基于RT-LAB的风电并网混合仿真系统
2014-01-15 05:40毕大强常方圆李秋生于吉庆
电源学报 2014年6期
毕大强,常方圆,党 克,李秋生,于吉庆
(1.清华大学电机工程与应用电子技术系电力系统国家重点实验室,北京100084;2.东北电力大学电气工程学院,吉林 132012;3.吉林省电力勘测设计院,长春 130000)
引言
近年来随着能源、环境问题日益凸显,风能、太阳能等新型能源以分布式发电或微电网技术接入传统电力系统得到飞速发展,但由于规模大、结构复杂或研究关注点不同等问题,使得在实验室进行系统级研究变得越加困难,因此对电力系统仿真与模拟技术提出了更高的要求和挑战。目前,有关分布式发电并网或微电网问题,特别是与现存电网之间的交互影响,还主要是通过数字仿真进行研究。
数字仿真虽然可以解决研究对象规模、结构和复杂性的问题,模型简化使仿真结果与实际工况存在差异;而传统的动模实验过程中使用实际设备避免了模型简化,但实际对象规模与结构复杂性的不断提高,动模实验也很难再现实际系统的模样。仿真规模过大或者出现极端工况,物理仿真无法对实际系统进行充分深入的研究,并且分布式能源的多样性及其多变的电力系统结构也使动模实验不易实现。
随着计算机技术的快速发展,混合仿真技术成为电力系统仿真研究的一种新手段,它结合了数字仿真和动模实验的优点,正逐渐被应用于大规模新能源并网、微电网运行及控制等方面的研究。文献[1]中设计了基于RTDS和变流器控制系统的双馈风电机组信号型数/模混合仿真方案,并给出了数字仿真模型搭建和控制系统开发的技术细节,但系统中功率环节都是通过数字仿真实现的,仿真方案还停留在硬件的回路仿真概念上。文献[2]介绍了一种由光伏阵列、储能电池和RTDS实时数字仿真系统等共同组成的仿真实验平台,将实际的光伏电站特征信息接入数字仿真系统,研究光伏电站接入电网后系统稳定特性的变化。