船载交流伺服系统检测平台可视化设计与实现
2014-01-01 03:10:02聂洪平周启荣
无线电通信技术 2014年6期
聂洪平,周启荣,李 兵
(中国卫星海上测控部,江苏江阴214400)
0 引言
随着海上连续作业的时间越来越长,船载卫通站长期处于开机状态,甲板设备面临越来越大的考验,作为动力执行装置的驱动、电机等装置更是超负荷工作,因此建立一套可靠的机下检测平台对检测设备性能有很重要的作用。目前,岗位已经具备船载交流伺服系统检测平台,但该平台无法直观地表现天线的运动,无法对检测数据作出准确的判断。因此,建立天线可视化模型并仿真出天线的运动状态,对发挥船载交流伺服系统检测平台的功能至关重要。
1 船载交流伺服系统检测平台
现有船载卫通站交流伺服系统构成如图1所示,利用备用设备搭建机下交流伺服系统,在SERVOSTAR控制软件界面输入驱动信号,比如正弦驱动信号下电机转速、加速度和扭矩的变化等,通过串口通信方式传输给驱动器和电机之间的环路来控制电机状态,并能在SERVOSTAR软件界面显示设备在不同运行状态下的各种状态参数,实现对设备进行机下检测的目的。
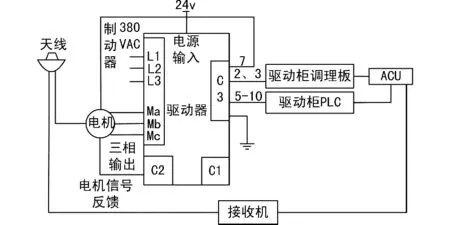
图1 船载交流伺服系统构成关系图
伺服之星SERVOSTAR是以色列开发的一款数字伺服系统控制软件。该软件中包含多种型号电机的数据库,在机床加工、设计生产以及电子器件装配方面都有广泛应用。伺服之星软件可以为研究驱动器技术提供极大便利,可以对数字电流环、速度环参数进行在线调整,对电机低速与高速控制和正弦PWM控制等控制算法进行优化。
图2是利用SERVOSTAR软件搭建的交流伺服系统检测平台设计图。在此基础上,建立天线的三维仿真模型,利用SERVOSTAR接收的设备参数信息(诸如电机转速和电机角度位置等)驱动天线仿真终端,达到实时立体表现交流伺服系统运行状态的目的。天线动态模拟仿真及数据交互是本课题实现可视化需要完成的两大工作。
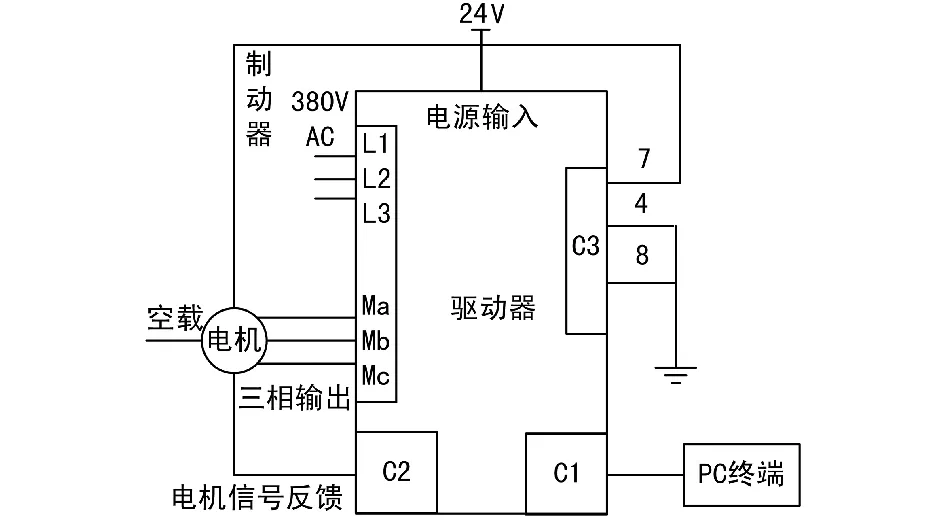
图2 交流伺服系统检测平台设计图
2 关键技术
2.1 三维建模
三维建模可以使用户直观地了解所研究对象,实现在实际对象上难以完成的工作。为了将检测平台数据直观反映在天线上,利用3DMAX建模软件实现了天线外观结构模型的建立。对实现三维建模而言,3DMAX可靠性强且应用范围广,适合于三维动画渲染和制作。3DMAX建模软件由Autodesk公司开发,立足于PC系统,功能强大,操作简单且和其他相关软件配合流畅、效果逼真。3DMAX软件的建模过程比较复杂,而建模的方式也是多种多样,包括几何特征建模、行为特征建模以及交互特征建模。几何特征建模侧重于直接读取CAD模型信息,并在CAD系统中完成装配关系的建立。行为特征建模主要是面向任务建立虚拟物体行为模型,使其真实地反映物体各结构的行为特性。
