
C800型摩擦焊机润滑系统的检测状态主导故障诊断方法*
2014-01-01 03:12杨正强杜随更田军委王允锋
西安工业大学学报 2014年12期
杨正强,杜随更,权 冬,田军委,王允锋
(1.西北工业大学 现代设计与集成制造技术教育部重点实验室,西安710072;2.西安工业大学 机电工程学院,西安710021;3.华为技术有限公司,西安710075)
液压系统是摩擦焊机的主要组成部分,摩擦焊机运行的稳定性和可靠性和液压系统密切相关,对于液压系统故障状况,许多研究人员致力于其故障机理分析和研究[1-4],从而为后续故障判断和排除提供理论依据,以进一步提高整个系统工作的可靠性.目前设备故障诊断中最常用的方法之一是故障树分析方法.故障树分析法(Fault Tree Analysis,FTA)通过分析造成系统故障的各种因素,绘制顶事件和底事件的倒立树状逻辑因果关系框图,然后通过概率理论的计算得到系统各事件发生的概率,以此为依据分析系统状态,识别故障源[5].故障树是一种利用事件因果关系,表征系统故障状态的逻辑图,该模型对系统的故障模式进行演绎推理,在故障识别中将各实施单元故障同其组成系统故障联系起来,寻找导致系统故障的全部影响环节[6-7].对于给定系统,其故障具有层次性,各实施单元与系统故障表象之间往往呈多层次结构,故障和故障源之间构成了一系列因果链,从全局看,这些因果链具有“树”型拓扑结构,因此称之为故障树.故障树由一系列事件组成,其基本事件包括顶事件、底事件和中间事件.
本文以液压润滑系统各类检测数据为基准建立故障树,通过对检测数据的分析判断确定中间事件的具体状态,改进传统故障树需要简化及分析时全程遍历的缺点,增强中间事件在系统状态识别和故障诊断中的优先识别权,简化了系统分析和识别流程.
1 摩擦焊机润滑系统经典故障树模型
C800型摩擦焊机润滑系统承担摩擦焊机整个主轴箱的润滑任务,包括润滑油泵、润滑油箱以及系列滑油管路.润滑系统的液压原理如图1所示.

图1 C800型摩擦焊机润滑系统液压原理简图Fig.1 Lubrication system hydraulic principle diagram of C800friction welding machine
在图1所示润滑系统中,根据经典故障树模型结构,润滑系统故障事件包含三个下层中间事件,即压力过高、压力过低、压力缺失,其故障模型为

式中:ZR11为压力过高故障事件;ZR12为压力过低故障事件;ZR13为压力缺失故障事件.

式中:XR21为恒压泵压力偏高事件;XR22为压力表显示偏高事件;XR23为供油管路堵塞事件.

式中:XR24为恒压泵压力偏低事件;XR25为压力表显示偏低事件;XR26为溢流阀溢流压力偏低事件;XR27为过滤器阻塞事件.

式中:XR28为恒压泵停止事件;XR29为压力表失效事件.
在确定系统底事件时,根据实际系统故障情况进行选择,因此本文的模型并不是一个涵盖所有单元的完备模型,而是根据先验知识得到的简化模型.式(1)~(4)表示了润滑系统故障树事件,其中恒压泵压力偏移和压力表显示偏移分别定义了两个事件,这种表示方法更加详细明确,但底事件样本空间增加,当系统复杂时使得故障树模型变得很复杂,增加了计算量.为了简化故障树底事件,即从检测状态出发,得出中间事件和底事件.
2 状态主导故障树
2.1 状态主导故障树定义
检测状态故障树在构建中间事件时,优先考虑中间事件和检测数据的关联性,即故障树中的中间事件均能够从检测数据中直接判别出来.
定义:设Zij为故障树第i层第j个中间事件,Lk为系统第k个传感器检测数据,m为系统检测数据样本容量,如果Zij具有属性为

即中间事件由检测数据计算得出,则称该故障树为检测状态故障树.检测状态主导故障树具有属性为

根据上述定义,在检测状态主导故障树模型中,一个底事件有可能导致多于一种的故障现象,这一特点和实际故障系统非常吻合,而识别并确定故障源就是故障诊断过程.对于每一个故障树分支,其底事件相互独立,即满足关系为由于该模型中,故障集由检测数据产生,因此所有故障状态是可测的,这利于计算机辅助故障诊断.对于一个树分支,根据对应中间事件的值和故障模型,可计算出故障源概率,即


式中:JXi为和Xi相关的中间事件下标集合.
根据上述定义,可以建立摩擦焊机润滑系统检测状态主导故障树模型.
2.2 C800型摩擦焊机润滑系统检测状态主导故障树
事实上,恒压泵压力偏高、偏低和停止都可认定为恒压泵故障,压力表显示偏高、偏低和没显示,都可认定为压表表故障,因此,可对经典故障树故障空间进行合并简化,简化后式(2)~(4)变为

