
多站遥测数据实时对接方法研究
2014-01-01 03:09:24刘桂生何嘉靖李天宝
无线电工程 2014年11期
刘桂生,高 山,贵 宇,何嘉靖,李天宝
(太原卫星发射中心,山西太原030027)
0 引言
在飞行器飞行试验中,通常在首区、航区和落区布设多台遥测站,用于全弹道接力测量,达到遥测数据的不间断接收[1]。多站遥测数据实时送中心计算机进行处理并显示,作为实时指挥决策的依据,飞行结束后对遥测数据进行事后处理,处理结果作为飞行器设计评定和故障分析的依据[2,3]。目前对于多站遥测数据的处理模式,事后处理与实时处理互不相同,事后处理先对多站遥测数据进行剪辑和对接,形成一套完整的全程测量数据,然后进行遥测参数处理[3,4];实时处理同时对各站遥测数据分别进行参数处理,然后按照特定策略对多站处理结果进行择优。随着参试遥测站增多,这种实时处理模式突显出软硬件资源需求急剧增加和择优过程复杂等弊端,改进方法是解密前进行多站遥测数据实时对接,将多站遥测数据并行处理模式改变为只对一个遥测流进行处理,而实现方法关键是解决好遥测帧对齐和检择等问题,本文对此进行了研究。
1 实时遥测数据处理模式现状分析
目前实时遥测数据处理信息流程如图1所示。
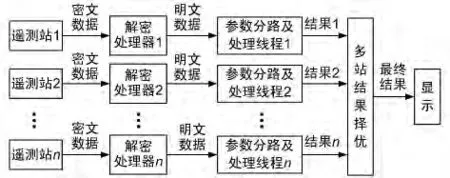
图1 目前实时遥测数据处理信息流程
各遥测站将接收的密文遥测数据发送到指控中心,先经过解密预处理设备和解密器完成数据解密,输出明文遥测数据,中心计算机系统对明文遥测数据进行参数分路(挑路)并计算处理,这些过程都是并行针对各遥测站数据独立进行,分别得到各遥测站数据的处理结果,最后对各站数据处理结果按照事先制定的策略进行择优,形成最终结果供显示和指挥决策。
这种处理模式存在以下弊端:
①资源耗费大。由于一个遥测站通常接收多个遥测流数据,每个遥测流数据对应一台解密处理设备,为了保证可靠性,另按一定比例热备份解密处理设备,目前还要适应多发并行试验,对解密处理设备硬件需求数量达到参试遥测站数量2倍或3倍以上。参数分路及处理按所有遥测站的累计遥测流数分别进行,计算机资源耗费大,操作人员的软件配置维护工作量大[5]。
②择优策略调整频繁。每次试验需根据各遥测站的布站位置、跟踪弧段和飞行特性事先制定参数择优策略,花费不少工作量,且由于影响跟踪测量的因素较多,制定的择优策略并不能总是十分有效。
③精细化处理程度低。目前是基于各个遥测数据流单独处理的结果级综合择优,未在原码级对各个遥测数据流进行择优互补。比如某遥测站某参数只接收到1帧或2帧数据,不符合参数解算条件,该1帧或2帧数据即成了无效数据,不能在处理中发挥作用,若能在原码级对各个遥测数据流进行逐帧择优互补,则该1帧或2帧数据就能作为有效数据参与择优互补,提高参数解算成功的概率[6]。
2 实时遥测数据处理模式改进设想
针对当前实时遥测数据处理模式存在的弊端,提出解密前进行多站遥测数据对接的改进设想,改进后实时遥测数据处理信息流程如图2所示。各遥测站将接收的密文遥测数据发送到指控中心,先经过多站遥测数据实时逐帧对接,将多个遥测站接收的多个遥测数据流(弹上同源)拼接形成一个完整的全程测量数据流,再经过解密预处理设备和解密器完成数据解密,输出明文遥测数据,中心计算机系统对明文遥测数据进行参数分路(挑路)并计算处理,结果供显示和指挥决策。