此实验系统中采用光纤变送器传输电数字信号,虽然解决了远距离传输电气量的问题,但会导致传输过程中信号延迟约为0.3 ms,继而导致转换后的模拟信号滞后 5.4°,影响实验结果的精确度。文献[3]提出一种数/模混合仿真系统的实现方案,用于分布式能源并网相关技术的研究,该方案采用PXI作为实时数字仿真平台,采用基于双PWM换流器的可控功率源作为数/模混合仿真接口,通过其与动模实验系统相连实现数/模混合仿真。文献[4]提出了一种基于NI-PXI及cRIO的可控功率源(controllable power source,CPS)硬件在环仿真平台,用于风力发电及并网相关技术的研究。文献[3-4]中,关注电网侧的动态行为,所以大电网部分为物理模型,风电机组部分为数字模型,通过采集并网点电压将电网的响应反馈至风电机组的数字模型,但是NI-PXI平台的计算速度相对要慢些,会影响混合仿真运行速度。
就目前的研究成果来看,国内外对大规模新能源接入电力系统混合仿真的研究尚处于初步阶段,尤其是采用数字物理混合仿真的方式,对新能源并网后电力系统与新能源系统之间相互影响的例子还比较少,虽然有一些成功的应用,但是在很多方面还有局限,特别是缺乏对混合仿真交互动态的深入认识。
本文基于双馈风电并网实际物理设备和RTLAB实时仿真电力系统相结合,构建了风力发电并网混合仿真系统。物理模型、数字仿真模型系统通过内外并网点界面上的电压电流相互耦合起来,成为一个相互作用的整体,以双馈风力发电机的并网控制为例,通过实验验证了所设计方案的可行性。
1 双馈风力发电系统
1.1 双馈风力发机的数学模型
关于双馈发电机的数学模型[5-6],为了便于讨论,做如下假定:①忽略定、转子电流高次谐波和定、转子磁动势高次谐波分量;②忽略电机铁心磁滞、涡流损耗及磁路饱和的影响;③转子量均折算到定子侧;④各物理量正方向按照电动机惯例选取。则在同步速旋转的坐标系下,定、转子电压方程为
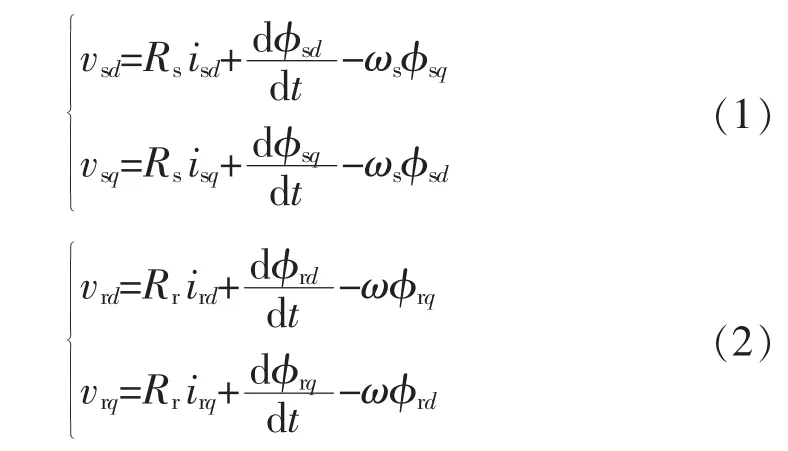
