
基于可变虚拟阻抗的接口逆变器改进下垂控制
2014-01-15 05:40:26郭忠南张纯江孟晓脉阚志忠
电源学报 2014年6期
郭忠南,张纯江,孟晓脉,阚志忠
(燕山大学电气工程学院,秦皇岛 066004)
引言
基于可再生能源的分布式发电(distributed generation,DG)技术得到了快速发展,但是它与传统电网之间存在很多矛盾,为了协调二者的矛盾,微电网的概念被提出[1-2]。微电网主要有并网和孤岛运行两种运行状态。所谓孤岛运行,是指微电网脱离大电网运行,此时系统的母线电压是由微网内的分布式电源来调节的。此运行状态下的每个分布式电源都需满足以下两点:(1)任何一台DG的切换不能影响微电网系统的稳定运行;(2)所有的DG都应根据自己的本地信息进行自主调节。而大家所熟知的同步发电机的频率控制正好满足以上两点,故将其控制思想[3]引入到DG的接口逆变器的控制中,即下垂控制[4-5]。由于低压微电网的线路阻抗R/X的不确定性、接口变换器的输出阻抗的不确定性以及变压器的使用都使得逆变器输出的有功功率和无功功率出现耦合,故传统的下垂控制不能实现功率的准确控制,甚至会威胁到系统的稳定性。很多学者是将功率进行变换,研究虚拟功率解耦控制[6-7],也有学者提出在下垂控制中结合虚拟阻抗控制改善DG间功率不均分问题,其中的虚拟阻抗大于微电网DG的输出阻抗和线路阻抗,从而改变DG总体等效阻抗,但此种方法中的虚拟阻抗为定值[8]。
本文将同步发电机的一次调频思想引入到DG接口逆变器的控制中,同时根据低压微电网实际传输阻抗特性,引入虚拟功率解耦控制。为进一步提高系统的稳定性和动态性能,在分析虚拟功率下垂中传输阻抗对DG输出功率影响基础上,提出基于虚拟功率的可变虚拟阻抗控制,可缓解因传输阻抗不同引起某DG长期处于极限功率下运行,影响供电质量,减小微电网失稳停电的概率。
1 DG的一次调频

由式(1)可看出,当原动机输出的机械功率小于负荷功率时,发电机的转速会下降,其调速器通过检测发电机的转速变化,来增加原动机的输出功率,使得发电机的转速上升。因为发电机输出电压的频率由其转轴的旋转速度决定,故上述调速过程即为频率的一次调节过程。综上所述同步发电机的外特性是指负荷功率变化引起输出电压的频率变化的过程,而其调速器是根据频率的变化调节原动机功率的过程,二者是闭合的。
图1为低压微电网传输线的潮流图,其中A点为DG的输出端口,B点为微网的交流母线。
同步发电机的转子运动方程为

图1 传输线的潮流图

根据图1,可得DG输出功率为考虑到DG输出电压和交流母线电压的相位差很小,即 θ1≈0,sinθ1≈θ1,cosθ1≈1,对于低压输电线路而言,线路电阻远大于线路电抗,故式(2)可以简化为

对于DG而言,其输出电压与母线电压的相位差影响其输出的无功功率,幅值差影响其输出的有功功率。将同步发电机的频率一次调节思想引入到接口逆变器的控制中,即用其输出的无功功率来调节输出电压的频率,用其输出的有功功率调节输出电压的幅值,具体控制算法为

从输入、输出角度看,DG接口逆变器的下垂控制正好类似同步发电机的外特性,而其外特性则正好类似同步发电机的调速器原理,但二者是有区别的,这主要是因为微电网惯性小,频率波动比较大,故不适合通过检测频率来调节功率。
在实际的微电网系统中,由于变压器等电力电子器件的使用使得其传输阻抗不再是纯阻性,此时若用式(4)的控制,会使系统调节速度减慢,严重者破坏系统的稳定性。由式(2)可看出DG输出的有功功率不只与其输出电压幅值有关,还与输出电压的相位有关,无功功率亦然,即二者是耦合的,故为了改善系统的稳定性,引入功率的解耦控制。引入功率变换矩阵,即

