
TRIZ 理论在斜行电梯结构改进设计中的应用研究
2014-01-20 03:24张浩
扬州职业大学学报 2014年4期
张 浩
(扬州职业大学,江苏 扬州 225009)
在日常生活中,大家对普通的垂直电梯和自动扶梯比较熟悉,但随着社会进步生活水平的提高和电梯技术的快速发展,特别是为了解决城区面积紧张问题,某些国家和地区在山坡地区建设住宅,产生了对一种新型的特种电梯即斜行电梯的需求。除此之外,在旅游观光景点或钢结构的电视塔脚处,也出现了斜行电梯的身影。由于斜行电梯多安装在露天场合,轿厢的振动和噪声大于垂直升降电梯,电梯起动和制动时产生影响舒适度和安全性的水平作用力,对斜行电梯的设计和生产提出了新的要求。
1 目前斜行电梯的使用状况
自21 世纪以来,为了残疾和行动不便的人的出行方便以及解决斜坡上的交通问题,逐渐出现了斜行电梯。斜行电梯主要用于完成倾斜运行轨迹的提升,下面以曳引式斜行电梯为例进行叙述,其工作原理是通过钢丝绳或链条悬挂,并且与水平面呈一定的角度,以达到运输人员或货物的目的。[1]此外,因为水平作用力的原因,斜行电梯水平加、减速度被限制在0.5m·s-2以内,实际上只适用于1m·s-1以下的电梯,这就限制了斜行电梯的应用。[2]因此,为了提高斜行电梯的运行速度同时不影响乘客的舒适度,需要对斜行电梯的结构进行改进设计。
2 TRIZ 理论
2.1 TRIZ 的含义
TRIZ 的含义是发明问题的解决理论,其英文全称是Theory of the Solution of Inventive Problems,在欧美国家也可缩写为TIPS(Theory of inventive Problem Solving)。
前苏联著名的发明家、教育家阿利赫舒列尔在1946 年创立了TRIZ 理论,Altshuller 也被尊称为TRIZ 之父。通过对世界各国著名的发明专利过程的处理,Altshuller 从1946 年开始研究发明问题的解决理论,找出创造发明的内在规律和原理,可以加快创造发明的进程和设计出一流的创新产品。Altshuller 发现不同行业、不同领域的产品改进、技术变革和创新都是有规律可循的,只要掌握了这种规律(即可以遵循的科学方法和法则),就可以主动地设计产品并推测出产品的未来发展趋势。[3]
2.2 冲突解决原理
在进行产品设计的时候发现矛盾(冲突),传统的设计方法通常是采取折衷的方法,两利相权取其重,两害相权取其轻,但是这样做并没有彻底解决冲突。TRIZ 理论则要求在设计过程中完全解决冲突,提出全新的设计方案,实现产品的真正创新。
在设计过程中,单纯的增强有利的效应或者消除不利的效应并不能真正解决问题,反而会引起其它一个或多个方面的不利效应,这被称之为技术冲突。
TRIZ 理论通过对现实中的各种冲突进行分析和归纳,提出了39 个通用工程参数(表1)。在实际的设计过程中,可以用至少2 个工程参数来表示组成冲突的双方内部性能,然后在冲突矩阵中找出解决冲突的发明原理。
在冲突矩阵表(表3)中,按照代表恶化的技术特性水平排列,代表改善的技术特性垂直排列的方式依次将39 个通用工程参数进行排列。冲突矩阵为40 行40 列的一个矩阵,根据矩阵中数字编号可以选用发明原理表(表2)中的对应原理,然后根据这些发明原理来考虑具体的解决方案。

