中德亚毫米波望远镜的伺服系统设计
2014-01-01 03:09:48郑万章
无线电通信技术 2014年4期
郑万章
(中国电子科技集团公司第五十四研究所,河北石家庄050081)
0 引言
从20世纪70年代开始,毫米波/亚毫米波天文学得到了长足的发展,而且对天体物理研究的多个领域做出了巨大的贡献。虽然这个重要的波段已经引起越来越多的中国天文学家的重视,但由于各方面原因,中国目前还仍然缺乏可提供给天文学家进行常规观测的亚毫米波望远镜。为此,中国科学院国家天文台联合国内多家单位,与德国科隆大学合作,引进了3m口径KOMSA亚毫米波望远镜,台址设在中国西藏当雄县海拨4 300 m的羊八井天文观测站。该望远镜是中国第一架可用于正常观测的亚毫米波望远镜,也是目前北半球台址海拨最高的亚毫米波望远镜[1]。该望远镜的伺服系统设计改造工作,特别是其高性能指标的实现,为该望远镜实现天文观测打下坚实的基础,对中国进一步吸引国际合作进行大型天文望远镜的建设有着非常重要的意义。
1 天线控制系统设计
1.1 系统设备选择
中德亚毫米波望远镜天线的指向精度要求很高,在天线的不同工作状态单个轴向指向精度要小于10 arcsec,整体的指向精度要小于20 arcsec;在整个控制过程中,望远镜要根据国家天文台用户的指令进行相应的运动控制,实时采集天线各轴状态并发送给用户上位机。上下位机之间采用网络授时以保证时间的一致性,因此在整个过程中要求控制系统有快速的指令响应和较低的网络时延;根据馈源信号抗干扰要求,要求整体控制系统必须通过电磁兼容EMC测试;此外,还要完成整个天线控制系统的状态监控和安全保护功能。
经过大量的调研和仿真分析,采用了德国Rexroth公司的一体化伺服解决方案:主控单元为CML65型 MLC运动逻辑控制器,驱动器为 Indradrive HCS系列驱动器,电机为MSK050C系列交流伺服电机;方位轴和俯仰轴角度测量采用德国Heidenhain公司ECN225系列高精度编码器[2]。
系统设备选用的主要优点:
①MLC拥有1 GHz主频,数据处理能力强大,实时性能好,其运算速度非常高,最小程序周期可为1 ms,而且TCP响应时间经过测试达到了小于4 ms指标;
②硬件配置程序indraworks的功能比较全面,配置用法简单;软件编程应用程序Indralogic的编程语言众多,不但提够了ST语言和简单易懂的梯形图语言,而且还在indralogic lib中提供了多种实用又便利的应用功能模块;
③运动逻辑控制器与驱动器之间采用SERCOS III总线方式连接,其数据通信时间周期为2 ms,这样保证了运动逻辑控制器提取驱动器和电机参数的实时性;
④德国Bosch集团下的Rexroth伺服产品保持了高可靠性的风格,在其他多个已完成项目中得到了充分的证实。
1.2 系统原理和组成
整个控制系统工作方式分为2种模式:正常观测时的上位机用户通过以太网络远程控制的模式和在安装和维护过程中的用户用手控盒进行本地调试的模式。系统还加入了类似飞机黑匣子功能的数据记录设备用来实时记录天线运行时的状态,包括电压、电流、速度、跟随误差和报错代码等信息。安全保护系统由机械开关、接近开关和按钮急停开关组成,能够最大限度保证设备正常安全运行。天线控制系统的组成框图如图1所示。
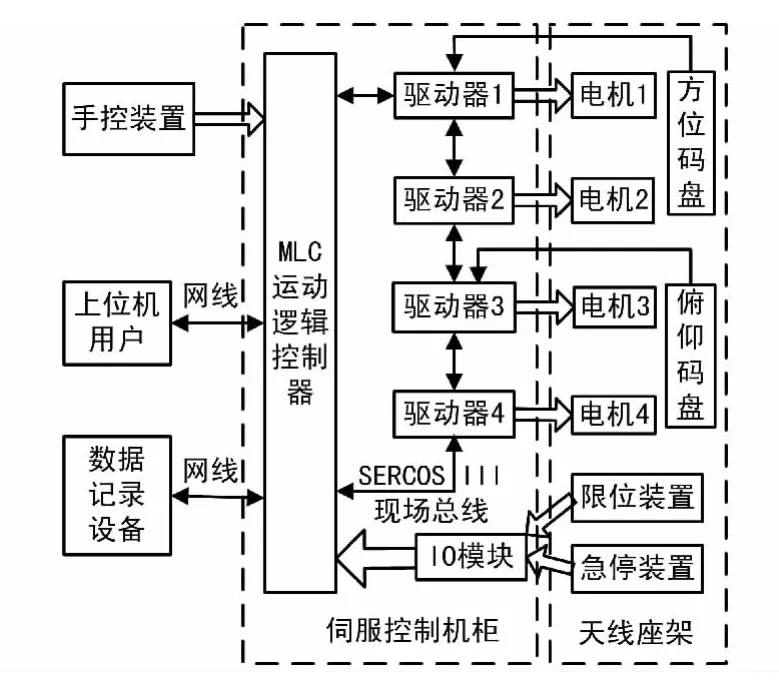
图1 天线控制系统组成框图