定子、转子磁链d、q轴分量方程为
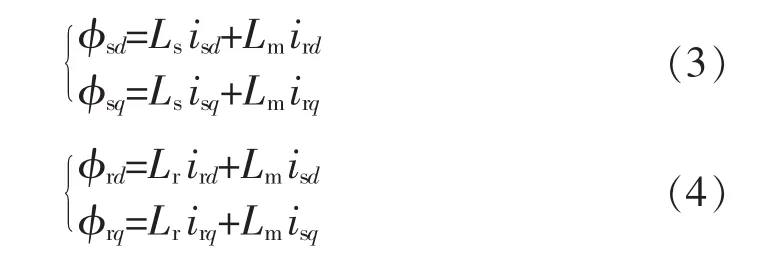
式中:Rs为定子电阻;Rr为转子电阻;Ls为定子等效两相绕组自感;Lr为转子等效两相绕组自感;Lm为d-q坐标系定转子同轴等效绕组间互感;vsd、vsq为定子电压的 d、q 轴分量;vrd、vrq为转子电压的 d、q 轴分量;φsd、φsq为定子磁链的 d、q 轴分量;φrd、φrq为转子磁链的 d、q 轴分量;isd、isq为定子电流的 d、q 轴分量;ird、irq为转子电流的d、q轴分量;ω为转差角速度。
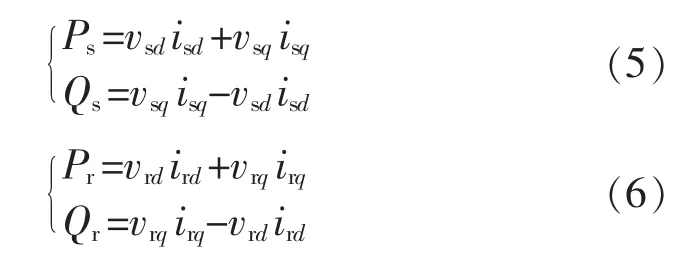
定子侧、转子侧的有功功率、无功功率为
发电机的电磁转矩为

式中,p为发电机的极对数。
1.2 双馈风力发电机控制系统
本文采用双PWM变流器对转子回路进行励磁,网侧变流器与电网直接相连,其主要控制目标是保持直流电压恒定且具有良好的动态响应能力;转子侧变流器与转子相连,其功能为确保发电机输出解耦的有功和无功功率。网侧和转子侧变流器分别采用电网电压定向和定子电压定向的矢量控制。
1.2.1 网侧变流器控制
网侧变流器在d-q坐标下的方程为

有功功率、无功功率分别为
将同步旋转的坐标d轴定向于vd,则vq为0。有功和无功功率可分别转化为对id和iq的控制。忽略开关动作引起的谐波和其他损耗,式(9)可转化为

由此可见,可用id单独控制vdc,经过对直流电压误差的PI调节可以得到其参考值;同理,无功功率由决定,当设为0时,可以满足功率因数为1的要求。整体矢量控制策略如图1所示。
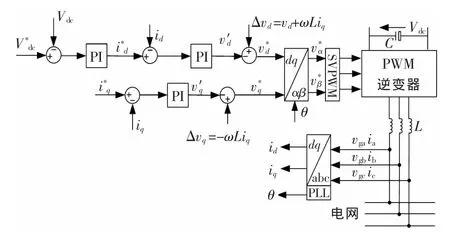
图1 网侧变流器矢量控制原理
1.2.2 转子侧变流器控制
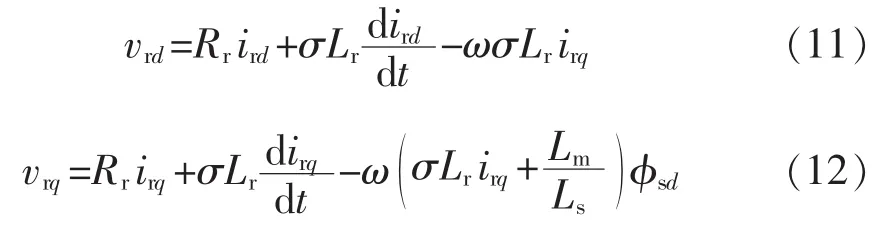
