
基于BP神经网络的磁罗盘误差补偿研究
2014-01-16 05:57:46邵婷婷樊延虎吕浩北
电子设计工程 2014年14期
邵婷婷,樊延虎,吕浩北,郭 娜
(延安大学 物理与电子信息学院,陕西 延安 716000)
磁罗盘是利用地磁场来实现定向功能的装置,广泛应用在航空、航海、车载定位、地质勘探、深海探测等领域[1]。随着微处理器技术的发展,尤其是单片机技术的广泛应用,结合利用先进加工工艺生产的磁阻传感器,为导航系统的数字化提供了有利的帮助,是未来磁罗盘的发展方向[2]。本文基于磁阻传感器HMC1052/1051Z和MEMS加速度计ADXL203研制了一款磁罗盘样机,分析了样机工作过程中可能存在的误差及其来源,建立了以测量航向角为输入、补偿后的航向角为输出的三层BP神经网络模型,经该算法补偿后的样机航向角精度可提高至±0.50以内。
1 测量原理与误差分析
本文研制的磁罗盘框图如图1所示。该系统主要基于磁阻效应,根据磁场大小来确定方向。
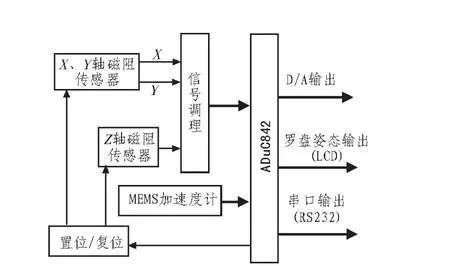
图1 磁罗盘结构框图Fig.1 Assumption diagram of magnetic compass
MC1052/HMC1051Z分别感测载体坐标系下地球磁场X、Y、Z轴的分量 Ux1,Uy1,Uz1,MEMS加速度计ADXL203通过感知地球重力加速度在其测量轴上的分量大小而确定俯仰角φ和翻滚角θ,根据理论公式(1)、(2)[3],可求得折算到地平坐标系中相同航向下地磁场在X轴和Y轴的分量Hx和Hy,则航向角φ可根据公式(3)求得。据罗盘坐标系和水平坐标系变换的分析以及样机的实际运行情况,根据文献[4]介绍的方法对航向角作相应的处理,使之能在00~3600的范围表示。
磁罗盘的误差主要可以分为两类[5]:第一类是系统自身存在的误差,包括制造误差、安装误差,该部分对系统精度影响较小;第二类是由磁罗盘周围工作环境因素造成的误差,主要指罗差,罗差对电子罗盘系统的精度影响最大,可达几十度。本文在软件上首先采用中值滤波算法对数据进行预处理,基于BP神经网络,建立以测量航向角为输入、补偿后的航向角为输出的三层BP神经网络模型,对误差进行补偿校正。
2 BP神经网络误差补偿模型建立
2.1 BP神经网络
前馈神经网络是一种基于监督学习的人工神经网络,它能够通过学习已知样本而掌握经验,从而对未知样本做出判别,适合于曲线拟合、模式识别等领域[6]。BP神经网络是一种多层的前馈型神经网络,一般包括一个输入层、若干个隐层和一个输出层。BP网络采用梯度下降的误差反向传播算法对样本进行训练[7],网络训练分为批处理模式和递增模式,本文采用的是批处理模式。
2.2 误差模型的建立
对设计的样机在水平状态时,航向角从00~3600每隔150共24个实验点获取训练样本,未经补偿的航向角误差在00~3600近似于正弦曲线,且绝对值最大可达三十几度,如图2所示。本文以此为训练样本,利用MATLAB 神经网络工具箱进行BP神经网络模型的建立。并采用贝叶斯归一化学习算法训练网络,以确定网络参数。