式(2)进行式(5)的变换后,可得DG输出的虚拟有功功率和无功功率[7]为

从式(6)可以看出,对于经过变换矩阵之后的DG,其输出电压与母线电压的相位差只影响其输出的虚拟有功功率,其幅值差只影响其输出的虚拟无功功率,即虚拟功率之间是解耦的,可以独立调节。此时采用的下垂控制为

即用虚拟有功功率来调节DG输出电压的频率,用虚拟无功功率来调节DG输出电压的幅值。
2 传输阻抗对DG输出功率的影响
本文针对功率传输阻抗为阻感性,且采用功率解耦下垂控制时,传输阻抗对DG输出功率的影响进行分析。 由式(6)和式(7)可得

由式(8)可以得出,以空载频率和母线电压频率差为输入,DG输出的虚拟有功功率为输出的传递函数为

当系统达到稳态,即s=0时,可得
从式(10)可看出DG输出的虚拟有功功率仅与下垂系数有关,与其他因素无关。
同理,由式(6)和式(7)可得


由式(11)解得

由式(12)可得DG输出的虚拟无功功率为

由式(13)可以看出DG输出的虚拟无功功率Qx1不仅与下垂系数n1有关,还与传输阻抗模有关,又因为

可得 Qx1=f()为单调递减函数,即传输阻抗的模越大,其输出的虚拟无功功率越小。
当功率传输阻抗为阻感性,且分布式电源的接口逆变器使用功率解耦下垂控制时,DG输出的虚拟无功功率与功率传输电抗的关系如图2所示,此时 R1=1 Ω,E*=190 V,V=188 V;DG 输出的虚拟无功功率与功率传输电阻的关系如图3所示,此时X1=0.2 Ω,E*=190 V,V=188 V。

图2 DG输出的虚拟无功功率与传输电抗的关系

图3 DG输出的虚拟无功功率与传输电阻的关系
从图2和图3中可以看出,当下垂系数一定时,线路电抗或电阻越大,DG输出的虚拟无功功率越小;线路电抗或电阻相等时,下垂系数越大,DG输出的虚拟无功功率越小。
由式(5)可知DG输出的虚拟功率与其输出的实际功率的之间的关系为

由式(15)可知,虚拟功率与实际功率之间的系数矩阵为非奇异矩阵,故只有不同DG的Px1和Qx1都得到均分并且此系数矩阵相同,P1和Q1才能都得到均分。但是由以上分析可知,当下垂系数相同时,功率传输电阻或电感越大,则DG输出的虚拟无功功率越小;当功率传输电阻和电感相同时,下垂系数越大,则DG输出的虚拟无功功率和虚拟有功功率均越小。一般情况下,下垂系数是相等的,其对DG输出功率的均衡性的影响可以忽略。但是功率传输阻抗一般不同,因此使得部分DG长时间处于低功率运行,而另外一些DG则长时间处于高极限功率下运行,使得DG易被损坏,严重者会使微电网失稳,殃及用电设备,因此需引入其它控制来解决此问题。由于引入实际阻抗会带来大量的电能损耗,故本文提出加入可变的虚拟阻抗控制,即

此时等效的功率传输阻抗为

由前面分析可知,功率传输阻抗的模越大,DG输出的虚拟无功功率越小,由式(16)可知,虚拟阻抗与虚拟无功功率成正比,即虚拟无功功率越小,则虚拟阻抗越小。由式(17)可知,可变虚拟阻抗加入之后,等效功率传输阻抗的差异减小,故DG输出功率严重不平衡的情况可以大大减小。其虚拟阻抗的具体实现为

式中:Rx=kQxcos φ,Lx=(kQxsin φ)/ω。

图4 功率环的控制框图
其中k的选取至关重要,它与DG的功率等级及实际的功率传输阻抗的模均有关。在保证等效传输阻抗上的电压损失不能过大的前提下,尽可能地减小等效传输阻抗的差距,实际选择中需要折中考虑。即