表1 通用工程参数表
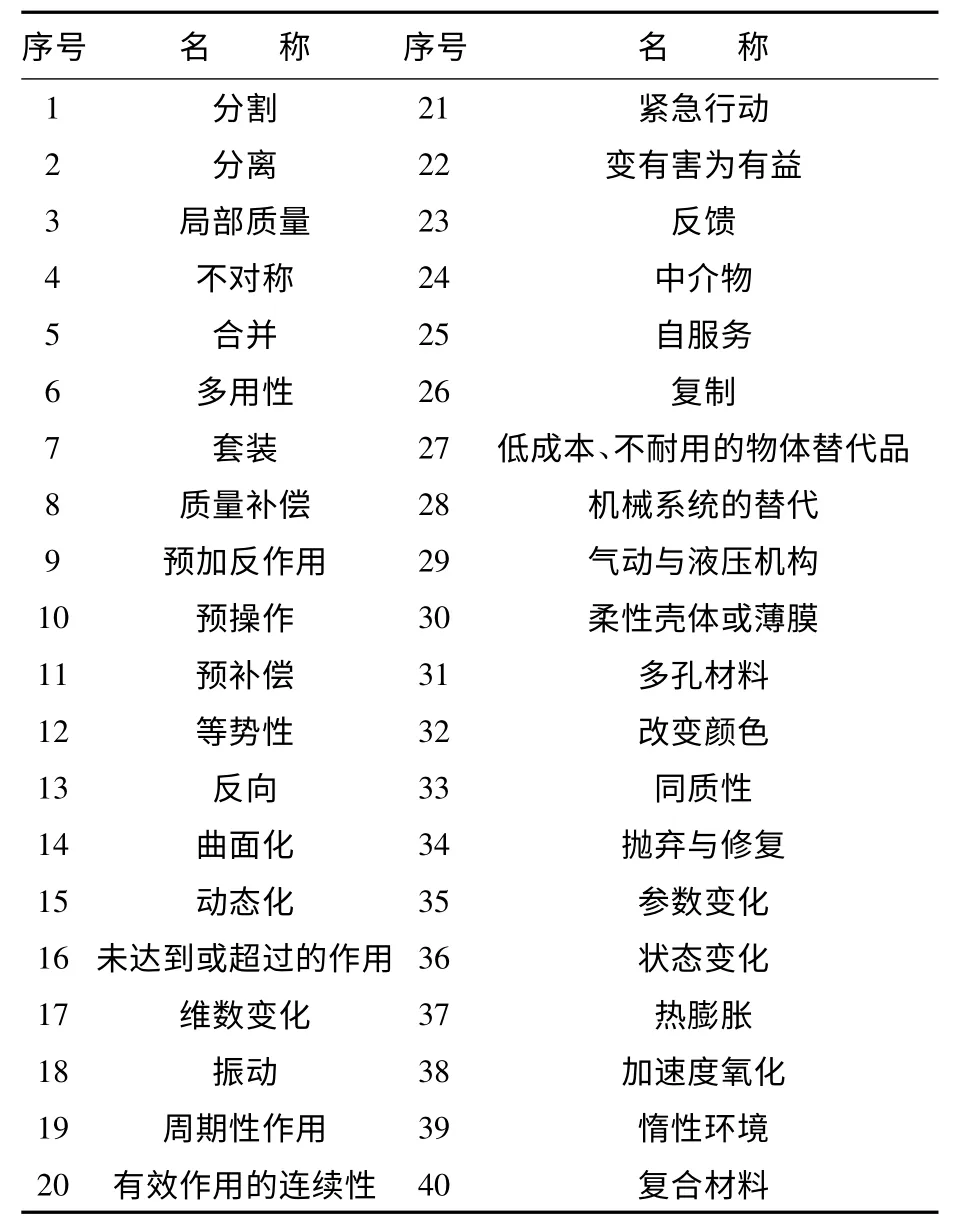
表2 发明原理表

表3 冲突矩阵表
3 利用TRIZ 理论提出结构设计方案
3.1 分析问题
通过查阅相关的资料发现,目前已经投入使用的斜行电梯运行速度还比较低,一般不超过1.0m·s-1,对电梯的水平加速度和乘客的舒适感的影响较小,但是随着人们对斜行电梯运行速度的要求不断提高,特别是当运行速度超过2m·s-1之后,其对电梯和乘客的影响就比较突出了。
因为在起动和制动运行时斜行电梯会产生水平作用力,让乘客感到不舒服和不安全。为了提高舒适度和安全性,就要减小这种水平作用力,也就是要减小水平加速度,从而导致电梯运行速度和效率大为降低。但是,如果提高斜行电梯的运行速度,其水平加速度也必然会提高,使乘客感到不舒适。这就在运行速度和舒适度之间产生了一个矛盾(冲突)。
3.2 斜行电梯结构设计中的速度和舒适度的冲突分析
电梯结构设计中的冲突很多,经常碰到的是速度和舒适度的冲突,斜行电梯也存在这样的问题,而且问题比垂直电梯更突出。斜行电梯的速度是希望改进的,而速度的改进导致舒适度的恶化,即稳定性的恶化。利用表3 冲突矩阵表,发现希望改进参数9 强度,但是恶化了参数13 稳定性,二者相交的数字是1、18、28、33,即采用表2中1、18、28、33 四个原理可以解决冲突。
3.3 TRIZ 在斜行电梯结构改进设计中的应用
根据TRIZ 的解决原理,提出了一种改进的可变角度倾斜机构的设计方案,如图1、2 所示。

图1 倾斜机构简图
3.3.1 倾斜机构设计
该可变角度倾斜机构是由控制系统、机电作动器和倾斜执行机构三个部分组成。[4]根据电梯是起动还是制动,先由控制系统控制作动器向左或者向右移动,接着作动器带动倾斜执行机构使轿厢产生一定角度的倾斜,最后由检测系统对倾斜的角度进行检测,反过来调节作动器移动的幅度。

图2 倾斜机构工作示意图
此外,当发生断电等特殊情况的时候,作动器没有动力输出,而倾斜机构因为左右对称,轿厢在自身重力作用下将自动回正。可以防止紧急情况下,轿厢由于不能自动回正而导致倾覆的危险。