转子侧采用定子电压定向矢量控制方案[7]。假设定子电压为常数,定子电阻的影响可以忽略不计,由式(1)~式(7)可得
电磁转矩为

式中:σ=1-L2m/LsLr;ω=ωs-ωr。
由式(11)~式(12)可知
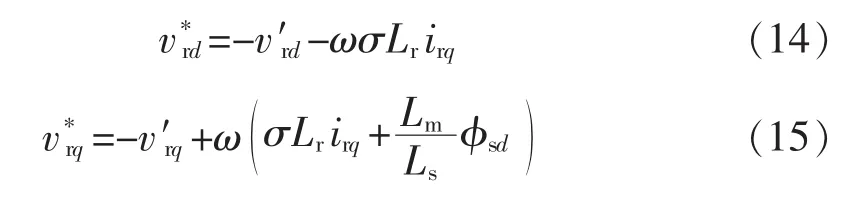
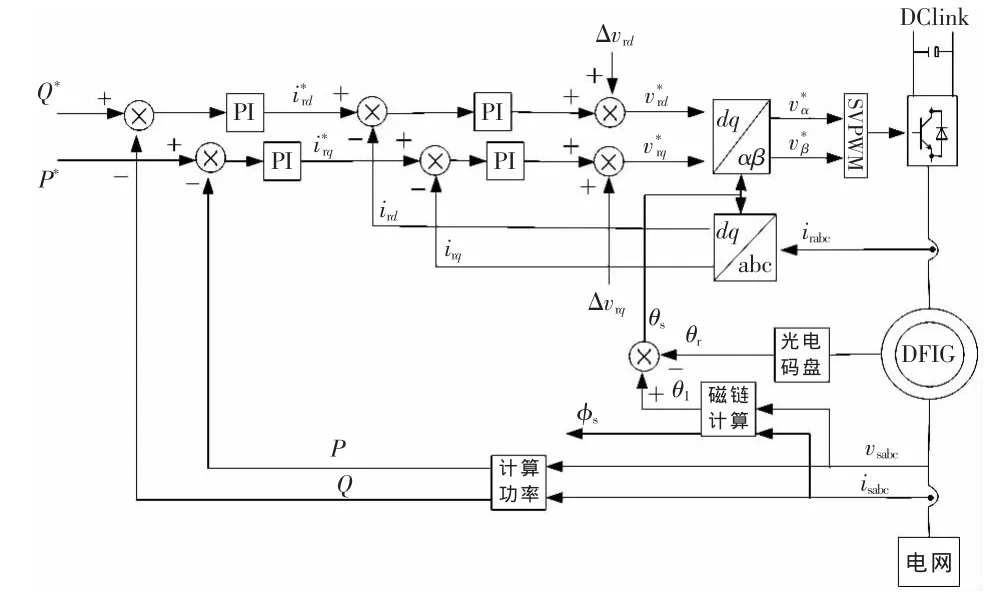
图2 转子侧变流器矢量控制原理
2 RT-LAB仿真系统简介
RT-LAB是加拿大Opal-RT公司开发的一套基于模型的仿真系统平台软件包,可将MATLAB/Simulink所搭建的系统,通过上位机和多处理器目标机,在实时仿真平台上运行,并可通过Windows窗口对目标机的整个运行过程进行实时监控,提供在线修改参数的功能,从而方便地实现复杂仿真、快速控制原型仿真,以及硬件在回路仿真的工作。RT-LAB仿真平台主要包括上位机、目标机及参与仿真的硬件[8],结构如图3所示。
总的来说RT-LAB实时系统仿真软件具有如下一些优点[9]:(1)在仿真模型各个子系统之间可以获得实时通信和同步控制;(2)支持半物理仿真,如硬件在回路、快速控制原型;(3)支持与其他非实时仿真平台的协同仿真,这些非实时平台上的程序通过RT-LAB仿真界面接口程序与仿真模型系统之间交互非实时数据;(4)能自动划分模型并产生分布式仿真代码,RT-LAB工具自动照顾编码细节的优点不但加速开发过程,而且使得仿真模型具有灵活的伸缩能力;(5)允许现场真实信号连进仿真模型,从而实现仿真系统与外部设备进行通信,进而构建半物理、分布式仿真系统。

图3 RT-LAB实时仿真系统结构
3 风电并网混合仿真系统的设计与研究
3.1 实验系统的设计