式中:IN、EN分别为逆变器输出额定电流、额定电压;Zn为逆变器线路阻抗。一般考虑等效阻抗引起电压损失小于额定电压的5%选择各台逆变器k值,以符合低压配电网的供电质量要求,Qmax为逆变器输出最大无功率,可根据逆变器的额定容量考虑Qmax的值。
3 仿真和实验
本文选用的微电网的结构如图5所示,由于是孤岛运行,故开关PCC是断开的。
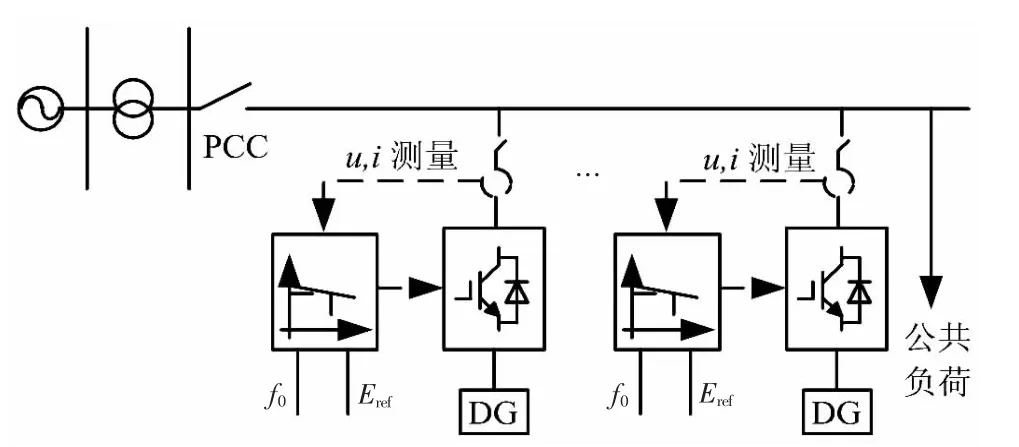
图5 微电网的结构
仿真参数如下:DG1的接口逆变器到微网母线的等效传输阻抗为 R1=0.6 Ω,L1=0.001 H,DG2 的接口逆变器到微电网母线的等效传输阻抗为R2=0.3 Ω,L2=0.000 5 H, 孤岛微电网系统内的公共负载为 Rload=24 Ω,Lload=0.03 H,逆变器额定功率3 kVA。采用一般的功率解耦下垂控制时(即未加入可变虚拟阻抗),逆变器输出的虚拟有功功率和虚拟无功功率的波形如图6所示,逆变器实际输出的有功功率和无功功率的波形如图7所示。

图6 未加入可变虚拟阻抗时输出的虚拟功率

图7 未加入可变虚拟阻抗时实际输出的功率
从图6中可以看出,两台逆变器输出的虚拟有功功率为Px1=Px2≈1 400 W,但是其输出的虚拟无功功率分别约为1 800 var和2 500 var,即传输阻抗不等不影响其输出的虚拟有功功率,但严重影响了其输出的虚拟无功功率。由图7可看出,两台逆变器实际输出的有功功率分别约为2 100 W和2 500 W,无功功率分别为850 var和1 550 var,即不同的传输阻抗使得两台逆变器的实际输出有功功率和无功功率均不相等,这与前文的结论一致。
对于同样的仿真参数,在功率解耦下垂控制中加入可变虚拟阻抗后,DG输出的虚拟有功功率和虚拟无功功率的波形如图8所示,其实际输出的有功功率和无功功率的波形如图9所示。从图8中可以看出,两台DG输出的虚拟无功功率差距约为130 var,远小于加入虚拟阻抗之前700 var的差距。从图9中也可看到两台DG实际输出的有功功率差约为80 W,远小于之前的400 W,实际的无功功率约为120 var,远小于之前的700 var。总之,通过仿真对比可以看出,加入虚拟阻抗的功率解耦控制可以明显改善因传输阻抗不同导致DG输出功率不均衡的状况。