3.3.2 倾斜机构控制系统原理
该机构首先通过加速度传感器测量轿厢的水平加速度信号,然后通过处理过的加速度信号控制作动系统进行一定角度的倾斜,以改善因水平加速度造成的不适感,其控制系统原理图如图3所示。

图3 控制系统原理图
3.3.3 Matalab 仿真
仿真结果表明,电梯在空载上行时轿厢的振动加速度值最大,可通过Matlab 软件针对这一点进行优化以获得最佳的运行速度(图4)。
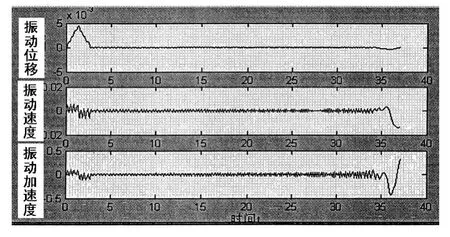
图4 沿导轨方向的振动位移、振动速度、振动加速度
4 结论
本文通过对TRIZ 发明问题解决理论的介绍,把TRIZ 理论应用于斜行电梯的结构设计,最后提出一种可变角度倾斜机构设计方案,解决了斜行电梯舒适度随着运行速度的提高而降低的问题,再一次证明TRIZ 理论是一种有效的创新设计方法。
[1] 姜淑雄. 斜行电梯设计浅谈[J]. 电梯工业,2006(5):13 -14.
[2] 贾涛,岑理章,王昕.非线性变频电梯调速系统算法的研究[J].电气时代,2009(7):62 -63.
[3] 王芍.基于蒙特卡罗模拟在天气期权定价中的运用[J].电科技经济市场,2014(2):109 -110.
[4] 张浩,芮延年. 快速斜行电梯关键结构设计和动态特性研究[D].苏州:苏州大学,2010.
猜你喜欢
建材发展导向(2022年3期)2022-04-19
一重技术(2021年5期)2022-01-18
纺织科学研究(2021年9期)2021-10-14
铁道通信信号(2020年1期)2020-09-21
保健医苑(2020年1期)2020-07-27
中国特种设备安全(2019年4期)2019-05-20
中国特种设备安全(2019年2期)2019-04-22
数学物理学报(2019年1期)2019-03-21
浙江工业大学学报(2017年5期)2018-01-22
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16
