 09:36:44
电力与能源(2017年6期)2017-05-14 06:19:45
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:42
科学中国人(2015年26期)2015-03-12 03:17:05
自动化博览(2014年9期)2014-02-28 22:33:27