以行为特征建模方式为主,辅以其他方法一并实现。在整个建模过程中,层次细节技术和纹理映射技术结合使用,降低场景实时渲染的复杂度。纹理映射(Texture Mapping)技术能提高三维物体的逼真度,避免对场景的每个细节都用多边形来表示,进而可以大大减少环境模型的多边形数目。纹理图像被定义成二维的UV坐标平面,这个平面被映射到一个几何模型的x、y、z坐标内。当三维模型旋转时,映射后的纹理也被旋转和改变大小并在屏幕上绘制出来。
2.2 三维仿真
建立三维模型后,还需要完成模型对平台检测数据的实时响应。让三维模型动起来并能实时响应变量数据,需要用到三维仿真技术。利用三维仿真平台Unity3D实现天线模型的仿真。Unity3D是由Unity Technologies公司开发的一个可以轻松创建诸如三维视频游戏、建筑可视化、实时三维动画等类型互动内容的多平台的综合型游戏开发工具,是一个全面整合的专业游戏引擎。Unity支持所有主要的模型文件格式,并能和大部分相关应用程序协同工作,它还对Direct和OpenGL拥有高度优化的图形渲染管道。该软件拥有自己的API函数库,通过建立后台程序文件可以实现游戏开发方面的多种功能,比如动态交互、串口通信等。
2.3 基于系统数据驱动天线模型
天伺馈系统的驱动单元由永磁同步交流电动机和功率放大器(俗称驱动器)组成。驱动器处理来自ACU(天线控制单元)的数据,转换成电流数据传递到电动机使得电动机驱动天线。而本系统驱动对象是天线仿真模型,因此,保持计算机数据与实物天线转动状况同源与同步是实现天线驱动的关键所在。天线的转动是实际表现为天线的角度变化,模拟的对象应为速度环或位置环输出参数,即电机转速或者天线角度。将这些数据从串口字节中提取出来,参考天线转轴比后传递给仿真平台程序中的相应变量,便能实现同步同源驱动天线模型,如图3所示。

图3 天线动态图
2.4 基于串口的数据交互
采集系统数据使用的伺服之星SERVOSTAR为电动机厂商研发的专业软件,开放性不是很好,直接利用软件内部数据比较困难,考虑采取串口通信或数据文件过渡的方式完成数据交互。经反复调试论证,串口通信方式实现起来更为方便,因此采用串口通信的方式来完成数据的交互。驱动器上的检测串口为9针RS-232串口,RS-232也是PC机与通信工业中应用最广泛的一种串行接口。平台可视化终端定义好串口属性,通过程序预留接口接收从驱动器串口输出的系统数据,根据传输源码各字节含义将其转化为天线模型所需的实际参数值。
3 检测平台可视化实现
3.1 模型的导入与导出
通过3DMax软件建立天线三维模型后,将三维模型导出并保存为以.fdx为后缀名的文件,并把此模型文件和纹理图片文件一并粘贴到的Unity3D新建projects的Assets文件夹目录下,打开Unity3D软件检查文件在层次栏中的读入情况,然后将模型文件整体拖入Project栏,至此三维模型导入Unity3D结束。当所有调试工作完成,Unity3D导出.exe执行文件和数据文件夹作为最终的客户终端。