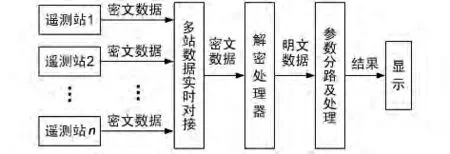
图2 改进后实时遥测数据处理信息流程
改进后,需要增加实时数据对接服务器,解密处理设备数量只需根据弹上遥测流数量配置,与地面参试遥测站数量无关,可以极大地缩减解密处理设备需求数量。对接后只对一个遥测数据流进行参数分路及处理,计算机资源耗费小,操作人员对软件配置维护工作量小,省去了每次飞行试验事先制定参数择优策略。各个遥测站接收的每一帧数据都能参与对接过程,尤其在传输点数很少的遥测参数解算中作用明显。
3 多站遥测数据实时对接方法
在实际飞行试验中,由于目标姿态变化、级间分离、尾焰和设备故障等多种原因,地面遥测设备获取的遥测数据经常出现不同程度的乱散段[7],网络传输过程中还可能发生数据丢失现象[8,9],单站测量数据往往不能满足处理的要求,因此需要对多站数据进行对接,获取完整的测量数据。数据对接是事后数据预处理工作的重要内容,文献[3,4,10]等介绍了事后处理数据剪辑和对接的方法,但鲜见实时遥测数据对接方法的研究文献。
3.1 数据实时对接与事后对接的区别
遥测数据实时对接可以借鉴事后对接的方法,但由于处理时机和处理要求等特点不同,实时对接与事后对接方法必然存在区别。
①实时对接是一种实时、不可逆的一次性行为,必须对当前接收的有限帧数据做出及时判断、选择,对接方法不能包含后验信息,实时性、可靠性要求高。事后对接在相对宽松的期限内对各站记录的遥测数据文件进行处理,通过对遥测数据文件搜索、检查,可以获取丰富的数据质量后验信息,然后基于这些丰富的后验信息进行数据对接,对接过程允许多次重复。
②事后对接可以采用基于遥测地面时间的数据对接方法和基于遥测全帧计数的数据对接方法,基于遥测地面时间的数据对接方法和对接过程较为复杂,而基于遥测全帧计数的多站数据对接方法处理简单[11]。解密前数据实时对接只能采用基于遥测地面时间的数据对接方法,因为全帧计数作为遥测参数被加密。
3.2 遥测数据的帧格式
遥测站发送到指控中心的遥测数据是标准子帧数据流,子帧数据格式如图3所示[10]。帧数据格式中的时间字是由地面遥测站添加在数据帧前面的时统时间,记录了当前帧到来时时码接收器的解调时间。副帧计数字也是地面遥测站添加在数据帧前面的副帧同步字,当副帧锁定时以0作为全帧起点,每帧加1,直至全帧结束,当副帧未锁定时保持0不变。时间字、副帧计数字和同步码均不加密,遥测数据码根据需要加密。一个全帧由若干个子帧组成(无副帧时一个子帧即相当于一个全帧)。
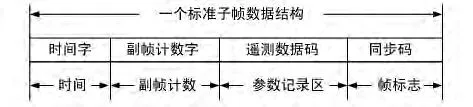
图3 标准子帧数据结构
3.3 遥测帧对齐
实时对接前,必须首先实现遥测帧对齐,即从接收的多站遥测数据中识别出同一帧遥测数据。因为全帧计数作为遥测参数被加密,只能依据遥测站添加在数据帧前面的时统时间进行遥测帧对齐。由于各遥测站接收遥测信号的电波传输延时和时统延时不同,所以各遥测站添加在同一帧数据前面的时间经常存在差异,必须经过适当的延时修正才能完成遥测帧对齐。因为实时只能做粗略的延时修正,经过延时修正可以缩小这种差异,但很难完全消除这种差异,只要这种差异明显小于紧邻2帧信号的采样时间间隔即可。
