车路协同系统一体化仿真实验平台
2014-02-05 02:02吴志周
实验室研究与探索 2014年2期
孙 剑, 吴志周
(同济大学 道路与交通工程教育部重点实验室, 上海 201804)
0 引 言
智能交通系统(Intelligent Transportation System,ITS)是将先进的信息技术、通讯技术、传感技术、控制技术以及计算机技术等有效地集成运用于整个交通运输管理体系,而建立起的一种在大范围内、全方位发挥作用的,实时、准确、高效的综合的运输和管理系统。自上世纪90年代起,先进的交通管理系统、先进的交通信息系统以及先进的公共交通系统等ITS子系统相继被研发并投入应用。近十多年来,电子信息和无线通信技术的迅速发展与应用,推动了以车车、车路通信为基础的“车路协同系统”(Connected Vehicle System,CVS)系统的规划实施[1]。美国交通运输部在关于ITS的发展计划中指出CVS是ITS研究的必经阶段,并将其列在未来九大发展领域的第二位,日本、欧盟也都开展了一系列CVS研究,并在大规模进行示范工程建设。鉴于CVS对未来科学技术的重大需求推动,国内也相应在交通工程、通信工程、车辆工程等本科生及研究中专业中开设了“智能交通系统”、“车路协同系统”、“车载自组织网络”、“智能车辆”等本科生及研究生课程。
由于CVS技术发展日新月异且属于多学科集成创新,长期以来,学生在各门课的学习过程中,只能依靠书本的感性认识、教师课堂讲解以及演示系统来获取CVS相关知识,缺乏与CVS系统之间的互动,同时每门课都侧重于CVS的一个方面,缺乏一个一体化的交互实验平台,可以让学生不仅进行演示性实验,还可进行交互实验和探索实验。
1 CVS系统实验平台需求分析
交通系统仿真是再现交通流运行规律,对交通系统进行管理、控制和优化的重要实验手段和工具。由于CVS系统正处于开发试验阶段,无法实地实验,利用系统仿真工具则可以对CVS系统的各项功能进行实验分析。VII 系统的发展使得交通系统仿真实验平台从重点是对车、路以及环境的模拟逐渐演变为对人、车、路、环境以及信息的仿真。信息的覆盖范围、发送频率、连接性能以及处理能力等都影响着CVS环境下个体及多个车辆的协同驾驶行为,因此必须整合交通流模型(人、车因素)、车载通讯环境(信息因素)以及车路协同应用(信息对人、车行为的影响)这3类仿真组成要素才能全面、科学地对VII 环境下的交通系统进行仿真评价。现有成熟的交通流仿真软件(Traffic Flow Simulation,TFS)可以全面细致的模拟传统交通流环境下的交通行为,但是却无法满足车路协同环境下车车、车路通信的仿真需求并反应出由此产生的对交通流特性的影响和改变。而车载通讯仿真软件(Communication Network Simulation, CNS)则仅关注于通讯过程的模拟,并不能模拟车辆在交通网络中的运行[2]。CVS仿真实验平台应综合考虑交通流模型,通讯环境以及车路协同应用的交互影响。唯有这样,CVS系统的性能才能精确的被测试和实验,而不同专业的学生在进行实验分析时,则可以有选择地进行实
验测试,但其实验结果会受到各个部分参数的影响。