3.2 纹理贴图和组织划分
先期完成设备纹理图片的制作。将拍摄的装备照片按模型尺寸比例通过Photoshop软件进行处理。特殊实景材质,通过数码相机微距拍摄取得原始素材。在Photoshop中通过图形大小调整、亮度、对比度和锐化等效果处理,保存为材质图形文件。根据模型中各个立面材质需要的不同,导入相应的材质,调整其填涂坐标。船载天线虚拟仿真效果及其随动层次图如图4所示。
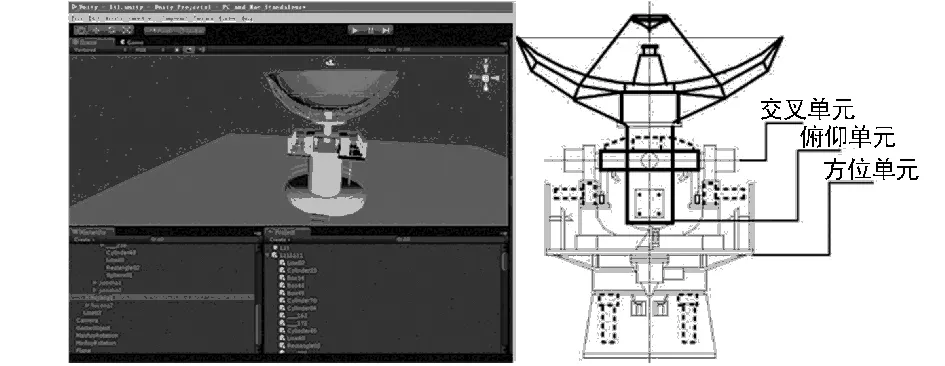
图4 天线虚拟仿真效果及其随动层次图
三维模型生成后,给各面贴上对应的纹理,对模型进行消隐、光照等处理,以达到真实的三维效果。根据天线各个部件的机械随动关系,明确天线结构随动层次图和划分天线转动关节,结合各分支结构组织,建立天线结构指向体系。
3.3 模拟动态天线,实现数据交互
在Unity3D中大部分功能通过编程实现,功能函数一般定义在Unity3D自身的API函数库中。将模型定义为Transform类,由Transform类函数Rotate函数实现天线三轴旋转,三轴单独建立程序文件,拖入代表三轴的模型属性栏里。实现数据交互由SerialPort类定义串口名称、波特率、起始位、停止位、奇偶校验等参数,Read函数读取串口数据写进Byte[]位数组,然后将天线需要的转速参数赋值给Rotate函数中的转速变量,将调试好的程序文件拖入控制对象的属性栏中,便达到通过程序控制GameObject的目的。以下程序为Unity3D读取串口数据程序。
对以上串口程序进行调试,首先在PC电脑上搭建输入输出2个串口,调试完毕后模拟驱动器反馈回的串口源码数据,用串口调试助手发送给其中一个串口,天线仿真终端通过另一个端口接收此数据,读取数据中代表电机转速、电机位置及电机转矩的字节,通过程序调试确保电机转速和天线角速度的比例值符合天线实际比例值。
调试界面如图5所示。
串口通信调试成功后,利用备用驱动器和电机及直流电源和380 V电源搭建检测平台。在SERVOSTAR命令窗口输入转速值,电机随之转动;同时,SERVOSTAR的参数显示界面上显示电机的最大和最小转速,天线模型的一轴也随之以一定速度转动。增加输入命令转速,观察电机转速和SERVOSTAR的反馈参数,电机转动和反馈参数均正常,天线模型转动明显加快,平台测试结果一切正常。
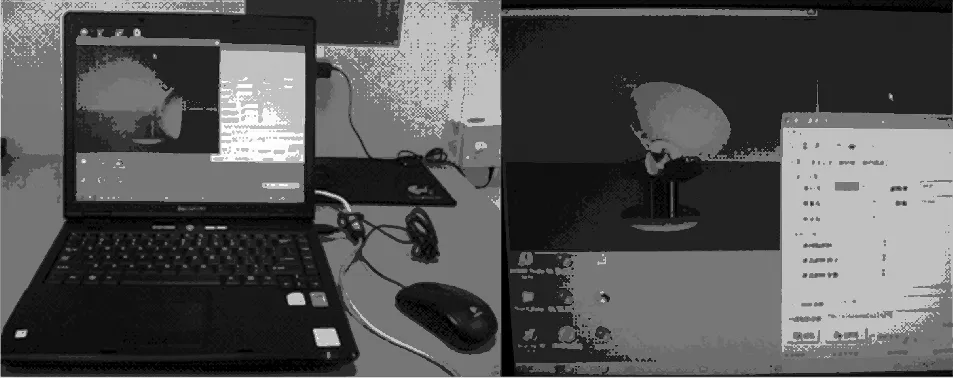
图5 串口程序调试界面
4 结束语
主要对船载交流伺服系统检测平台进行可视化设计,并且研究出具体实现的方法,对发挥检测平台的功能具有很强的实践意义和现实价值。实现检测平台可视化,不仅使检测人员更加便于观察参数状态,而且模拟出天线的实时状态,使得检测平台具有实时性的同时更贴近现实。未来将继续在平台可视化方面进行拓展,争取在更大程度在天线模型上体现电机性能。