本文设计的风力发电并网混合仿真平台中,风力发电机组、并网变流器、并网点模拟器以及交流负载等为实际的物理设备,风电所并入的电网部分采用RT-LAB实时仿真平台数字建模,通过数字电力系统控制并网点模拟器模拟接入电网。数字仿真部分实时地将RT-LAB仿真输出的并网点电压信号转换为模拟量输出,并由并网点电压模拟器放大,作为实际风力发电并网系统的并网电压;同时,将风力发电系统输出的并网电流信号通过模拟量输入传送回RT-LAB仿真系统中,作为数字系统中风电并网点的注入电流,从而实现实际风电系统和数字电力系统并网点界面上的电压、电流的控制和反馈。因此,实际风电系统嵌入到电力仿真系统中,数字仿真系统和实际风电设备形成一个完整的混合仿真系统,结构示意如图4所示。
通过观测实验系统中并网点电压、电流等参数的变化可以研究风力发电系统接入电网后整个电力系统的动态特性,以及两者之间的相互影响和相互作用。
3.2 物理实验设备参数
拖动电机额定功率4 kW,额定电压380 V,同步转速1 000 r/min,极对数6。双馈风电机组额定功率3 kW,额定电压380 V,频率50 Hz,同步转速为1 000 r/min,转子额定电流3 A,定子额定电流3.8 A,极对数6。交流负载额定功率为3 kW。并网点模拟器采用Eglar公司生产的线性受控电源(smart wave switching amplifier),其响应速度为 10 μs。
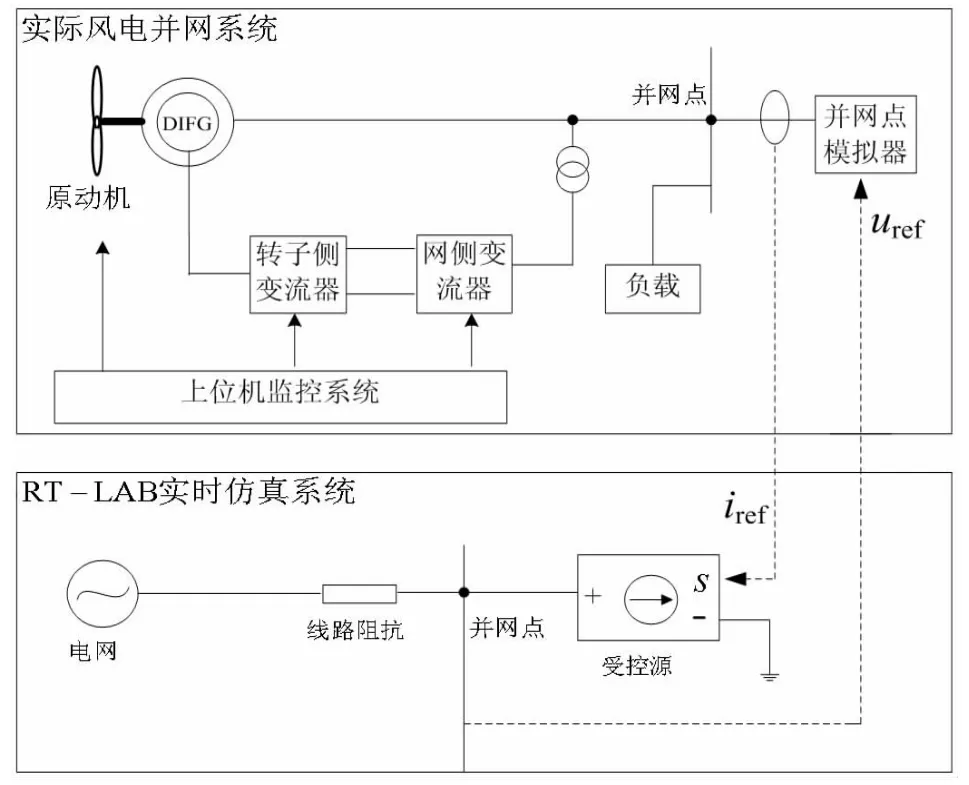
图4 混合仿真系统结构示意
3.3 RT-LAB仿真平台模型
如图5所示,数字电力系统模型部分基于RTLAB实时仿真平台搭建,电力系统运行电压设为390 V,线路阻抗设为2Ω。
为了方便调节实际风电系统馈入电网的电压频率,实时仿真系统中采用幅值和频率可调的可控电压源表示电网。实时仿真模型中,受控源作为并网点风力发电注入电流,等效为风电并网系统的作用,受实际风力发电并网电流控制。对于实际的风电系统来说,它的并网点电压受RT-LAB实时平台上虚拟电网的控制,所以可模拟电网运行情况变化对实际风力发电并网特性的影响;同时,对于实时仿真系统来说,它的运行特性受到风力发电系统外特性的影响,所以能够模拟风电并网对电力系统运行情况的影响。