MLC控制器是整个驱动控制部分的核心,基于标准的PLC协议,是集成了CPU运算、IO接口和通讯接口的硬件平台[3]。MLC通过以太网络与用户上位机和数据记录设备进行通信,按照用户的指令进行相应的运动控制,并且实时上报天线各轴状态[4]。
4个驱动器通过SERCOSIII总线和MLC控制器连接,是整个控制系统的功率放大部分。每个驱动器在天线控制系统内部具有唯一的标识,并分别连接一个电机,将MLC发出的指令信号转化为驱动信号送给电机。电机接收驱动信号通过带动行星减速机和大齿轮,进而控制天线转动[5,6]。
轴角采集装置采用了德国Heidenhain公司的25位绝对式码盘ECN225,精度可达20 arcsec,安装在各个转动轴的末端,并与驱动器通过Endat2.1接口连接,将各个轴的位置信息实时反馈给控制系统[7,8]。
安全保护系统分为三级保护,第一级为软件限位保护,第二级为电限位保护,最后一级为机械限位保护。急停开关和限位开关的设置可在天线出现异常情况下停止天线的运行,并上报错误信号,保证了系统运行的安全性和系统故障的易排查性。
1.3 软件设计
程序的开发环境为Indraworks内嵌的Indralogic软件。中德亚毫米波望远镜天线的软件大量采用了梯形图语言,这种语言的优点是非常直观,配合Indralogic内置的多种功能块可实现对于继电器的控制、设备加电、IO数据处理及电机状态读取等基本功能;复杂的程序控制采用了流程化和结构化的ST语言编程,以实现通讯、网络授时和轨迹跟踪等复杂功能。天线的软件组成框图如图2所示。

图2 软件系统组成框图
天线控制系统软件由基本控制、手动控制、NTP授时和远控控制4个子功能组成,子功能之间通过相应语句进行相互调用。系统运行时,必要的是进行网络授时,保证MLC控制器和上位机的时间同步。本控模式下,通过采集手控盒的按钮指令,控制驱动器给电机使能,调用功能块控制天线以设定的速度转动;远控模式下,根据ACU发来的控制指令,首先进行命令指令的解码处理,再调用使能控制模块,实现速度控制、位置控制和轨道跟踪等高级功能。
天线控制系统软件的各个模块可以单独导出或者导入,可以作为模块化的程序块使用,软件的结构清晰,可移植性强。
2 关键技术实现
2.1 双机消隙技术
方位轴和俯仰轴采用对力矩差值进行PID控制的双电机消隙技术,提高了望远镜运动的精度和转向时的平稳性。双机消隙系统框图如图3所示,其中虚线标示线的部分表示数据通过SERCOS III总线方式进行传输。

图3 双机消隙系统框图
主电机驱动器的位置环路是采用全功能形式,其位置反馈值为高精度的外接位置码盘的输出值,直接反馈到位置环路前端,与位置指令值做差值输入位置环路。位置指令值由MLC运动逻辑控制器通过运算完成[9,10]。
从电机位置环路的KV值等于零,就意味着取消了从电机的位置环路,这样使得从电机驱动器只剩下速度控制环路和力矩控制环路。主电机驱动器和从电机驱动器分别与虚拟轴进行位置同步和速度同步,使得从电机速度指令与主电机的速度指令一致,这样为系统性能的提高提供了保障。主电机和从电机的力矩反馈值有2个作用:其一是进入力矩环路进行闭环;其二就是提取给运动逻辑控制器MLC进行PID模块控制。
2.2 轨迹跟踪技术
轨迹跟踪程序为伺服软件的主要关键部分,被设计成由轨迹记录子程序和轨迹执行程序一起完成。轨迹记录子程序完成对监控上位机发送的跟踪轨迹的记录和计算,每个轨迹点的记录值包括轨迹运行的MJD时间和2个轴的运行位置,计算值为每个轨迹点相对于前一个轨迹点的时间差值和2个轴的位置差值[11,12]。轨迹执行程序的流程图如图4所示。

图4 轨迹执行程序的流程图