实时对接中,可以利用理论弹道进行电波延时修正,电波延时计算方法如下[12]:

式中,C为光速;Ri为ti时刻目标与遥测站的距离;Δti为ti时刻电波传输延时。电波延时修正误差主要来源于实际飞行弹道与理论弹道的误差,假设这2种弹道误差极限为300 km,则带来1 ms电波延时修正误差。
时统延时包括B码信号传输延时和B码终端解调延时,有些遥测站能达到几百μs,但发射前经过时统延时精确测定后[13],通过B码终端自身具备的延时修正功能,可将时统延时降至几十μs。地面遥测站数据配时精度为0.1 ms,则配时误差<0.1 ms。
综上,按极限情况估算,经过延时修正后,各遥测站同一帧数据的时间差异<1.2 ms,且差异主要由电波延时引起。
理论上有按子帧对齐和按全帧对齐2种途径,但由于子帧周期很小(通常为百μs级),经过延时修正后各遥测站同一帧数据的时间误差在极限情况下很可能大于子帧周期,导致无法准确识别同一子帧数据,因此按子帧对齐不可靠。全帧周期通常在10 ms以上,以全帧中第1子帧的时间作为全帧时间,则全帧时间极限误差与全帧周期相差一个量级,可以准确识别同一全帧数据,因此实时对接应按全帧对齐遥测数据,只要满足延时修正后时间差<1.2 ms或1/5全帧周期即可认定为同一全帧数据。
飞行试验中遥测站A和遥测站B(两站相距390 km)连续若干帧数据(子帧周期0.312 5 ms,全帧周期10 ms,副帧长N)电波延时修正后的时间如表1所示。其中,遥测站A距目标25 060 m,电波延时修正为0.1 ms;遥测站B距目标388 340 m,电波延时修正为1.3 ms。
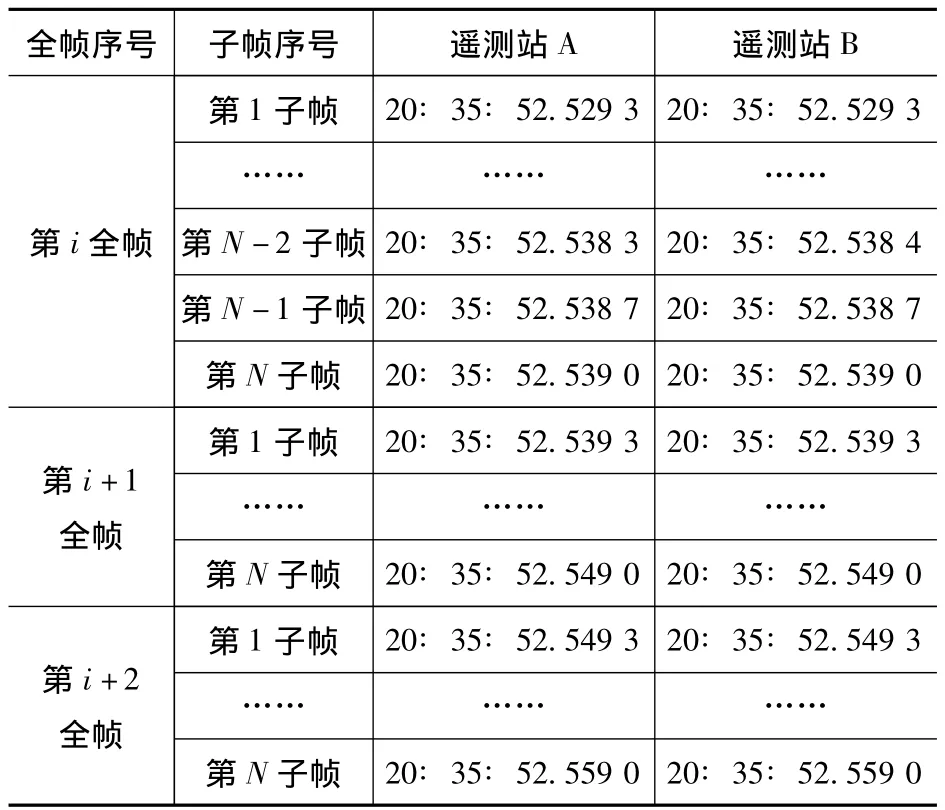
表1 遥测站A和站B连续若干帧数据延时修正后的时间
按照延时修正后时间差<1.2 ms即认定为同一帧数据的判决标准,表1中A站第i+1全帧时间与B站第i和i+2全帧时间的差值均为10 ms,与B站第i+1全帧时间的差值为0 ms,可以准确、唯一地对齐A站和B站的第i+1全帧,但A站第i全帧的第N-1子帧时间与B站第i全帧的第N-2、第N-1和第N子帧时间的差值均<1.2 ms,不能准确、唯一地对齐子帧。
3.4 全帧整理
为了实现按全帧对齐遥测数据,必须将子帧数据流整理成全帧数据流,可以利用地面遥测站添加在子帧数据前面的副帧计数字进行副帧同步,完成全帧整理。这种副帧同步方式实质就是ID副帧同步方式。
3.5 全帧检择对接
多站遥测数据全帧对齐后,即可进行逐帧对接。对接时,必须对整理出的全帧进行检查,主要是检查时码和帧同步码,比较帧内数据,以便从多站接收的同一全帧中选出最可信的一帧。
①时码检查。检查该全帧中每一子帧时间码是否正常,主要判断时间是否为非法值,与当前系统时间是否一致,连续2帧的时间间隔是否符合子帧周期,时间是否连续递增。
②帧同步码检查。检查全帧内每个子帧的帧同步码是否符合要求,对帧同步码的错误位数进行统计。错误位数越少,表明数据质量越好,优先选择帧同步码完全正确的全帧。
③帧内数据比对。全帧数据对齐后,若有3个以上遥测站都接收到某个全帧,可以对帧内数据相互比较,即比较帧内数据的每一个字节原码是否一致,按照三判二原则,如果存在2个全帧帧内数据完全一致,则从中选择一个;如果不存在,则按照帧同步码错误位数最少、之前3个全帧内帧同步码错误位数最少等条件选择最可信的一帧。