式中:XR21为恒压泵压力故障事件;XR22为压力表故障事件;XR23为管路堵塞事件;XR24为溢流阀溢流压力偏低事件;XR25为过滤器阻塞事件.
在检测状态主导故障树模型中,底事件用连续的状态参数表示,包含的信息非常丰富,而不是单纯的故障与否,因此具备条件进行简化.
经过简化,底事件由9个缩减为5个.简化后润滑系统故障树模型拓扑结构如图2所示.
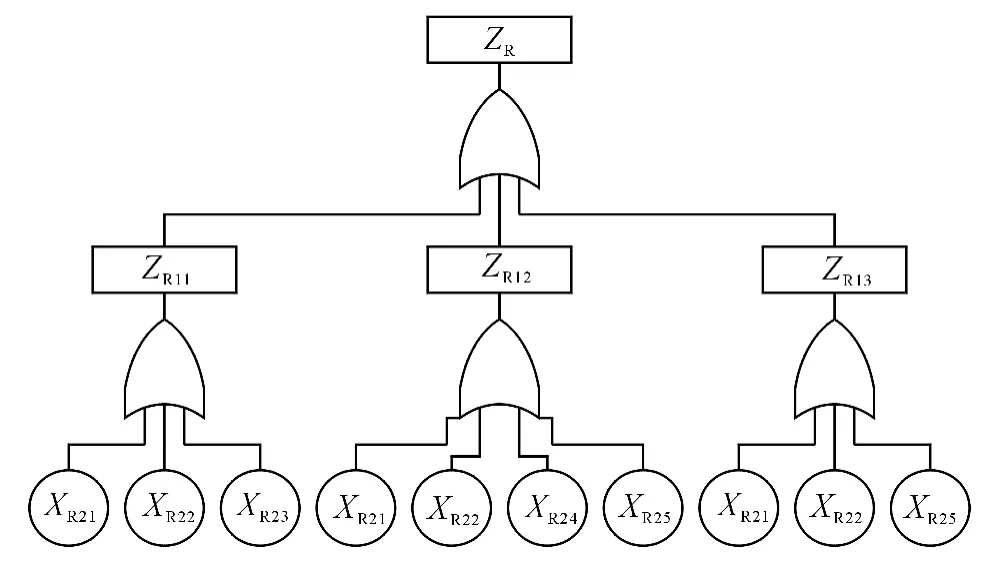
图2 润滑系统故障树Fig.2 Fault tree of lubrication system
根据上述分析,状态主导故障树建模方法是一个反推过程,即由观测结果出发,逐步推导出各个单元故障状态.由于底事件状态重复性,最终底事件状态空间只有5个,为后续故障诊断提供便利.
3 状态主导故障树故障诊断算法
在经典故障树故障诊断算法中,每一底事件的故障概率是按照中间事件和顶事件的条件概率计算,即根据先验知识,当判别出故障类别后,根据诊断算法计算出各个底事件的故障概率.在实际应用中,希望直接根据检测结果进行识别和诊断.
设中间事件状态集为

则顶事件故障诊断结果为

式中:k为故障代码;定义0为压力过高;1为压力过低;2为压力缺失.
式中:FR(p)为状态转移算法向量;p为压力表检测压力.

式中:ai,bi为模型系数;ph为 高 压 阈 值;pl为 低 压阈值;pz为压力缺失阈值.同样的,根据ZR1中元素的值可以计算出各个底事件的概率.

XR2i基本算式为

式中:αil为底事件XR2i在ZR1j条件下修正参数;PR2ij为底事件XR2i在ZR1j条件下先验概率.
根据式(10)~(18),状态主异故障树故障诊断算法根据压力检测数据可以计算出每个底事件的故障概率,这样可为故障诊断排除提供全面的信息.
4 仿真及分析
在供油压力为0~16MPa,额定压力p=8 MPa,高压阈值ph=10MPa,低压阈值pl=6 MPa,压力缺失阈值pz=2MPa条件下,转移算法向量为

条件先验概率和修正系数见表1~2.

表1 底事件先验概率PR2ijTab.1 Priori probability of bottom events

表2 底事件故障概率计算修正系数Tab.2 Correction coefficients of failure probability of bottom event
在全压力范围内,三种状态隶属度曲线如图3所示.可以看出,中间事件隶属度转移算法计算结果和滑油压力密切相关,当压力低于2MPa时,压力缺失隶属度取值最大,而压力过高事件隶属度为0;当压力在2~8MPa范围时,压力过低隶属度取值最大,压力缺失取较小的值,压力过高事件隶属度为0;当压力在8~16MPa范围时,压力过高隶属度最大,而压力缺失和压力过低隶属度为0.隶属度变化情况和实际压力变化情况吻合,说明所提出的隶属度转移算法是正确的.
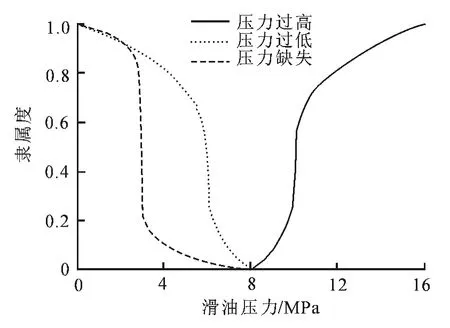
图3 各个状态隶属度曲线Fig.3 Membership degree curve of all operating status
由图4~6仿真结果可以看出,在每一种中间事件条件下,根据先验概率,只有和本事件相关的底事件隶属度取值不为0,其余的事件隶属度均为0,即这些底事件和该中间时间无关.在每一种中间事件下,各底事件的隶属度存在差异,先验故障概率高的事件隶属度也高.这样,在出现某故障时,可根据隶属度情况逐步排查,寻找故障源.