[1] 舒金辉,蔡葵,周群彪.三维纹理映射技术研究[J].四川大学学报,2010,47(1):77 -80.
[2] ROSSINGNAC J,BORREL P.Multi-resolution 3D Appromation for Rendering Complex Sense[M].Berlin:Spinger-Ver-Lag,2003:453 -456.
[3] 吕川,徐宏强,马麟,等.“混合控制”驱动虚拟人实现维修仿真[J].北京航空航天大学学报,2005,3(15):544-547.
[4] 景韶宇,沈治英,苟秉承,等.人机设计中的虚拟人仿真技术研究[J].计算机工程与应用,2005(6):196 -198.
[5] 杨云斌,何良莉,王峰军.基于数字样机的虚拟维修技术[J].计算机应用,2010,30(12):171 -173.
[6] 谢叻.基于虚拟现实技术的力觉交互设备的研究与构建[D].上海:上海交通大学,2008:30-36.
[7] 冯良波.虚拟现实中三维场景构建的优化研究[D].长沙:中南大学,2010:45 -49.
[8] java118.3DMAX 百度百科[EB/OL].[2012-10-16].http://baike.baidu.com/view/179088.htm.
[9] 董沛然,贺信.舰船装备多级链路设计与实现[J].无线电工程,2011,41(8):6 -8,24.
[10] ROSSINGNAC J,BORREL P.Multi-resolution 3D Appromation for Rendering Complex Sense[M].Berlin:Spinger-Ver-Lag,2003:453-456.
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22 00:32:50
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
云南化工(2021年8期)2021-12-21 06:37:54
装备制造技术(2020年11期)2021-01-26 00:39:12
海洋信息技术与应用(2020年1期)2020-06-11 12:43:56
传媒评论(2019年4期)2019-07-13 05:49:14
测控技术(2018年12期)2018-11-25 09:37:44
通信电源技术(2016年5期)2016-03-22 01:10:02
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
地矿测绘(2015年3期)2015-12-22 06:27:26