2 实验平台技术比选
根据三种系统要素的不同作用方式,CVS仿真实验平台可以分为3种实现方法,即基于简化通讯模型的CVS实验平台、基于交通/通讯仿真器松耦合的CVS仿真实验平台、基于交通/通讯仿真器紧耦合的CVS仿真实验平台。
2.1 基于简化通讯模型的CVS实验平台
基于简化通讯模型是指车车、车路的通讯过程直接由一个简化的通讯模块完成,通常只考虑通讯距离,用户应用层消息发送间隔以及数据包丢失概率等一些较简单的统计参数,将通讯过程参数化而不是像基于离散事件的通讯仿真器那样对通讯网络的各个层次做微观的仿真。另一方面,车路协同应用策略在交通仿真软件的基础上由二次开发完成[3]。典型的基于简化通讯模型的CVS实验平台如图1所示。该系统一般包括4个模块:① 微观交通仿真模块主要模拟真实世界的仿真运行,独立工作时相当于无VII环境的交通流运作,可以直接应用成熟的商品化交通仿真软件;② CVS通讯模块负责模拟车载单元和路边单元在CVS环境下的通信行为;③ 策略应用模块描述具体应用的逻辑过程;④ 数据库模块为其他三种模块的计算结果提供贮存空间,并进行统计运算CVS系统的运行指标。
虽然基于简化通讯模型的车路协同仿真可以采用统计模型代替基于离散事件的通讯仿真过程,提高了仿真效率,但是没有考虑通讯网络中路由选择、信道容量、数据包碰撞丢失、信号遮挡等具体细节,统计模型的标定和验证需要以大量仿真数据为基础,其通讯过程及结果的真实性和准确性仍存在不足。
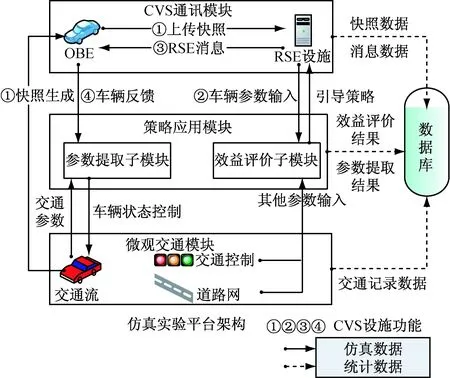
图1 基于简化通讯模型的CVS仿真实验平台
2.2 基于交通/通讯仿真器松耦合的CVS仿真实验平台
基于交通/通讯仿真器松耦合的车路协同仿真其目的是在通讯仿真软件中表达“真实”的车辆运动轨迹,用于研究车载自组织网络的通讯性能以及与交通运行弱相关的应用,如互联网接入服务、交通监控管理等。该实现方法中,通讯仿真由专用的通讯仿真软件完成,但是交通仿真与通讯仿真并不是并行运行的,通讯仿真中移动无线节点的运动由数学模型产生的移动轨迹或交通仿真软件导出的车辆仿真轨迹决定。
目前有许多商业或非商业的通讯仿真软件可以用于车载通讯网络建模仿真,最的常用的有OMNeT++,NS2,Qualnet以及SWANS/Jist,但是这些通讯仿真软件中都缺乏可以表达恰当的车辆运动的功能。为了解决此问题,探索了如何在这些通讯仿真软件中表达“真实”的车辆运动,最通常的方法是通过编写分析器从外部读取车辆运动轨迹并导入通讯仿真软件。车辆移动轨迹是指一组车辆出行过程中按照时间戳记录下的运动,包括所有这些车辆整个出行过程中在每一个时间步上的位置、速度、加减速以及运动方向信息。这些轨迹可以源自于某些数学模型,也可以是真正的车辆GPS轨迹,抑或者是微观交通仿真软件。
2.3 基于交通/通讯仿真器紧耦合的CVS仿真实验平台