图2 航向角样本误差图Fig.2 Magnetic course angle sampling error diagram
1)BP神经网络结构的确定
数学上已经证明了BP神经网络可实现任何复杂的非线性映射,理论上,一个三层的神经网络,能够以任意精度逼近给定的函数[8]。本文采用以测量航向角为输入、补偿后的航向角为输出的三层BP神经网络结构,隐含层传输函数采用S型函数logsig,输出层传输函数采用线性函数purelin。
2)输入、输出量的处理
在工程领域中,使用BP神经网络好坏的关键是输入量训练样本的优劣,为提高训练样本集的代表性,加快网络训练的收敛性,本文将输入的实测航向角用公式(4)做了归一化处理,使航向角训练样本能够集中在区间[-1,1]中。

式中,Pn为归一化后的航向角测量值,Pmax,Pmin为测量值的最大值和最小值,P为航向角的原始测量值。训练后对输出量采用公式(5)作反归一化处理。

3)隐层神经元个数的确定
隐层神经元个数的确定是BP神经网络模型建立的关键技术之一,可根据+(0~10)来确定。本文输入层和输出层节点数均为1,经过不同隐层神经元个数的尝试,本文最终确定网络的隐层神经元个数为6。
3 仿真实验及结果分析
网络模型建立并训练完毕之后,让样机在水平状态下,航向角从 每隔 共24个实验点再测得一组航向角,将该数据作为建好的BP网络模型的输入,经仿真后得到补偿后的航向角。表1为磁罗盘样机采用该BP神经网络算法,误差补偿前后的航向角和误差。
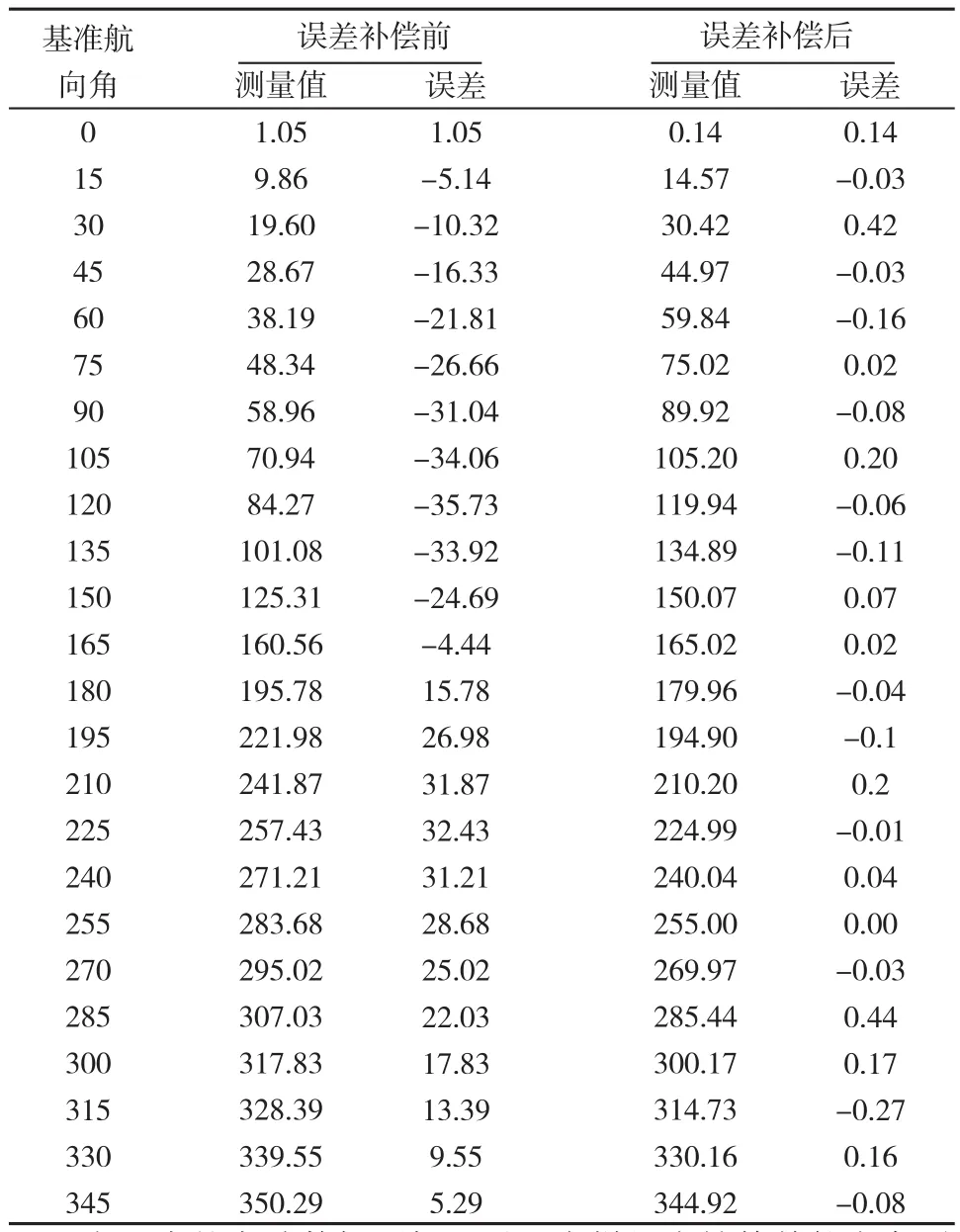
表1 航向角测量数据Tab .1 Course angle measurement data
由上表的实验数据可知,磁罗盘样机在补偿前航向角误差最大可达±35.73°,经过该BP神经网络算法补偿后航向角误差大大减小,实验点的航向角误差均在±0.5°以内。
4 结束语
基于磁阻传感器HMC1052/1051Z和MEMS加速度传感器ADXL203研制的磁罗盘样机,系统成本低、体积小、功耗低。利用地球磁场测量航向,易受外界磁场干扰,利用前馈神经网络算法,建立了以测量航向角为输入、补偿后的航向角为输出的三层BP神经网络模型,并用样机的采样数据进行仿真验证,实验证明,该BP神经网络误差补偿仿真稳定,补偿效果好,航向角精度可提高至±0.5°以内,研制的样机可应用于普通导航领域。
[1] Vcelak J , Ripka P , Kubik J , Platil A , Kaspar P. AMR Navi2gation Systems and Met hods of Their Calibration[J ] . Sensors and Actuators 2005 ,1222128.
