
面向重建的结构光中心快速提取方法*
2014-01-10 01:13:22揭平良吕文阁谢庆华张湘伟广东工业大学机电工程学院广东广州510006
机电工程技术 2014年5期
揭平良,吕文阁,谢庆华,张湘伟(广东工业大学机电工程学院,广东广州 510006)
面向重建的结构光中心快速提取方法*
揭平良,吕文阁,谢庆华,张湘伟
(广东工业大学机电工程学院,广东广州 510006)
在逆向工程的非接触光学测量系统中,准确、快速提取光条中心是保证获取实物表面形状数据精度和算法实时性的关键因素。根据激光强度符合高斯分布和光条边界的连续性特点,对传统的光条中心提取方法进行改进。考虑光条在图像中的形状和分布特征,通过从图像的不同位置和方向扫描得到光条中心,并比较了不同扫描方法所用的时间。利用本文方法重建了动车轮毂的三维轮廓。实验结果表明,本文方法比传统方法有明显提高,具有较强的实用性。
逆向工程;光条中心提取;中心法;三维重构
0 引言
根据实体轮廓生成几何模型的方法称为逆向工程[1]。逆向工程与现代设计密切相关,已成为制造业产品开发中的重要手段。实物表面形状数据的获取是逆向工程的基础。通常获取实体表面形状数据的方法分为两大类,接触式和非接触式测量方法[2]。三坐标测量仪(coordinate measure ma⁃chine,CMM)是逆向工程中使用最为广泛的传统形状测量设备,但它存需要一定的工作环境、速度慢、效率低且价格昂贵等弱点[3]。随着计算机及光电技术的发展,光学式非接触测量方法逐渐占据重要地位。近年来基于结构光的非接触三维测量技术得到了快速的发展,光切法(light-section method)[3]是近10年发展起来的一种非接触测量方法。由于三维测量技术的主要任务是光条中心的准确、快速的提取,因此精确提取光条中心是提高测量精度的关键,光条中心的提取时间决定算法的实时性能。通常使用的光条中心提取方法有极值法、阈值法、重心法和高斯拟合法等[4-5],但这些方法在图像数据较大时,很难达到实时性测量的要求。因此有必要研究一种快速提取光条中心的方法。
由于激光的高强度特点,一般条件下环境噪音对图像中光条强度服从高斯分布这一特征影响很小[6]。因此光条的中心线理论上是图像中光条的中心线,通常光条边界点能量较弱难以提取,本文提出取距离峰值较近的像素为光条的虚拟边界,并采用光条中心提取方法中的中心法提取光条中心。在处理的图像数据较大时传统的中心提取方法的算法时间复杂度较高。难以达到实时检测的效果。本文基于光条边界的连续性和光条在图像中的位置、形状等分布特征。结合光条边界相邻像素点之间的偏置关系,判断图像中每列(行)开始和终止扫描位置,根据不同的情况,使用24种方法实现光条中心的快速提取。并比较不同的两种方法重构动车轮毂模型。
1 改进中心法
在实际操作中,提出了六组光条提取方法。为了说明各组中心提取方法,绘制图1所示的光条中心每一列扫描示意图。图中共有八种从图像的不同方向和不同位置扫描每一列光条的上、下边界点的方式。在整幅图像的光条提取中,根据光条位置、方向和光条质量特征通过结合八种方法,具体有六种实现方法。

图1 图像扫描示意图
(1)图像的每一列按照图1中的I方法从上往下扫描找到光条的上、下边界点并计算出光条中心点。同理还可以从下往上扫描找到光条中心点。
(2)图像的每一列按照V方法从上往下扫描找到光条上边界点,接着从下往上扫描找到光条下边界点,通过光条上、下边界点计算出光条的中心点,同理可以改变V方法的扫描先后顺序找出每一列的光条中心点。