图8 加入可变虚拟阻抗后输出的虚拟功率

图9 加入可变虚拟阻抗后实际输出的功率
实验验证是在阻性线路下进行的,DG1和DG2的传输电阻不同,分别为2 Ω和1 Ω,两台DG的额定容量相同为3 000 W,t1时刻前孤岛微电网系统中负载发生改变,从17 Ω突变为33 Ω。使用P-U和Q-f下垂控制时,两台DG输出电流如图10所示,可以看出两台DG输出电流的相位基本一致,但是幅值差很大;两台DG输出有功功率如图11所示,可以看出两台DG输出有功功率的差值很大,通过折算系数之后可以估计其差值约为400 W。

图10 加入可变虚拟电阻之前输出电流的波形

图11 加入虚拟电阻之前输出有功功率的波形
采用可变虚拟电阻的P-U和Q-f的下垂控制时,两台DG输出电流波形如图12所示,对比图10,由于按照可变虚拟阻抗下垂控制能够在输出电压偏差满足要求的情况下使得两台逆变器的输出视在功率差减小,因此反映在两台DG输出电流波形上,出现了电流幅值差上明显减小的现象;再进一步分析图13所示的两台DG输出的有功功率波形,可看出两台DG输出的有功功率差经过折算约为150 W,相比加入可变虚拟阻抗之前明显减小。综上所述,可变虚拟阻抗下垂控制方法可改善DG之间功率均分。

图12 加入可变虚拟电阻之后输出电流的波形

图13 加入可变虚拟电阻之后输出有功功率的波形
4 结语
将同步发电机的频率调节思想引入到DG接口逆变器的控制中,可以使孤岛微电网和传统电网的控制保持一致,方便将其余大电网中成熟的理论和思想应用到微电网中。考虑到实际微电网中传输阻抗的性质,将同步发电机一次调频原理进行改进,引入了功率解耦控制,改善了系统的稳定性和动态性能;考虑到传输阻抗对DG输出功率带来的影响,提出可变虚拟阻抗控制,从而可使两台DG的输出有功功率和无功功率得到较好的均分。经过仿真和实验结果的对比证实了上述控制方法的有效性。
[1]鲁宗相,王彩霞,闵勇,等.微电网研究综述[J].电力系统自动化,2007,31(19):100-106.
[2]盛鹍,孔力,齐智平,等.新型电网-微电网(microgrid)研究综述[J],继电器,2007:35(12):75-81.
[3]肖朝霞.微网控制及运行特性分析[D].天津:天津大学电气与自动化工程学院,2008.
[4]Guerrero J M,Matas J,de Vicuna L G.Wireless-control strategy for parallel operation of distributed-generation inverters[J].IEEE Transactions on Industrial Electronics,2006,53(5):1461-1470.
[5]De Brabandere K,Bolsens B,Van den Keybus J.A voltage and frequency droop control method for parallel inverters[J].IEEE Transactions on Power Electronics,2007,22(4):1107-1115.
[6]阚家荣,谢少军,吴云亚.无互联线并联逆变器的功率解耦控制策略[J].中国电机工程学报,2008,28(21):40-47.
[7]Li Yan,Li Yun wei.Decoupled power control for an inverter based low voltage microgrid in autonomous operation[C]//IEEE Power Electronics and Motion Control Conference(IPEMC).Wuhan,China,2009.
[8]Guerrero J M,Chandorkar M,Lee T L,et al.Advanced control architectures for intelligent microgrid(part I):decentralized and hierarchical control[J].IEEE Transactions on Industrial Electronics,2013,60(4):1259.
猜你喜欢
中国特种设备安全(2021年9期)2021-03-02 05:40:46
测控技术(2018年2期)2018-12-09 09:00:46
大电机技术(2017年3期)2017-06-05 09:36:02
军事文摘(2016年16期)2016-09-13 06:15:49
通信电源技术(2016年3期)2016-03-26 07:13:14
防灾减灾学报(2015年3期)2015-12-16 16:15:40
智能建筑电气技术(2015年5期)2015-12-10 05:52:30
电测与仪表(2015年21期)2015-04-09 11:52:16
电测与仪表(2015年11期)2015-04-09 11:46:14
电力工程技术(2014年1期)2014-03-20 14:19:06