当轨迹运行开始时,各轴根据伺服系统最大运行速度计算能切入的轨迹点istart,然后将当前时间和两个轴位置作为轨迹曲线起点istart-1,并重新计算轨迹点istart与istart-1轨迹点的相对时间和相对位置;接下来进入轨迹跟踪循环,首先判断运行条件,如果轨迹点堆栈寄存器里面的点数大于等于3个,则运用PROFILE模块开始构造7次方曲线,构造轨迹曲线需要轨迹段的相对时间和2个轴相对位置,计算轨迹段的起始速度和结束速度,并规定构造曲线的运行模式。运用轨迹切入程序在虚拟时间主轴达到轨迹点的时间时,切入轨迹段运行曲线。
3 结束语
中德亚毫米波望远镜的伺服系统设计满足了高精度、快响应和易维护等高性能技术指标;基于Rexroth交流伺服的天线控制系统贯彻了一体化和简易化设计思想;整体设备严格按照电磁屏蔽标准设计满足了射电天文设备电磁环境要求;双电机消隙技术和轨迹跟踪技术的研发和应用解决了射电天文望远镜的技术难题。中德亚毫米波望远镜的伺服设计和安装调试已经顺利完成,并得到了用户的认可,为该望远镜的正常观测打下了坚实的基础。
[1] 王俊杰,宁长春.中德亚毫米波望远镜项目前景展望[J].西藏:西藏大学学报,2010,25(1):58 -63.
[2] 力乐士公司.Rexroth indraDrive Firmwave for Drive Controllers[M].北京:力乐士公司,2010.
[3] 齐蓉,肖维荣.可编程控制器技术[M].北京:电子工业出版社,2009.
[4] 韩文泽.DSP控制器在天线伺服系统中的应用[J].计算机与网络,2005,31(9):47 -49.
[5] 李华德.交流调速控制系统[M].北京:电子工业出版社,2003.
[6] 王瑞明.交流伺服驱动系统新型控制策略研究[D].浙江:浙江大学,2005.
[7] 王宝仁.网络化运动控制系统多轴协同关键技术研究[D].山东:山东大学,2008.
[8] 金钱,胡祜德,李向春.伺服系统设计指导[M].北京:北京理工大学出版社,2000.
[9] 杨文清.双电机消隙伺服系统的研究与应用[D].西安:西安电子科技大学,2010:25 -32.
[10]程登元.一种双电机消隙伺服系统[J].雷达科学与技术,2009(5):392 -396.
[11]张建飞.船载天地VHF伺服程序引导原理及改进设计[J].无线电工程,2009,39(4):47 -49.
[12]警斌.超大型天线馈源舱柔索支撑结构动力学分析与跟踪控制[J].控制理论与应用,2007,24(6):938-942.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
中学生数理化·八年级物理人教版(2022年11期)2022-02-14 06:37:40
电脑爱好者(2020年6期)2020-05-26 09:27:33
中学生数理化·八年级物理人教版(2018年11期)2019-01-31 02:40:08
测控技术(2018年12期)2018-11-25 09:37:44
小哥白尼(趣味科学)(2018年6期)2018-09-14 06:10:58
摄影之友(影像视觉)(2017年12期)2017-02-08 02:10:02
光学精密工程(2016年5期)2016-11-07 09:06:04
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
弹箭与制导学报(2015年1期)2015-03-11 15:32:18