为了将车载通讯网络、交通流仿真以及车路协同应用作为一个整体来仿真,必须将现有的交通仿真软件与通讯仿真软件紧密结合,实现不同仿真器之间的紧耦合。在这种方式中,交通流仿真由交通仿真器执行,车车、车路通讯仿真由通讯仿真器执行,车路协同应用也由独立的应用策略成员实现,三者并行执行进行仿真运行时的连续数据交换和时间管理,可以完成对三种仿真要素的有机结合。在仿真过程中,通讯仿真器的节点实时跟踪车辆的运动轨迹,两者一一对应,同时完成对应用策略成员产生的通讯需求的仿真;交通仿真器在收到通讯仿真的结果后再根据具体的应用策略完成对车辆驾驶行为的反馈。相对于松耦合的仿真方式,紧耦合的仿真方式形成完整的反馈环,通讯仿真的结果根据特定的应用策略逻辑对交通仿真软件中的车辆驾驶行为产生影响,可以对各种丰富的车路协同应用做全面评价。表1对交通/通讯仿真器两种耦合方式的主要特点做了比较总结。

表1 交通/通讯仿真器耦合方式比较
3 一体化实验平台开发
CVS系统的一体化实验平台需要将车载通讯网络、交通流仿真以及车路协同应用作为一个整体来仿真,只有基于交通/通讯仿真器紧耦合的CVS仿真实验平台才能满足不同仿真器之间的动态耦合,真正实现CVS的一体化实验平台。基于必须将现有的交通仿真软件与通讯仿真软件紧密结合,实现不同仿真器之间的紧耦合。其开发关键包括仿真模型选择、一体化整合技术。
3.1 交通仿真模型选择
目前常用的商用化交通仿真模型有VISSIM、PARAMICS、AIMSUN等,SUMO模型由于其开源特性,也得到了一定的应用。本研究采用VISSIM作为CVS实验平台的交通仿真组件。VISSIM[4]是由德国PTV公司开发的微观交通流仿真系统。该系统是一个离散的、随机的、以0.1 s为时间步长的微观仿真软件。VISSIM可以作为许多交通问题分析的有力工具,它能够分析在诸如车道特性、交通组成、交通信号灯等约束条件下交通运行情况,不仅能对交通基础设施实时运行情况进行交通仿真实验,而且还可以文件的形式输出各种交通评价参数,如行程时间、排队长度等。与SUMO相比,VISSIM在交通仿真方面有许多优点,不仅可完善地对各种交通场景进行实验,同时向用户提供组件对象模型COM接口以及外部驾驶员模型动态连接库DLL,可实现仿真运行时的实时控制,为实现与通讯仿真软件的一体化整合提供了有利条件。
3.2 通讯仿真模型选择
目前有许多商业或非商业的通讯仿真软件可用于车载通讯网络的建模仿真,最常用的有OMNeT++,NS2,Qualnet以及SWANS/Jist。NS2是一个开源的离散事件网络仿真器,支持有线网络和无线网络,包括许多MANET路由协议,也包括802.11MAC的实现[5]。NS2是学术领域研究无线网络应用最广泛的仿真器。NS2核心代码用C++语言,用户与NS2的交流采用TCL或者Otcl脚本文件,通常只按照静态脚本文件执行仿真;当仿真完成以后NS将会产生一个或多个基于文本的跟踪文件。
3.3 一体化整合方法
本研究通过高层体系架构(High Level of Architecture,HLA)仿真建模思想整合VISSIM与NS2,实现仿真时间管理、跨平台数据交互、联邦成员互操作、仿真进程控制、应用策略灵活集成等主要功能。