(3)在图像中先设定一个扫描开始上边界,扫描开始上(下)边界一般取大于光条的最大轮廓矩阵,从扫描开始上边界的点位置按照II向下扫描找到第一列的光条中心,从第二列开始以后每一列扫描之前判断上一列的光条上、下边界点是否找到,如果找到,此时按照在前一列位置向上偏执若干个像素点按照III方法扫描找到光条上、下边界点并计算出光条中心点,如果没有找到光条上、下边界点或扫描开始上边界点小于图像上边界点则按照II方法扫描找到该列光条的上、下边界点并计算光条中心。以此方法找到每列的光条中心。同理可以从反方向扫描找到光条中心。
(4)从扫描开始上边界点位置按照II方法向下扫描找到第一列上、下光条边界并求出光条中心,从第二列开始以后每一列扫描之前判断上一列的光条上、下边界点是否找到,如果找到,此时判断该扫描开始上边界点与上一列的光条上边界点的大小,如果扫描开始上边界点大于上一列的光条上边界点,则取扫描开始上边界点等于上一列的光条上边界点位置减去偏置的若干个像素按照IV方法找到光条上、下边界点并计算出光条中心点。如果没有找到上一列的光条上、下边界点,此时的扫描开始上边界等于图像上边界点并按照I方法计算出光条中心。同理可以从反方向扫描找到光条中心。
(5)从扫描开始上边界点开始按照VI从上向下扫描找到第一列的光条上边界点,从第二列开始以后每一列扫描之前判断上列光条上边界点是否找到,如果找到,此时的扫描开始上边界点等于上一列的光条上边界点的位置加上偏置的若干个像素按照VII方法从上往下扫描找到光条上边界点。如果没有找到光条上边界点,此时的扫描开始上边界点等于图像上边界点并按照VI方法从上往下找到光条上边界点。同理反方向按照扫描开始下边界点,按照VI和VII方法从下往上找到光条下边界点。通过找到的光条上下边界点计算出每一列光条中心点。同理可以先找到光条下边界再找光条上边界计算光条中心。
(6)从扫描开始上边界点开始向下扫描如II方法找到第一列光条的中心点,从第二列开始以后每一列扫描之前判断上列的光条中心点是否找到,如果找到,此时判断该扫描开始上边界点与上一列的光条上边界点的大小,如果扫描开始上边界点大于上一列的光条上边界点,则取扫描开始上边界点等于上一列的光条上边界点位置减去偏置的若干个像素点并按照VIII扫描,如果没有找到上一列的光条中心点,此时按照II扫描,通过找到光条上、下边界点来计算出光条的中心点。同理可以先找到光条下边界再找光条上边界计算光条中心。
2 实验方案
为了测试六组方法在各种复杂光条中心提取中的速度,构造了如图2、3所示的两幅图像,图像中的光条有凹凸、间断、内孔等复杂特征,以模拟各种光条特征。图2和图3的大小分别为1024×768和768×1024像素。

图2 测试图像1

图3 测试图像2
上述6组方法中的每组在图2中包含从上往下和从下往上两种扫描方法,在图3中包含从左向右和从右向左两种扫描方法。因此总共有24种不同的方法。利用Visual C++和OPENCV编程实现上述24方法,并利用图2和图3图像验证方法的精度和速度,为了降低偶然因素影响,将每个方法运行1 000次后取平均值作为最后的实验结果。见表1。

表1 方法在图2、3中运行的平均时间ms
实验结果表明:光条中心的轮廓和光条实际中心的轮廓有很好的一致性。图4、5分别为在图2使用方法3和在图3使用方法2提取的光条中心,由表1实验数据可得,相同的扫描方法在不同的图像中的运算速度不同,且图2由于图像存储格式对算法速度有利,速度比图1明显有优势。方法1在同一幅图像中从下往上、从上往下、从左往右和从右往左扫描所对应的算法时间度不同,特点是从图像中靠近光条方向处开始扫描的速度大于反方向处开始扫描的速度。方法2和方法3在同一幅图像上无论从哪个方向扫描所得的算法速度大致是一样的。方法3、4、5、6的算法速度大致相同并且与方法1、2相比具有明显的优势。方法3、4、6相比方法5运算速度要快一些。这在图像数据较大时速度优势将更明显。这与最初的使用不同的扫描方法寻找光条中心算法的速度不同和不同图像使用不同的光条提取方法可以提高算法速度的想法得到很好的验证,同时提出了六种可选择的中心提取方法,为具有不同特征的光条中心提取提供了多种可选择的快速方法。同时提取的精度可以达到像素级,可以满足大部分图像的光条中心提。