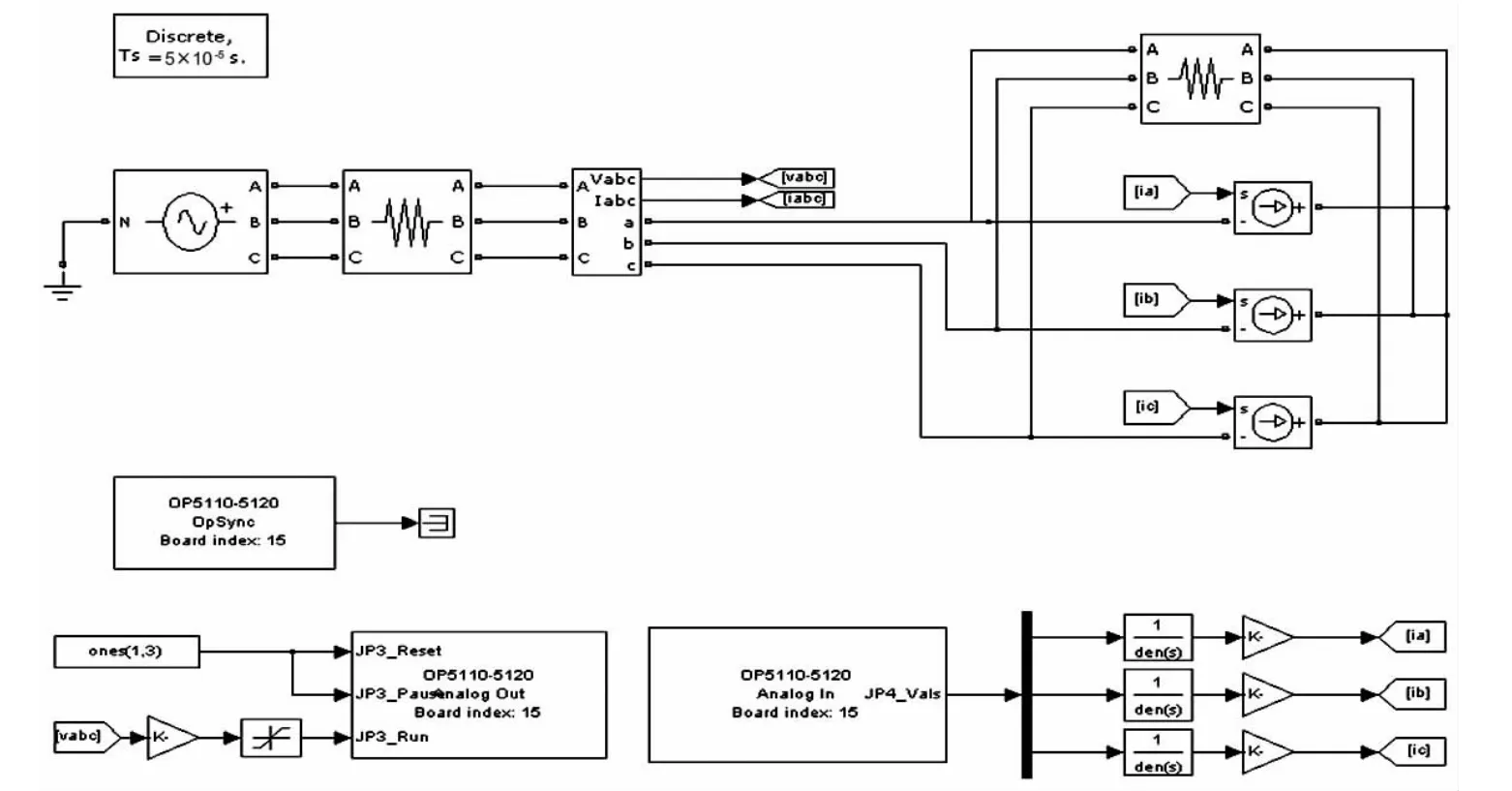
图5 实时仿真接入电力系统模型
4 实验结果分析
整个风力发电并网混合仿真实验系统场景如图6所示。通过风力发电上位机界面控制,给定原动机转速为800 r/min,风电机组定子并网功率为1 kW,可调式交流负载额定功率为3 kW。系统运行至10.8 s时,转速提高到1 100 r/min,功率升高为2 kW,20.1 s时功率升高到3 kW,使系统达到稳定运行。图7为整体实验波形结果。
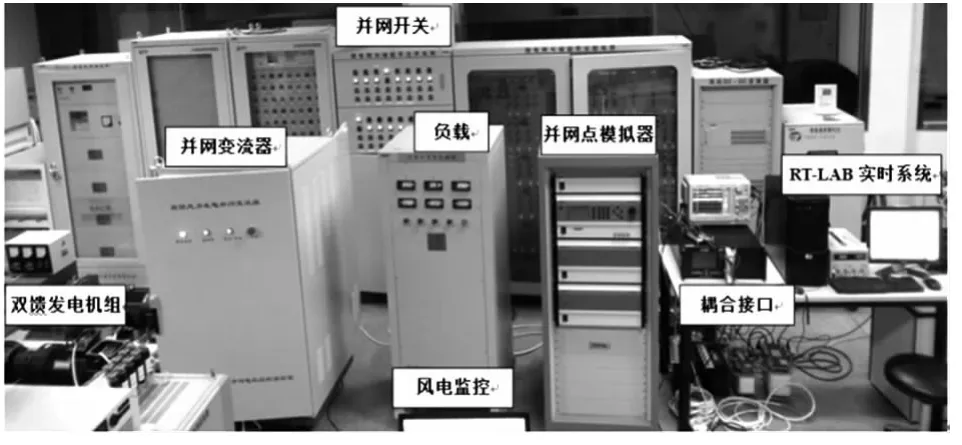
图6 风力发电并网混合仿真实验系统场景
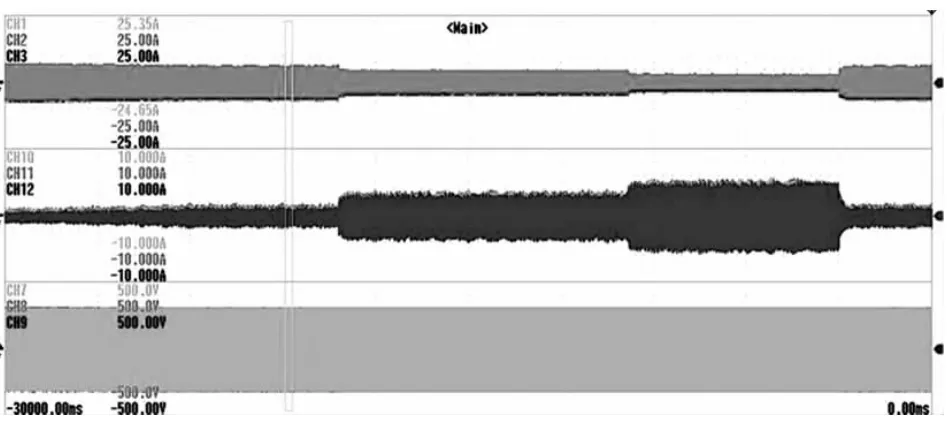
图7 整体实验参数波形
其中,CH1、CH2、CH3 为 RT-LAB 实时平台所模拟风电接入并网点的电网输出电流,CH10、CH11、CH12为双馈风力发电机组的并网电流,CH7、CH8、CH9为实际风电系统并网点三相电压。图8和图9分别为功率1 kW、转速800 r/min和功率3 kW、转速1 100 r/min时各变量幅值及波形变化放大。
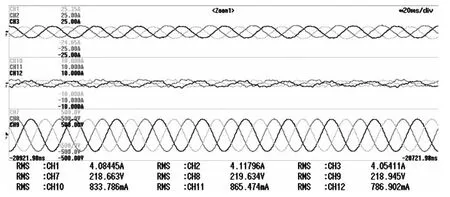
图8 风电功率1 kW时各状态变量
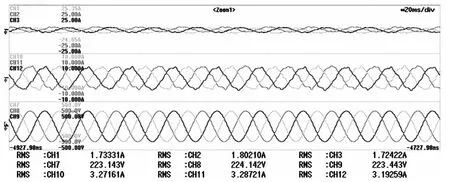
图9 风电功率3 kW时各状态变量
实验结果显示,风电机组并网达到稳定运行时,当定子并网功率为1 kW,此时风力发电机组并网电流CH10、CH11、CH12的幅值分别为 833.8 mA、865.5 mA、786.9 mA,并网点电压 CH7、CH8、CH9 幅值分别为 218.6 V、219.6 V、218.9 V,并网点的模拟电网输出电流实时仿真系统中并网点电流CH1、CH2、CH3 