考虑到NS2需要工作在Linux环境下涉及到跨平台通信,并且需要对OTCL模拟脚本进行功能扩展以符合动态交互仿真的需要,采用半集中式的RTI(Running Time Infrastructure)结构开发了RiVins(Run-time infrastructure for VISSIM and NS2)组件,在OTCL模拟脚本中开发LRC(Local RTI Component)本地RTI组件;WINDOWS平台下开发CRC中心RTI组件,通过在两者之间建立TCP连接实现跨平台数据交互,由LRC与CRC协商完成时间管理、联邦成员数据分发等联邦服务。VISSIM/NS2联邦仿真体系架构如图2所示。
联邦中核心部件是RiVins运行时支撑环境组件,主要完成联邦执行的创建/撤销、交互参数的发送接收、对象类的公布/订购、联邦运行时对各联邦成员的时间管理,数据分发。RiVins包括Linux环境下的LRC本地RTI组件和Windows环境下的CRC中心RTI组件,两者通过通讯模块建立一个可靠的TCP连接实现跨平台的数据交互。其中LRC通过OTCL工具命令语言集成在一个NS2的仿真执行脚本文件中,而CRC为独立模块。联邦成员主要包括通讯仿真器NS2,交通仿真器VISSIM,CVS应用策略成员以及仿真控制成员。
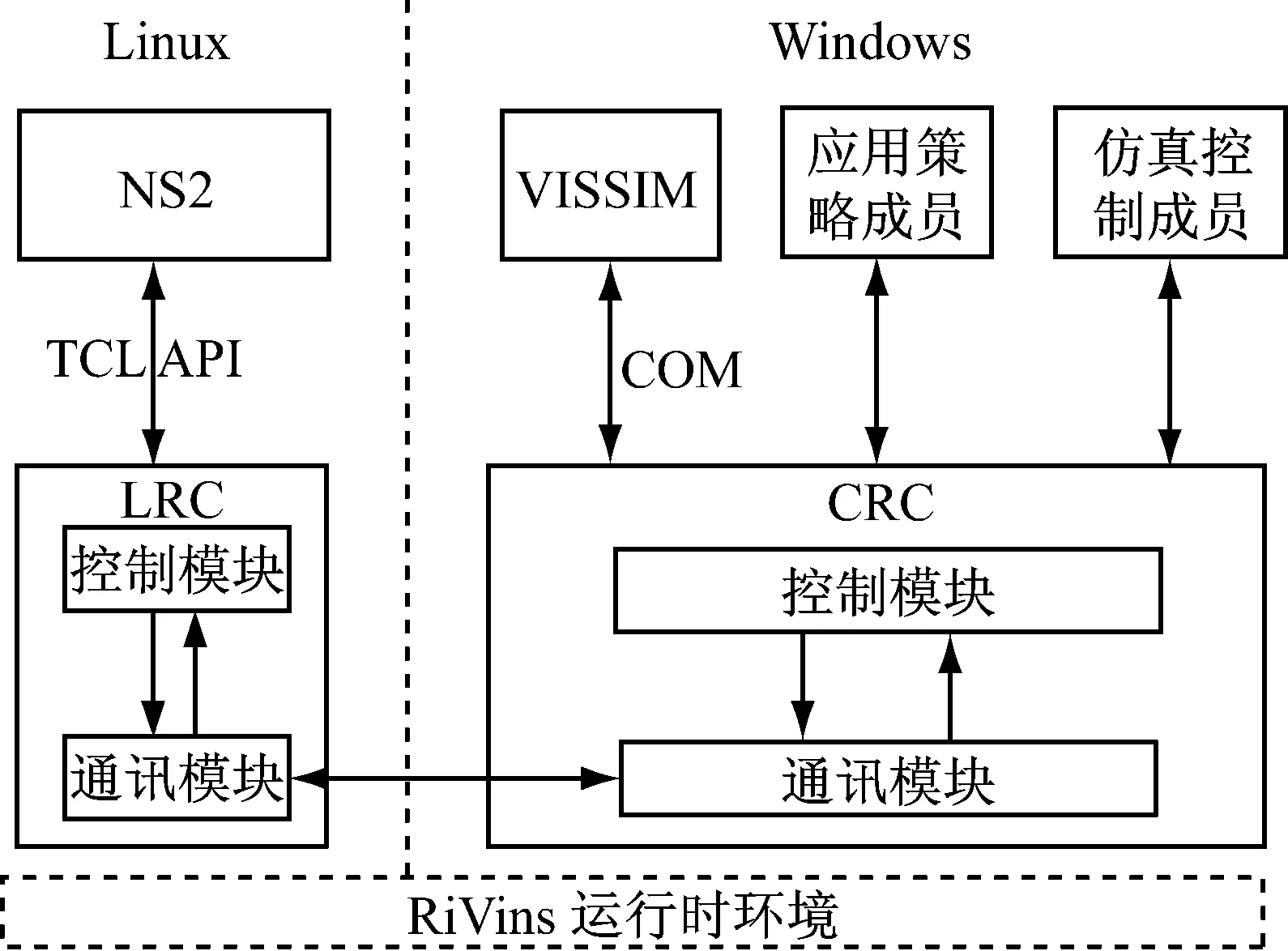
图2 联邦体系架构
3.4 整合案例
本案例中选择NS2-2.33版本运行于cygwin操作系统平台下,结合VISSIM5.1完成仿真原型系统的构建,CVS系统应用场景为交叉口速度引导。其中仿真控制成员完成部分仿真参数的设置,结果输出以及仿真过程的控制监控。参数设置包括仿真时长、仿真时间精度、交通环境参数设置等,结果输出用于统计仿真过程中交叉口进口道的车辆延误和停车次数指标,交通仿真场景如图3(a)所示;通讯仿真的评价则由NS2的附加功能另外独立完成。仿真监控功能则用于实时记录显示仿真过程中消息发送接收、仿真进度、速度引导计算结果等信息。通讯模拟过程的图形展示由Nam模块支持,可以观察到在NS2中代表车辆和通讯设施的移动节点的运动、通讯仿真中无线电信号的传播,如图3(b)所示。
(a) 交通仿真器车辆运行

(b) 通讯仿真器移动节点运行
4 结 语
车路系统是未来ITS发展的核心,包括交通工程、通信工程及车辆工程在内的本科生及研究生专业纷纷开设相关课程,以满足社会人才培养的需求。本文提出的一体化实验平台是对车路协同系统交互式实验环境建设的一次尝试,不同专业的教师和学生可根据本实验工具的功能组件进行重点测试和分析。该实验平台不仅可作为学生的基础实验工具,经过进一步开发,还可作为车路协同系统研发测试的重要工具。
[1] Intelligent Transportation Systems, United States Department of Transportation. Five-year ITS Program Plan-PART II: The ITS Research: Initiatives, Programs, and Related Research [EB /OL].http://www.itsdocs.fhwa.dot.gov/JPODOCS/REPTS_TE/14289/plan2-5.htm.