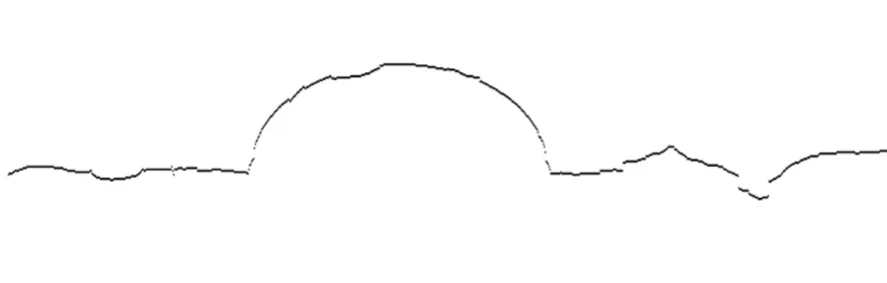
图4 图2的光条中心
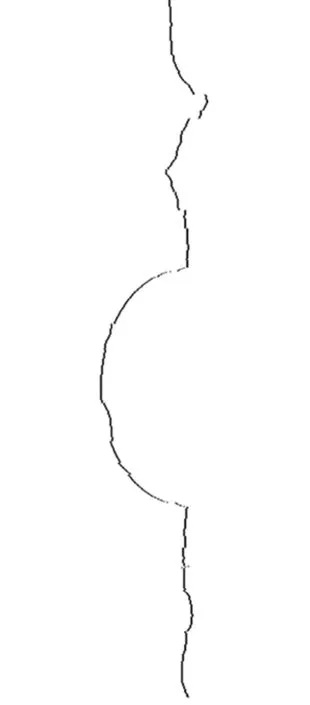
图5 图3的光条中心
3 应用实例
将光条提取方法运用于动车轮毂模型的重构项目中,图6为需要重构的动车1/4轮毂模型。该轮毂模型的半径为19 cm、高为4 cm。搭建实验平台如图7所示,将轮毂模型放置在运动控制平台上面,采用线激光,运动控制平台以1 cm/s移动轮毂,并触发AVT相机采集轮毂移动位置处的光条图像。拍摄图像格式为640×480灰度图像。根据得到的光条图像,使用本文中光条中心提取方法。通过相机标定、光条提取、三维重建得到图8所示的轮廓三维图。实验结果表明重建的三维轮廓精度为1 mm。在该项目中采用方法1和4,方法4:单张图像处理时间为0.256 ms。所有图像处理的总时间为48.596 ms,方法1:单张图像处理时间为1.375 ms,所有图像处理的总时间为261.246 ms,结果表明选择不同的扫描方法在图像数据较大时改进的光条提取算法有明显的优势。
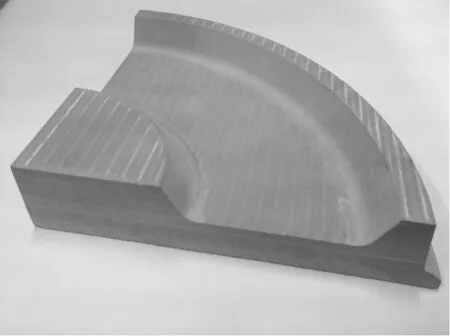
图6 动车1/4轮毂模型
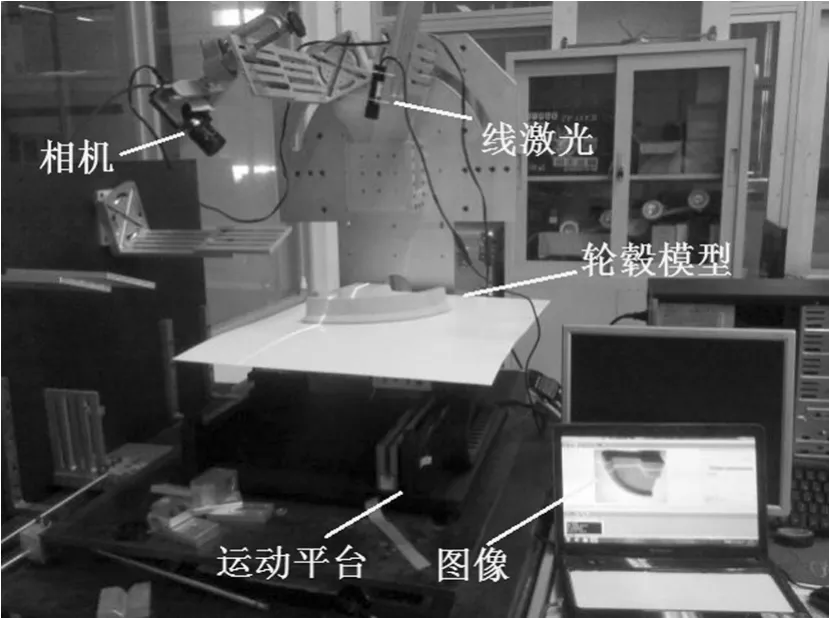
图7 实验平台

图8 动车1/4轮毂轮廓重构图
4 结论
根据激光光强符合高斯分布,取距离峰值较近的灰度值为光条虚拟边界,并利用光条中心提取中的中心法提取。根据图像相邻边界的连续性,利用相邻像素行(或列)的偏置扫描,通过从不同的方向扫描每行(或列)获取光条中心。结合实际光条的特征使用24种方法具体实现,并使用Visual C++和OPENCV编程测试不同方法的算法速度和提取光条的质量。实验结果表明,不同的扫描方法在同一图像和不同的图像上算法时间复杂度表现出较大的差异。在动车轮毂模型的三维重建项目中,使用该方法提取光条中心,实验结果表明,利用方法4总时间比方法1少212.650 ms,运算速度达到了实时检测的要求。并达到系统所需精度。本文中提出的快速光条提取方法在实时性要求比较高的场合下,具有较强的使用性。
[1]成思源,余国鑫,张湘伟.逆向系统曲面模型重建方法研究[J].计算机集成制造系统,2008,14(10):1934-1939.
[2]杨雪荣,张湘伟,成思源,等.基于可变形模型的光条纹中心提取方法研究[J].中国机械工程,2009,20(3):334-336.
[3]杨雪荣,张湘伟,成思源,等.三坐标测量机与线结构光传感器集成系统的测量模型[J].中国机械工程,2009,20(9):1020-1023.
[4]雷海军,李德华,王建永,等.一种结构光条纹中心快速检测方法[J].华中理工大学学报:自然科学版,2003,31(1):74-76.
[5]刘枝梅,邓文怡,娄小平.结构光测量系统中光条中心的提取算法[J].北京机械工业学院学报,2009,24(1):42-45.
[6]解则晓,辛悦向,金明光,等.光条亮度对线结构光测量精度的影响[J].光学技术,2008,34(12):52-54.
Reconstruction Based on Real-Time Extracting Light Strip Center Method
JIE Ping-liang,LV Wen-ge,XIE Qing-hua,ZHANG Xiang-wei