图4 不同压力下底事件对压力过高隶属度Fig.4 Membership degree of bottom events under different pressure belongs to over pressure

图5 不同压力下底事件对压力过低隶属度Fig.5 Membership degree of bottom events under different pressure belongs to low pressure

图6 不同压力下底事件对压力缺失隶属度Fig.6 Membership degree of bottom events under different pressure belongs to pressure lose
根据液压润滑系统压力表数据,可以识别故障种类,并计算出在该类故障状态下各底事件的故障概率,增加了故障诊断的自适应性.同时,文中的方法得到的隶属度是连续变化的,可根据隶属度变化情况和变化趋势判别系统运行状态,为故障提前预防提供依据.
5 结 论
1)本文在传统故障树模型基础上,结合自动故障诊断系统的特点,提出了检测状态主导故障树方法,利用该方法建立了C800摩擦焊机液压系统完备故障树模型,并建立了基于该模型的故障诊断算法.
2)中间事件状态转移算法能够根据压力计算出三个状态隶属度,隶属度分布和实际压力状态相符;根据所提出的故障诊断算法,能够计算出各底事件对相应中间事件的隶属度,隶属度分布和状态主导故障树模型相对应;根据中间事件和底事件的隶属度变化情况,可以判别系统运行状态,为后续状态评估和故障预防奠定基础.
[1] 钟秉林,黄仁.机械故障诊断学[M].北京:机械工业出版社,2009.ZHONG Bing-lin,HUANG Ren.The Mechanical Fault Diagnosis[M].Beijing:Mechanical Industry Press,2009.(in Chinese)
[2] AN L,SEPEHRI N.Hydraulic Actuator Circuit Fault Detection Using Extended Kalman Filter[C]//Proceedings of the American Control Conference.Denver:Proc Am Control Conf,2003:4261.
[3] 陆望龙.液压系统使用与维修手册[M].北京:化学工业出版社,2008.LU Wang-long.Hydraulic System Use and Repair Manual[M].Beijing:Chemical Industry Press,2008.(in Chinese)
[4] 杜随更,鄢君辉,傅莉.计算机闭环控制系统在摩擦焊接中的应用.[J]机械科学与技术,2014(3):300.DU Sui-geng,YAN Jun-hui,FU Li.Application of a Closed-Loop Control System to Friction Welding[J].Mechanical Science and Technology for Aerospace Engineering,2014(3):300.(in Chinese)
[5] 丰世林.基于模糊故障树的民航运输机着陆防滞刹车系统故障诊断研究[J].液压与气动,2010(5):77.FENG Shi-lin.Fault Diagnosis of Aero-Transport Landing Gear Antiskid Brake System Based on Fuzzy Fault Tree[J].Chinese Hydraulics & Pneumatics,2010(5):77.(in Chinese)
[6] 张晓丽.基于不确定性分析的模糊故障树的模糊数选择[J].重庆工学院学报,2013(5):19.ZHANG Xiao-li.Choosing of Fuzzy Number in Fuzzy Fault Tree Analysis Base on Uncertainty Study[J].Journal of Chongqing Institute of Technology,2013(5):19.(in Chinese)
[7] 刘少辉,林少芬,江小霞.基于模糊故障树分析法的舵机液压系统可靠性研究.[J]船舶工程,2012,30(5):27.LIU Shao-hui,LIN Shao-fen,JIANG Xiao-xia.Reliability Study of Steer Hydraulic System Based on Fuzzy Fault Tree Analysis[J].Ship Engineering,2012,30(5):27.(in Chinese)
猜你喜欢
机电安全(2022年4期)2022-08-27
防爆电机(2022年4期)2022-08-17
一重技术(2021年5期)2022-01-18
设备管理与维修(2021年23期)2021-02-10
电子制作(2018年10期)2018-08-04
电子制作(2016年1期)2016-11-07
现代营销(创富信息版)(2016年11期)2016-08-22
汽车维护与修理(2016年3期)2016-02-28
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
汽车维护与修理(2015年6期)2015-02-28
- 西安工业大学学报的其它文章
- 热障涂层对活塞温度场影响的三维分析*