[2] 肖 玲,李仁发,罗 娟. 车载自组网的仿真研究综述[J].系统仿真学报,2009,21(17): 5330-5335.
XIAO Ling, LI Ren-fa, LUO Juan. Simulation of vehicular Ad Hoc networks: a survey [J]. Journal of System Simulation, 2009, 21(17): 5330-5335.
[3] Shenyang Chen, Jian Sun, Jing Yao. Development and Simulation Application of a Dynamic Speed Dynamic Signal Strategy for Arterial Traffic Management[C]//The 14th International IEEE Conference on ITS. Washington, DC, USA. 2011 .Pp: 1349-1356.
[4] PTV A G.VISSIM 5.20 User Manual[M]. Karlsruhe,Germany. 2009.
[5] 方路平.NS-2网络模拟基础与应用[M].北京: 国防工业出版社,2008.
[6] Moritz Killat, Felix Schmidt-Eisenlohr, Hannes Hartenstein, Christian Rössel, Peter Vortisch, Silja Assenmacher, Fritz Busch. Enabling efficient and accurate large-scale simulations of VANETs for vehicular traffic management [C]//Proceedings of the fourth ACM International Workshop on Vehicular Ad Hoc Networks (VANET), 2007: 29-38.
[7] Hema Tanikella, Brian L Smith, Guimin Zhang,etal. Development and evaluation of a vehicle-infrastructure integration simulation architecture[J]. Journal of Computing in Civil Engineering. 2007, 21(6): 434-440.
[8] Gustavo Maria, Giovanni Pau, Enzo De Sena, Eugenio Giordano, and Mario Gerla. Evaluating vehicle network strategies for downtown Portland: opportunistic infrastructure and the importance of realistic mobility models[C]//In MobiOpp ’07: Proceedings of the 1st International MobiSys Workshop on Mobile Opportunistic Networking. 2007: 47-51.
[9] Devan Bing Rehunathan, Boon-Chong Seet, and Trung-Tuan Luong. Federating of MITSIMLab and ns-2 for realistic vehicular network simulation[C]//In Mobility ’07: Proceedings of the 4th International Conference on Mobile Technology, Applications, and Systems. 2007: 62-67.
[10] Harri J, Fiore M, Filali F, Bonnet C. Vehicular mobility simulation with VanetMobiSim[J], Simulation; 2011.87(4): 275-300.
[11] Rieck, D. Schünemann, B. Radusch, I.etal. Efficient traffic simulator coupling in a distributed v2x simulation environment[C]//in: SIMUTools’10: Proceedings of the 3rd International ICST Conference on Simulation Tools and Techniques. 2010:1-9.
猜你喜欢
中国计算机报(2020年9期)2020-03-25
汽车观察(2019年2期)2019-03-15
测控技术(2018年2期)2018-12-09
铁路计算机应用(2018年4期)2018-05-03
中国交通信息化(2018年12期)2018-03-21
西南交通大学学报(2016年3期)2016-06-15
中国工程咨询(2016年1期)2016-02-14
数学年刊A辑(中文版)(2014年1期)2014-10-30
测绘科学与工程(2013年2期)2013-03-11
空间控制技术与应用(2010年3期)2010-12-23