(College of Mechanical&Electronic Engineering,Guangdong University of Technology,Guangzhou 510006,China)
In the non-contact optical measurement system in reverse engineering,physical surface data accurate and rapid extraction laser stripe is a key factor to guarantee system precision and real-time of algorithms.The paper based on the laser intensity distribution conforms to the Gaussian distribution and the continuity border of laser stripe,improved the traditional laser stripe center extraction method, combined with the shape and distribution of the light in the image, Through scanning laser stripe center from a different position and orientation of the image and compare the times of different scanning method.Apply this method to rebuilding three-dimensional contour of the train hubcaps.Experimental results show that the method is significantly improved than the traditional method.This method has a strong practical.
reverse engineering;extracting light strip center;center method;three-dimensional reconstruction
TP751
A
1009-9492(2014)05-0061-04
10.3969/j.issn.1009-9492.2014.05.015
揭平良,男,1987年生,江西抚州人,硕士研究生。研究领域:机器视觉算法及应用。
(编辑:向 飞)
*国家自然科学基金(编号:51276043);广东省重大科技专项(编号:2009A080204006)
2014-03-24
猜你喜欢
现代制造技术与装备(2022年9期)2022-11-02 05:40:16
测绘学报(2021年11期)2021-12-09 03:13:12
东华大学学报(自然科学版)(2021年4期)2021-09-15 02:54:12
激光技术(2021年5期)2021-08-17 03:36:02
激光与红外(2021年6期)2021-07-23 09:27:32
电脑报(2020年12期)2020-06-30 19:56:42
电脑报(2019年4期)2019-09-10 07:22:44
少儿美术·书法版(2016年1期)2016-02-06 00:59:39
大众摄影(2015年9期)2015-09-06 17:05:41
机械工程师(2014年10期)2014-07-08 02:16:28