将检择的全帧数据按顺序组织成一个数据质量相对较好的遥测流,提供解密和遥测数据实时处理。
4 结束语
针对实时遥测数据特点,研究了可行的对接方法,解决了多站遥测数据实时对接关键问题,有利于改进实时遥测数据处理模式,进而节省软硬件资源,简化参数择优策略,提高处理精细化程度。在实际应用时,由于各遥测站数据至中心的网络传输延时不一致[14],中心需根据实时性要求合理选择接收数据缓冲时间,也可以在维持现有实时处理模式基础上,将实时对接形成的遥测流作为所有遥测站的综合备份流。
[1] 孙 喜,谢会琴.遥测多台车记录参数信息融合方法及实现[J].导弹技术,2009(2):68-70.
[2] 黄学德.导弹测控系统[M].北京:国防工业出版社,2000.
[3] 陈以恩.遥测数据处理[M].北京:国防工业出版社,2002.
[4] GJB 2238A-2004.遥测数据处理[S].
[5] 张彩月,陈 良.基于数据库的遥测数据传输系统的设计[J].无线电通信技术,2013,39(3):46 -49.
[6] 高 义,刘承禹.基于软件架构设计的多源信息融合系统[J].无线电通信技术,2012,38(5):60 -63.
[7] 郭引兰,刘桂生,韩文虎.遥测数据散乱原因分析方法研究[J].导弹试验技术,2003(2):34-36.
[8] 种 景.试验IP网组播丢包问题研究[J].无线电通信技术,2012,38(4):54 -56.
[9] 周 磊.网络流量丢包率预测模型[J].无线电工程,2011,41(10):7 -8,20.
[10]张 东,吴晓琳.导弹遥测数据预处理方法研究[J].信息技术,2011(11):134-137.
[11]张向林,唐海波,成红艳.遥测数据对接中的副帧计数修正方法[J].导弹技术,2011(3):62-64.
[12]谢会琴,孙 喜.弹上遥测时间和地面时间分析研究[J].导弹试验技术,2008(4):49 -52.
[13]李 刚,魏海涛,孙书良.导航设备时延测量技术分析[J].无线电工程,2011,41(12):32 -35.
[14]卢 冀,张之义,王俊芳,等.一种适用于虚拟机网络的数据包高效传输方法[J].无线电通信技术,2013,39(6):34-36,47.
猜你喜欢
科学大众·小诺贝尔(2023年10期)2023-10-20 13:48:41
少先队活动(2020年9期)2020-12-17 06:17:31
阅读(快乐英语高年级)(2020年10期)2020-01-08 02:20:31
电子制作(2019年11期)2019-07-04 00:34:40
电子测试(2018年13期)2018-09-26 03:30:00
电信科学(2016年7期)2016-11-30 08:21:59
科技创新导报(2016年3期)2016-05-30 23:19:30
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
电子技术应用(2014年12期)2014-12-10 05:37:50
中国卫生(2014年12期)2014-11-12 13:12:38