[2]王勇军, 李智, 李翔. 三轴电子罗盘的设计与误差校正[J].传感器与微系统, 2010, 29(10): 110-112.WANG Yong-jun, LI Zhi, LI Xiang. Design and error calibration of three-axis electronic compass [J]. Transducer and Microsystem Technologies, 2010, 29(10): 110-112.
[3] 金海红, 吴东升, 田柳. 倾斜补偿式地磁传感器的设计与误差补偿方法[J]. 传感器与微系统, 2010, 29(10): 33-36.JIN Hai-hong, WU Dong-sheng, TIAN Liu. Design and error compensation method of tilt compensated earth magnetism sensor [J].Transducerand Microsystem Technologies, 2010, 29(10): 33-36.
[4]邵婷婷,马建仓,胡士峰,等.电子罗盘的倾斜及罗差补偿算法研究[J].传感技术学报,2007, 20(6):1335-1337.SHAO Ting-ting, MA Jian-cang, HU Shi-feng. Research ontilt and environment error compensation based on electronic compass[J]. Chinese Journal of Sensors and Actuators, 2007, 20(6): 1335-1337.
[5] 马建仓, 胡士峰, 邵婷婷. 三轴磁阻电子罗盘设计[J]. 火力与指挥控制, 2009, 34(3): 142-144.MA Jian-cang, HU Shi-feng, SHAO Ting-ting ,et al. Design of A 3-axes magnetoresistive electronic compass [J]. Fire Control and command control, 2009, 34(3): 142-144.
[6]曲建岭, 高峰, 李富荣,等. 基于人工神经网络的磁航向误差校正方法[J]. 计测技术, 2006, 26(3): 8-9.QU Jian-ling, GAO Feng, LI Fu-rong ,et al. Error revising method for magnetic course based on artificial neural network [J].Metrology& Measurement Technology, 2006, 26(3): 8-9.
[7]王璐, 赵忠, 邵玉梅,等. 磁罗盘误差分析及补偿[J]. 传感技术学报,2007, 20(2):439-441.WANG lu, ZHAO Zhong, SHAO Yu-mei , et al. To analyze and compensate errors of magnetic compass [J]. Chinese Journal of Sensors andActuators, 2007, 20(2): 439-441.
[8] 徐晓东,赵忠,等. 基于BP网络的激光陀螺刻度因子的精确建模[J] . 传感技术学报, 2005, 18 (2) :3982400.XU Xiao-dong, ZHAO Zhong,et al. The accurate modeling of LaserGyro scale factor based on BP network [J]. Chinese Journal of Sensors and Actuators, 2005, 18(2): 398-400.
猜你喜欢
语数外学习·高中版中旬(2024年2期)2024-01-01 00:00:00
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
作文·初中版(2017年2期)2017-03-06 21:52:54
电子制作(2017年24期)2017-02-02 07:14:16
新闻传播(2015年9期)2015-07-18 11:04:12
发明与创新(2015年25期)2015-02-27 10:39:24
法大研究生(2015年2期)2015-02-27 10:13:55
数学教学通讯·初中版(2014年12期)2014-04-29 00:44:03
化学分析计量(2014年6期)2014-04-04 15:34:48