幅值分别为 4.08 A、4.12 A、4.05 A;当定子并网功率增大至3 kW,此时风力发电机组并网点电流CH10、CH11、CH12 的 幅 值 分 别 为 3.27 A、3.29 A、3.19 A, 并网点电压 CH7、CH8、CH9 幅值分别为223.1 V、224.1 V、223.4 V, 并网点的模拟电网 CH1、CH2、CH3 幅值分别为 1.73 A、1.80 A、1.72 A。
从波形和数据分析可以看出,随着实际风电系统并网功率增加,并网电流增加,就地负载消耗了风电功率,使得接入电网输出的电流减小,反应到内部电网仿真模型中,线路阻抗压降减小,导致并网点电压升高。整体实验过程中,波形平稳,运行良好。实验波形体现风力发电系统与电网之间的相互影响关系,验证了所设计的风电并网混合仿真实验系统的有效性。
5 结语
本文中所设计的风电并网混合仿真系统的特点在于将RT-LAB仿真平台与实际风力发电并网设备构成了完整的系统,其应用前景广阔。首先,本实验系统具有电网接入背景,可以在实际电网环境下研究新能源的运行特性;其次,本系统可以研究新能源接入后电力系统的动态特性。该实验系统的完成为进一步开展新能源接入电网后新能源系统和电网之间相互作用的研究打下了基础。
[1]刘其辉,李万杰.双馈风力发电及变流控制的数/模混合仿真方案分析与设计[J].电力系统自动化,2011,35(1):83-84.
[2]孟超,吴涛,刘平,等.光伏和储能并网物理数字混合仿真实验系统方案[J].电力系统自动化,2013,37(6):90-95.
[3]付超,王丹,王毅,等.基于NI-PXI的分布式发电数模混合仿真系统[J].电力电子技术,2012,46(2):57-59.
[4]王丹,石新春,孙玉巍,等.风力发电的可控功率源硬件在环仿真[J].新能源发电控制技术,2013,35(2):32-34.
[5]Slootweg J G,Polinder H,Kling W L.Dynamic modeling of a wind turbine with doubly fed induction generator[C]//IEEE Power Eng Soc Summer Meeting.Vancouver,BC,Canada,2001.
[6]Tapia A G,Ostolaza J X,Saenz J R.Modeling and control of a wind turbine driven doubly fed induction generator[J].IEEE Transactions on Energy Conversion,2003,8(2):194-204.
[7]王涛,邹毅军,年晓红,等.并网双馈风力发电实时仿真控制方案研究[J].系统仿真学报,2009,21(14):4306-4310.
[8]周林,贾芳成,郭珂,等.采用RT-LAB的光伏发电仿真系统试验分析[J].高电压技术,2010,36(11):2815-2816.
[9]Christian Dufour,Simon Abourida,Jean Belanger.Hard ware-in-the-loop simulation of power drives with RTLAB[J].IEEE PEDS,2005:1646-1650.
猜你喜欢
今日农业(2022年16期)2022-09-22
防爆电机(2022年1期)2022-02-16
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
印刷工业(2020年4期)2020-10-27
测控技术(2018年2期)2018-12-09
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
现代金融(2016年7期)2016-12-01